") 自主潛艇在沒(méi)有GPS的情況下使用人工智能尋路
自主潛艇在沒(méi)有GPS的情況下使用人工智能尋路
無(wú)人潛航器(UUV)是一種水下機(jī)器人,在沒(méi)有人的情況下運(yùn)行。這些運(yùn)載工具的早期使用案例包括深海勘探和水下水雷的禁用等工作。然而,由于水的扭曲效應(yīng),無(wú)人潛水器的通信和導(dǎo)航控制較差。因此,研究人員已經(jīng)開(kāi)始開(kāi)發(fā)機(jī)器學(xué)習(xí)技術(shù),幫助無(wú)人潛航器更好地自主導(dǎo)航。
也許研究人員正在努力解決的最大挑戰(zhàn)是缺乏GPS信號(hào),因?yàn)镚PS信號(hào)無(wú)法穿透水面。其他類型的依賴相機(jī)的導(dǎo)航技術(shù)也無(wú)效,因?yàn)樗孪鄼C(jī)的能見(jiàn)度很低。
研究人員表示,他們的目的之一是最終幫助解決清除累積在船體上的生物的危險(xiǎn)工作。這些堆積物,也被稱為生物膜,通過(guò)引入入侵物種對(duì)環(huán)境構(gòu)成威脅,并通過(guò)增加的船舶阻力提高了運(yùn)輸成本。
在上個(gè)月發(fā)表在IEEE Access(https://ieeexplore.ieee.org/xpl/RecentIssue.jsp?punumber=6287639)雜志上的這項(xiàng)研究(ieeexplore.ieee.org/document/10304148)中,來(lái)自澳大利亞和法國(guó)的研究人員使用了一種稱為深度強(qiáng)化學(xué)習(xí)的機(jī)器學(xué)習(xí)方法,幫助無(wú)人潛航器在困難條件下更準(zhǔn)確地導(dǎo)航。
在強(qiáng)化學(xué)習(xí)(spectrum.ieee.org/tag/reinforcement-learning)中,UUV模型從執(zhí)行隨機(jī)動(dòng)作開(kāi)始,然后觀察這些動(dòng)作的結(jié)果,并將其與目標(biāo)進(jìn)行比較——在這種情況下,盡可能接近目標(biāo)目的地;加強(qiáng)積極結(jié)果的行動(dòng),避免導(dǎo)致不良結(jié)果的行動(dòng)。
海洋給無(wú)人潛航器的導(dǎo)航挑戰(zhàn)增加了另一層復(fù)雜性,強(qiáng)化模型必須學(xué)會(huì)克服這些挑戰(zhàn)。洋流很強(qiáng),可以將潛航器帶到遠(yuǎn)離預(yù)定路徑的不可預(yù)測(cè)的方向。因此,無(wú)人潛水器需要導(dǎo)航,同時(shí)還要補(bǔ)償來(lái)自電流的干擾。
為了達(dá)到最佳效果,研究人員調(diào)整了強(qiáng)化學(xué)習(xí)的長(zhǎng)期慣例。這項(xiàng)研究的主要作者、澳大利亞阿德萊德弗林德斯大學(xué)科學(xué)與工程學(xué)院的副研究員Thomas Chaffre表示,他的團(tuán)隊(duì)的出發(fā)點(diǎn)是該領(lǐng)域研究大規(guī)模遷移的一部分。今天,包括谷歌DeepMind在內(nèi)的機(jī)器學(xué)習(xí)研究人員Chaffre表示,質(zhì)疑關(guān)于強(qiáng)化學(xué)習(xí)訓(xùn)練過(guò)程的長(zhǎng)期假設(shè)正變得越來(lái)越普遍,他們正在尋找可以顯著提高訓(xùn)練成績(jī)的微小變化。
在這種情況下,研究人員專注于改變強(qiáng)化學(xué)習(xí)的記憶緩沖系統(tǒng),該系統(tǒng)用于存儲(chǔ)過(guò)去動(dòng)作的結(jié)果。存儲(chǔ)在存儲(chǔ)緩沖器中的動(dòng)作和結(jié)果在整個(gè)訓(xùn)練過(guò)程中被隨機(jī)采樣,以更新模型的參數(shù)。Chaffre說(shuō),通常這種采樣是以“獨(dú)立且相同分布”的方式進(jìn)行的,這意味著它用來(lái)更新的操作完全是隨機(jī)的。
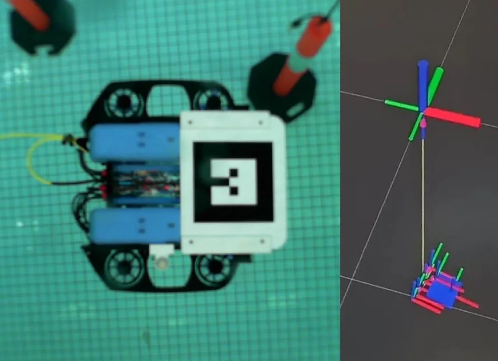
T CHAFFRE/FLINDERS UNIVERSITY
研究人員對(duì)訓(xùn)練過(guò)程進(jìn)行了改變,使其從記憶緩沖區(qū)中采樣,其方式更類似于人類大腦的學(xué)習(xí)方式。與其有平等的機(jī)會(huì)從過(guò)去的所有經(jīng)歷中學(xué)習(xí),不如更多地重視那些帶來(lái)巨大積極成果的行動(dòng),以及最近發(fā)生的行動(dòng)。Chaffre說(shuō):“當(dāng)你學(xué)習(xí)打網(wǎng)球時(shí),你會(huì)更多地關(guān)注最近的經(jīng)歷。隨著你看到進(jìn)步,你將不在乎開(kāi)始訓(xùn)練時(shí)的表現(xiàn),因?yàn)樗辉倌荏w現(xiàn)出任何關(guān)于你當(dāng)前水平的信息。”
Chaffre說(shuō),同樣,當(dāng)強(qiáng)化算法從過(guò)去的經(jīng)驗(yàn)中學(xué)習(xí)時(shí),它應(yīng)該主要集中在最近的行動(dòng)上,這些行動(dòng)帶來(lái)了巨大的積極收益。
研究人員發(fā)現(xiàn),當(dāng)使用這種自適應(yīng)內(nèi)存緩沖技術(shù)時(shí),UUV模型可以更快地訓(xùn)練,同時(shí)消耗更少的功率。Chaffre說(shuō),這兩種改進(jìn)在部署無(wú)人潛航器時(shí)都提供了顯著的優(yōu)勢(shì),因?yàn)楸M管經(jīng)過(guò)訓(xùn)練的模型可以隨時(shí)使用,但仍需要對(duì)其進(jìn)行微調(diào)。
Chaffre說(shuō):“因?yàn)槲覀冋谘芯克聶C(jī)器人,使用它們的成本非常高,而且用它們訓(xùn)練強(qiáng)化學(xué)習(xí)算法非常危險(xiǎn)。” 因此,他補(bǔ)充道,減少模型微調(diào)的時(shí)間可以防止?jié)摵狡鲹p壞,并節(jié)省維修費(fèi)用。他說(shuō),該團(tuán)隊(duì)未來(lái)的計(jì)劃包括在海洋中的物理無(wú)人潛航器上測(cè)試新的訓(xùn)練算法。
-
gps
+關(guān)注
關(guān)注
22文章
2963瀏覽量
168495 -
人工智能
+關(guān)注
關(guān)注
1804文章
48705瀏覽量
246473 -
導(dǎo)航技術(shù)
+關(guān)注
關(guān)注
0文章
35瀏覽量
9781
原文標(biāo)題:自主潛艇在沒(méi)有GPS的情況下使用人工智能尋路
文章出處:【微信號(hào):IEEE_China,微信公眾號(hào):IEEE電氣電子工程師】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
智慧路燈如何應(yīng)用人工智能技術(shù)

ads1256有沒(méi)有辦法在不換ad的情況下采集10路信號(hào)?
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】1.初步理解具身智能
在VDD1沒(méi)有供電的情況下,VDD2正常供電的情況下,AMC1200的輸出應(yīng)該是什么狀態(tài)?
嵌入式和人工智能究竟是什么關(guān)系?
《AI for Science:人工智能驅(qū)動(dòng)科學(xué)創(chuàng)新》第6章人AI與能源科學(xué)讀后感
AI for Science:人工智能驅(qū)動(dòng)科學(xué)創(chuàng)新》第4章-AI與生命科學(xué)讀后感
《AI for Science:人工智能驅(qū)動(dòng)科學(xué)創(chuàng)新》第一章人工智能驅(qū)動(dòng)的科學(xué)創(chuàng)新學(xué)習(xí)心得
risc-v在人工智能圖像處理應(yīng)用前景分析
名單公布!【書(shū)籍評(píng)測(cè)活動(dòng)NO.44】AI for Science:人工智能驅(qū)動(dòng)科學(xué)創(chuàng)新
報(bào)名開(kāi)啟!深圳(國(guó)際)通用人工智能大會(huì)將啟幕,國(guó)內(nèi)外大咖齊聚話AI
利用人工智能改變 PCB 設(shè)計(jì)

FPGA在人工智能中的應(yīng)用有哪些?
人工智能駕駛技術(shù)包括哪些技術(shù)
大模型應(yīng)用之路:從提示詞到通用人工智能(AGI)
- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測(cè)量?jī)x表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無(wú)線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測(cè)
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 產(chǎn)品地圖
- 品牌地圖
- 社區(qū)
- 小組
- 論壇
- 問(wèn)答
- 評(píng)測(cè)試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開(kāi)發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測(cè)驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動(dòng)態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:[email protected]
- 內(nèi)容合作
- 黃晶晶:[email protected]
- 內(nèi)容合作(海外)
- 張迎輝:[email protected]
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:[email protected]
- 投資合作
- 曾海銀:[email protected]
- 社區(qū)合作
- 劉勇:[email protected]
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開(kāi)發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
評(píng)論