") 利用 C2000 實(shí)時 MCU 實(shí)現(xiàn)低成本、高能效的 EV 電機(jī)電力控制設(shè)計(jì)
利用 C2000 實(shí)時 MCU 實(shí)現(xiàn)低成本、高能效的 EV 電機(jī)電力控制設(shè)計(jì)
作者:Jens Wallmann
隨著現(xiàn)代電動汽車 (EV) 和混合動力汽車 (HEV)對電力電子技術(shù)的需求迅速增長,設(shè)計(jì)人員越來越多地面臨幾乎難以克服的困難。動力系統(tǒng)和能量轉(zhuǎn)換系統(tǒng)的能效和功率密度越高,所需的控制電子裝置越復(fù)雜,需要采用能在高開關(guān)頻率下實(shí)現(xiàn)的高效氮化鎵(GaN) 和碳化硅 (SiC) 技術(shù)。除功能安全外,聯(lián)網(wǎng)車輛還需滿足 IT 級安全要求,并采用固件線上更新 (FOTA) 等系統(tǒng)干預(yù)措施。
面對緊張的開發(fā)預(yù)算和競爭激烈的最終產(chǎn)品價格,電力電子設(shè)計(jì)人員最終只能設(shè)法簡化系統(tǒng)設(shè)計(jì),包括部署更多的集成控制解決方案。
為了幫助應(yīng)對這些挑戰(zhàn),本文探討了 Texas Instruments 的 C2000 系列中符合汽車標(biāo)準(zhǔn)的實(shí)時微控制器 (MCU)的一些優(yōu)勢,這些微控制器適用于 EV 和 HEV 的驅(qū)動控制和電源轉(zhuǎn)換器。在簡要介紹 F28003x
控制器系列的功能和接口后,本文深入介紹了牽引逆變器中的磁場定向控制 (FOC) 和車載充電器中滯后電流控制的實(shí)現(xiàn)。
受控驅(qū)動器和電源轉(zhuǎn)換器的效率更高
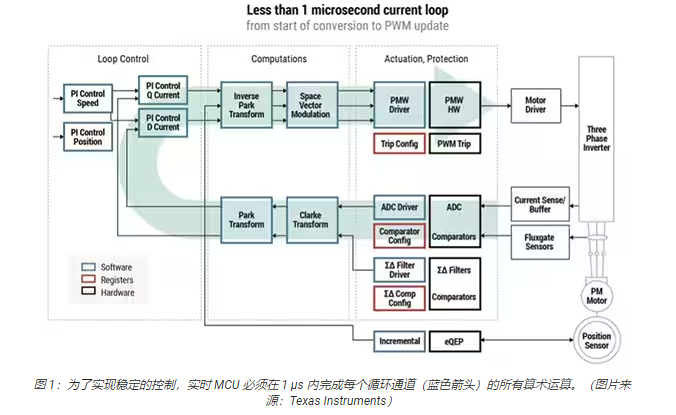
當(dāng)今 EV 和 HEV 性能優(yōu)異,這在很大程度上歸功于驅(qū)動器和電源轉(zhuǎn)換器的電子控制。這些子系統(tǒng)中使用的實(shí)時 MCU采用了復(fù)雜的控制算法和準(zhǔn)確的電機(jī)模型,響應(yīng)速度極快,控制延遲只有幾微秒。如果實(shí)時閉環(huán)控制太慢,錯過了規(guī)定的時間窗,控制環(huán)的穩(wěn)定性、精確度和效率就會下降。
為了使用標(biāo)準(zhǔn)庫中的比例積分微分 (PID) 控制器,矢量控制器將三相定子電流系統(tǒng)轉(zhuǎn)化為二維電流空間矢量來控制磁通密度和轉(zhuǎn)子扭矩。快速電流回路(圖 1中的藍(lán)色箭頭)應(yīng)實(shí)現(xiàn)小于 1 μs 的控制延遲。
結(jié)合快速矢量控制(如 FOC)和高效的內(nèi)部永磁同步磁阻電機(jī) (IPM-SynRM),相比傳統(tǒng)的直流電機(jī)(即永磁同步電機(jī),或PMSM),電機(jī)驅(qū)動器實(shí)現(xiàn)了大扭矩且效率高達(dá) 96%。設(shè)計(jì)人員可以使用 C2000 系列實(shí)時 MCU 和 C2000WARE-MOTORCONTROL-SDK軟件,在 IPM-SynRM 的洛倫茲力和磁阻力之間實(shí)現(xiàn)可變扭矩控制,既省時又經(jīng)濟(jì)。即使沒有磁鐵或位置傳感器,F(xiàn)OC 也能以高精度控制SynRM,既降低系統(tǒng)成本,也減輕重量,并且電機(jī)更耐過載。
AC-DC 電源轉(zhuǎn)換器可用作 EV 車載充電器 (OBC),也可反過來用作光伏逆變器,因此保持電網(wǎng)不受諧波失真的影響至關(guān)重要。這種非清潔零電壓開關(guān)(ZVS) 可以用電流的混合滯后控制 (HHC) 抵消。這里,開發(fā)人員還可以使用 C2000 MCU,通過應(yīng)用C2000WARE-DIGITALPOWER-SDK 軟件庫中的高性能控制算法來加速電路設(shè)計(jì)。
使用 C2000 MCU 簡化 EV 系統(tǒng)設(shè)計(jì)
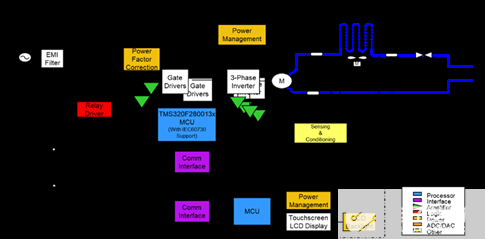
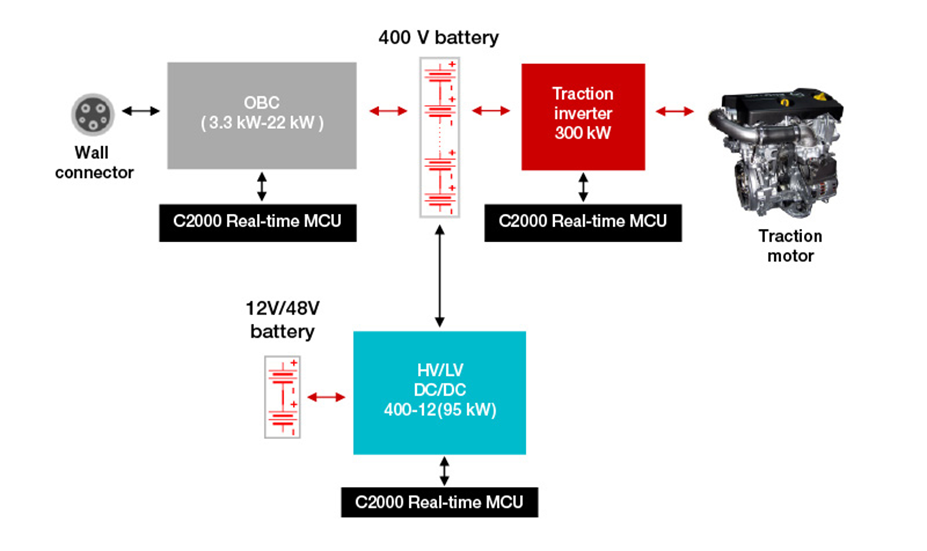
為了簡化電力系統(tǒng)設(shè)計(jì),Texas Instruments 提供 C2000 系列實(shí)時MCU,用于快速實(shí)現(xiàn)復(fù)雜的電力控制,憑借全面的硬件和軟件開發(fā)環(huán)境,可實(shí)現(xiàn)多樣化的靈活控制設(shè)計(jì)。借助一個 C2000 MCU,汽車設(shè)計(jì)人員能將動力系統(tǒng)設(shè)計(jì)為同時處理板載充電器、DC-DC 轉(zhuǎn)換器和牽引逆變器,成本減半,實(shí)現(xiàn)了更小、更實(shí)惠的 EV 動力系統(tǒng)。也可實(shí)現(xiàn)諸如HVAC、駕駛輔助系統(tǒng)和燃料電池控制等應(yīng)用。
系統(tǒng)設(shè)計(jì)人員可以使用一個強(qiáng)大的 MCU 來控制分布在整車的多個電力電子和系統(tǒng)元器件。TI 網(wǎng)站,特別是 Resource Explorer 和 C2000 Academy,以規(guī)格書、應(yīng)用說明、評估板、參考設(shè)計(jì)、培訓(xùn)視頻和開發(fā)人員論壇的形式為設(shè)計(jì)人員提供了大量支持。
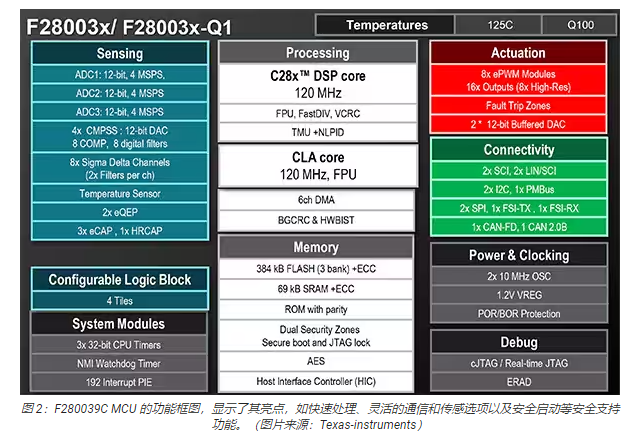
Texas Instruments 專門針對 F28003x 系列實(shí)時控制器進(jìn)行了適用于 EV 的性能、集成度和成本優(yōu)化,還提供 240 MIPS的處理能力和集成的實(shí)時控制外設(shè),電路設(shè)計(jì)人員無需 FPGA 即可提高其基于F280039CSPZ MCU的電機(jī)控制和電源轉(zhuǎn)換系統(tǒng)的精度和能效。此外,由于開關(guān)頻率更高、磁性元器件更小且冷卻面積要求更低,易于實(shí)施的 GaN 和 SiC技術(shù)減少了開關(guān)損耗并提高了功率密度。
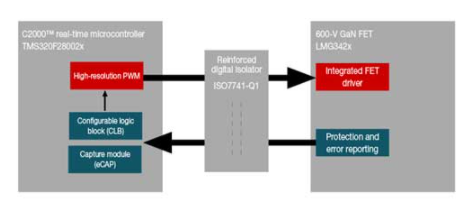
F28003x 系列支持控制器區(qū)域網(wǎng)絡(luò)全雙工 (CAN FD) 通信和多個快速串行接口。384 KB 的集成閃存為實(shí)現(xiàn)聯(lián)網(wǎng)的物聯(lián)網(wǎng) (IoT)功能提供了充足的存儲空間。片上安全功能,如安全啟動、AES 加密引擎、JTAG 鎖和硬件內(nèi)置自檢(HWBIST),可確保聯(lián)網(wǎng)的系統(tǒng)干預(yù),如確保實(shí)時固件和固件線上更新(FOTA) 的安全,防止被篡改。這些 MCU 符合 ASIL B的要求,并內(nèi)置了功能安全性,加快了應(yīng)用開發(fā)和必要的上市認(rèn)證。圖 2 為基本功能和界面概述。
TMDSCNCD280039C,是合適 F280039C 的評估板,非常適合用于測試和原型設(shè)計(jì)。要使用帶有 HSEC180 排針(180針高速邊緣連接器)的 controlCARD,需要 TMDSHSECDOCK 180 針塢站。
用于定制邏輯的可配置邏輯塊 (CLB)
借助創(chuàng)新的可配置邏輯塊 (CLB),編程人員可將自定義邏輯集成到 C2000 實(shí)時控制系統(tǒng)中,無需外部邏輯、FPGA、CPLD 或 ASIC。增加 CLB后,現(xiàn)有的 C2000 外圍模塊,如增強(qiáng)型脈寬度調(diào)制器 (ePWM)、增強(qiáng)型捕獲 (eCAP) 或增強(qiáng)型正交編碼器脈沖(eQEP),可通過客戶特定的信號和功能進(jìn)行擴(kuò)展。
邏輯塊通過 C2000 SysConfig 進(jìn)行配置,可在 C2000Ware 中找到。配置需要 SysConfig 工具,該工具是 TI CodeComposer Studio (CCS) 集成開發(fā)環(huán)境 (IDE) 的一部分,也可作為獨(dú)立工具與其他 IDE 一起使用(圖 3)。
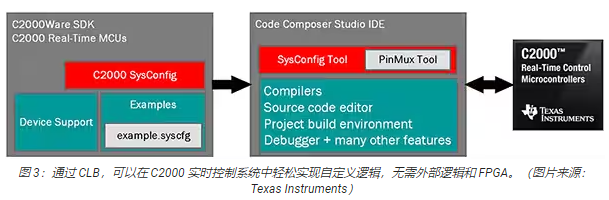
C2000Ware 軟件和說明文檔包提供廣泛的特定設(shè)備驅(qū)動程序、庫和應(yīng)用示例,并且使用 CLB 擴(kuò)展外圍設(shè)備,可最大限度減少開發(fā)時間。
C2000 嵌入式應(yīng)用程序的代碼開發(fā)和調(diào)試基于 CCS IDE。該工具集包括一個優(yōu)化的C/C++編譯器、源代碼編輯器、項(xiàng)目構(gòu)建環(huán)境、調(diào)試器、分析器等功能。這種直觀的集成開發(fā)環(huán)境提供單一用戶界面,逐步引導(dǎo)用戶完成應(yīng)用開發(fā)。熟悉的工具和界面基于Eclipse 軟件框架,有助于用戶快速上手。
時鐘和測試
程序員可以在編程或驗(yàn)證期間使用嵌入式圖形生成器 (EPG) 來處理簡單的測試場景,而不是使用 CLB 干預(yù)復(fù)雜的時鐘外設(shè)。獨(dú)立的 EPG模塊有利于生成定制的脈沖模式 (SIGGEN) 和時鐘信號 (CLOCKGEN),但也可以捕獲和重塑傳入的串行數(shù)據(jù)流或與生成的時鐘信號同步。
要以非侵入式方式對 C2000 實(shí)時系統(tǒng)中的 CPU 總線和設(shè)備事件進(jìn)行調(diào)試、監(jiān)測和分析,可使用嵌入式實(shí)時分析與診斷(ERAD)。硬件模塊提供了擴(kuò)展的總線比較器和系統(tǒng)事件計(jì)數(shù)器,位于 MCU 總線架構(gòu)內(nèi)(圖 4)。
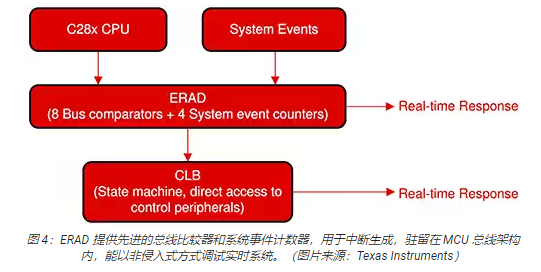
ERAD 可以獨(dú)立生成系統(tǒng)級中斷和標(biāo)志,并將其送入其他外設(shè),如 CLB。
使用 C2000 MCU 更快地實(shí)現(xiàn) FOC 發(fā)動機(jī)控制
使用矢量控制來實(shí)現(xiàn) IPM-SynRM的可變扭矩控制較為復(fù)雜。根據(jù)速度和負(fù)載扭矩,該算法必須控制兩個旋轉(zhuǎn)坐標(biāo)系之間的偏移角。因此,通過移相控制,轉(zhuǎn)子能夠以電氣方式領(lǐng)先或滯后于旋轉(zhuǎn)的定子磁場最多
±90°,允許在 RM 和 PMSM 之間的可變操作。使用 TI 的電機(jī)控制軟件開發(fā)工具包可以快速實(shí)現(xiàn)對磁通密度和轉(zhuǎn)子扭矩的復(fù)雜控制。
該軟件基于幾十年的綜合專業(yè)知識,包含在 C2000 電機(jī)控制評估模塊 (EVM) 和 TI 設(shè)計(jì) (TID) 上運(yùn)行的固件。用于矢量控制的兩個關(guān)鍵功能庫是InstaSPIN-FOC(無編碼器的 FOC 電機(jī)控制)和 DesignDRIVE(需要編碼器 FOC 電機(jī)控制)。
InstaSPIN-FOC 的主要特點(diǎn):
無傳感器扭矩或速度 FOC
用于轉(zhuǎn)子估算的磁通量、角度、速度和扭矩 (FAST) 軟件觀察器
電機(jī)參數(shù)識別
觀察器和扭矩控制回路自動調(diào)諧
性能優(yōu)異,適合低速和高動態(tài)應(yīng)用
FOC 控制回路的一個特點(diǎn)是自適應(yīng) FAST 算法。算法將自動從相電壓和電流中確定磁通密度、電流角、速度和扭矩(圖5)。由于可自動識別電機(jī)參數(shù),設(shè)計(jì)人員可以迅速使新電機(jī)啟動和運(yùn)行,并依靠自動系統(tǒng)對控制回路進(jìn)行微調(diào)。

DesignDRIVE 的主要特點(diǎn):
傳感速度或位置 FOC
位置反饋:旋轉(zhuǎn)變壓器、增量編碼器和絕對編碼器
電流檢測技術(shù):低端分流、串聯(lián)電流采樣和三角積分濾波器解調(diào)
快速電流環(huán) (FCL):軟件庫經(jīng)過優(yōu)化,充分利用硬件資源加速系統(tǒng)的采樣、處理和執(zhí)行,在伺服控制應(yīng)用中以給定的 PWM 頻率實(shí)現(xiàn)最高控制帶寬
實(shí)時連接示例
應(yīng)用示例 1:一個 MCU 控制牽引逆變器和 DC-DC 轉(zhuǎn)換器
汽車制造商傾向于將三種分布式系統(tǒng)元器件合并到一個機(jī)箱中,并盡量減少 MCU 的數(shù)量,以降低系統(tǒng)成本和復(fù)雜性。然而,這需要具有較高實(shí)時控制性能的 MCU來管理這三種元器件。為了解決這個問題,TI 的 TIDM-02009 參考設(shè)計(jì)展示了一種組合設(shè)計(jì),其中包括由一個單一 F28388DPTPS 實(shí)時 MCU控制的 EV/HEV 牽引逆變器和雙向 DC-DC 轉(zhuǎn)換器(圖 6)。

牽引逆變器使用基于軟件的軸角數(shù)字轉(zhuǎn)換器 (RDC) 來驅(qū)動電機(jī),最高可達(dá) 20000 轉(zhuǎn)/分鐘 (rpm)。其功率級包括 Wolfspeed 基于 SiCFET 的 CCS050M12CM2 六路電源模塊,由 TI 的UCC5870QDWJRQ1 智能柵極驅(qū)動器驅(qū)動。最先進(jìn)的 PWM 模塊在比較器子系統(tǒng)(CMPSS) 中集成了斜率補(bǔ)償,可產(chǎn)生 PCMC 波形。電壓傳感路徑使用 TI 的 AMC1311QDWVRQ1 特高隔離放大器,具有 2 V輸入,電流傳感路徑使用 TI 的 AMC1302QDWVRQ1 特高隔離精度放大器,具有 ±50 mV 輸入。
DC-DC 轉(zhuǎn)換器采用峰值電流模式控制 (PCMC) 技術(shù),搭載移相全橋拓?fù)浣Y(jié)構(gòu) (PSFB) 和同步整流 (SR)功能。該轉(zhuǎn)換器具有雙向性,其優(yōu)勢在于,轉(zhuǎn)換器對直流總線電容器進(jìn)行預(yù)充電,無需對繼電器和串聯(lián)電阻限流。基于 CAN FD 的抗干擾通信由集成的TCAN4550RGYTQ1 控制器收發(fā)器模塊提供。
應(yīng)用示例 2:高能效雙向 6.6 kW 交直流轉(zhuǎn)換器
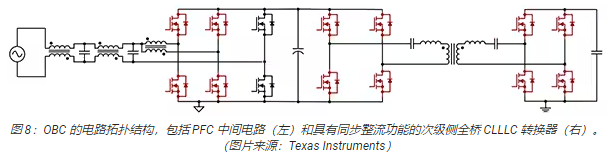
對于相對高功率的輸出,PMP22650 代表基于 GaN FET 的參考設(shè)計(jì),用于處理 6.6 kW 功率的雙向單相交直流轉(zhuǎn)換器。充電器 OBC可以用市電電力對牽引電池進(jìn)行充電,反之,對 DC link 電容器進(jìn)行預(yù)充電。該設(shè)備將初級側(cè) 28 A、240 V 交流電轉(zhuǎn)換為次級側(cè) 19 A、350 V直流電。
單個 F28388DPTPS MCU 控制在 120 kHz 開關(guān)頻率下運(yùn)行的兩相圖騰柱功率因數(shù)校正 (PFC) 鏈路,以及全橋 CLLLC(C =電容器,L = 電感器)拓?fù)洌缓筮M(jìn)行同步整流。CLLLC 轉(zhuǎn)換器使用頻率和相位調(diào)制進(jìn)行輸出調(diào)節(jié),在 200 kHz 至 800 kHz的可變頻率下工作。
圖 7 中,匹配的 TMDSCNCD28388D 控制器卡(中間)控制初級側(cè) PFC 中間電路(左)和具有同步整流功能的次級側(cè)全橋 CLLLC轉(zhuǎn)換器(右)。該設(shè)計(jì)的原理圖見圖 8。

由于采用新開發(fā)的 LMG3522R030-Q1 高速 GaN FET,全功率下能效高達(dá) 96%,開放框架功率密度為 3.8 kW/l。功率因數(shù)為0.999,總諧波失真 (THD) 小于 2%。LMG3522 的替代產(chǎn)品是 LMG3422R030RQZT GaN FET,也適用于汽車,其開關(guān)電壓為 600V,Rds(ON) 為 30 mΩ。它還集成了柵極驅(qū)動器、過載保護(hù)和溫度監(jiān)測。
該 AC-DC 轉(zhuǎn)換器的特點(diǎn)是具有HHC,它可模擬諧振電容上的電壓,顯著降低過零失真。測試結(jié)果也表明瞬態(tài)響應(yīng)更快,而且這種控制回路的設(shè)計(jì)比單回路電壓控制更簡單。
光伏逆變器的示例展示了 HHC 如何有效減少橋式開關(guān)晶體管在過零時的失真(圖 9,左),從而消除了輻射發(fā)射和電網(wǎng)上的失真。通過使用HHC,正弦電網(wǎng)電壓上高達(dá) 7.8% 的三次諧波 THD(圖 9,右上)降低至 0.9%(圖 9,右下)。

順便提一下,這款 6.6 kW DC-DC 轉(zhuǎn)換器的電路設(shè)計(jì)基于 TI 的 TIDA-010062 參考設(shè)計(jì),前述
C2000WARE-DIGITALPOWER-SDK 為這種電源轉(zhuǎn)換器的設(shè)計(jì)提供了便利。
總結(jié)
Texas Instruments 的 C2000 系列實(shí)時 MCU 可以處理汽車電力電子方面的幾乎所有控制任務(wù)。這些 MCU生態(tài)系統(tǒng)的應(yīng)用借助強(qiáng)大的實(shí)時 MCU 聚合并聯(lián)合控制通常為分布式的系統(tǒng)電子設(shè)備,從而以既快速又節(jié)省成本的方式進(jìn)行系統(tǒng)設(shè)計(jì)。
如圖所示,智能 GaN 和 SiC 功率驅(qū)動器相對容易實(shí)現(xiàn)。廣泛的庫功能和記錄充分且預(yù)先認(rèn)證的參考設(shè)計(jì)有助于實(shí)現(xiàn)更具能效的 FOC 電機(jī)控制和轉(zhuǎn)換器HHC 控制。
-
電動汽車
+關(guān)注
關(guān)注
156文章
12373瀏覽量
234106 -
mcu
+關(guān)注
關(guān)注
146文章
17836瀏覽量
360386 -
轉(zhuǎn)換器
+關(guān)注
關(guān)注
27文章
8953瀏覽量
150732 -
電機(jī)
+關(guān)注
關(guān)注
143文章
9248瀏覽量
148347 -
Ev
+關(guān)注
關(guān)注
2文章
213瀏覽量
36315
發(fā)布評論請先 登錄
TI低成本實(shí)時控制C2000 Piccolo F2802x MCU
TMS320F280039C C2000實(shí)時MCU怎么樣
如何利用C2000實(shí)時MCU提高GaN數(shù)字電源設(shè)計(jì)實(shí)用性
C2000?實(shí)時微控制器 (MCU)應(yīng)對GaN 開關(guān)挑戰(zhàn)
利用C2000實(shí)時MCU提高GaN數(shù)字電源設(shè)計(jì)實(shí)用性
利用C2000實(shí)時MCU 提高GaN 數(shù)字電源設(shè)計(jì)實(shí)用性

實(shí)時MCU如何降低實(shí)時技術(shù)的成本
如何使用 C2000? 實(shí)時 MCU 實(shí)現(xiàn)功能安全和網(wǎng)絡(luò)安全的電動汽車動力總成
顯示C2000?控制MCU優(yōu)化信號鏈的實(shí)時基準(zhǔn)
了解 C2000 實(shí)時控制 MCU 的安全特性
第2代C2000實(shí)時MCU的EEPROM模擬
C2000?實(shí)時控制微控制器(MCU)使用入門
C2000實(shí)時控制MCU外設(shè)
C2000實(shí)時控制外設(shè)參考指南
C2000? MCU在有器件復(fù)位時的實(shí)時固件更新





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論