") KUKA工業(yè)機(jī)器人搬運(yùn)工具操作教程三
KUKA工業(yè)機(jī)器人搬運(yùn)工具操作教程三
任務(wù)五:運(yùn)行搬運(yùn)程序
(1)加載程序示教完成后, 保存好的程序必須加載到內(nèi)存中才能運(yùn)行, 選擇“banyun”目錄下banyunl程序,點(diǎn)擊示教界面下方【選定】軟鍵, 完成程序的加載
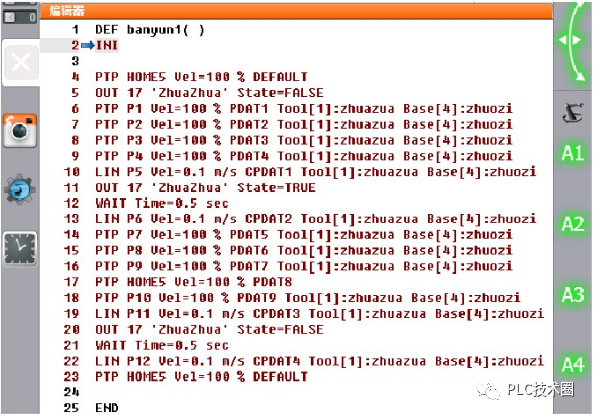
(2)試運(yùn)行程序 程序加載后, 程序執(zhí)行的藍(lán)色指示箭頭位于初始行。將確認(rèn)開(kāi)關(guān)按至中間檔位并按住 ,按住示教器左側(cè)藍(lán)色三角形正向運(yùn)行鍵, 狀態(tài)欄運(yùn)行鍵和程序內(nèi)部運(yùn)行狀態(tài)的文字說(shuō)明為綠色, 則程序開(kāi)始試運(yùn)行, 藍(lán)色指示箭頭下移。
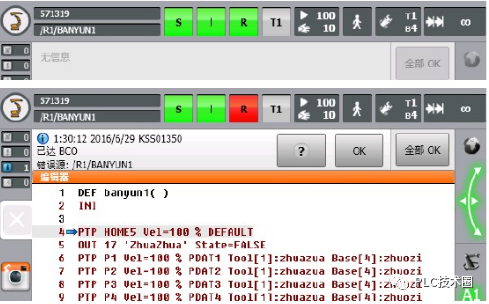
當(dāng)藍(lán)色指示箭頭移至第4行PTP命令行時(shí),彈出 “ BCO”提示信息, 點(diǎn)擊【OK】或【全部OK】軟鍵,繼續(xù)試運(yùn)行程序。
(3)自動(dòng)運(yùn)行程序
在試運(yùn)行過(guò)程中程序測(cè)試無(wú)誤后, 方可進(jìn)行自動(dòng)運(yùn)行程序。自動(dòng)運(yùn)行程序操作步驟如下:
步驟1:加載程序。
步驟2:手動(dòng)操作程序直至程序提示“BCO ” 信息。
步驟3:將連接管理器轉(zhuǎn)動(dòng)到鎖緊位置, 彈出運(yùn)行模式, 選擇 “AUT” 模式, 再將連接管理器轉(zhuǎn)動(dòng)到開(kāi)鎖位置,此時(shí)狀態(tài)顯示編輯欄的 “ Tl ” 改為“AUT”
步驟4:為安全起見(jiàn), 降低機(jī)器人自動(dòng)運(yùn)行速度, 將程序調(diào)節(jié)量設(shè)定為10%。
步驟5:點(diǎn)擊示教器左側(cè)藍(lán)色三角形正向運(yùn)行鍵, 程序自動(dòng)運(yùn)行, 機(jī)器人自動(dòng)完成搬運(yùn)任務(wù), 自動(dòng)運(yùn)行過(guò)程中狀態(tài)顯示編輯欄顯示。
任務(wù)六:循環(huán)搬運(yùn)
參照任務(wù)一至任務(wù)四對(duì)其它五個(gè)工件分別進(jìn)行示教編程,并將程序名設(shè)置為banyun2至banyun6編制主程序利用計(jì)數(shù)循環(huán)for和分支switch-case語(yǔ)句循環(huán)調(diào)用banyun1至banyun6子程序,從而實(shí)現(xiàn)6個(gè)工件的循環(huán)搬運(yùn)。
步驟1:點(diǎn)擊示教界面左上角或示教器右下角機(jī)器人圖標(biāo)進(jìn)入主菜單,然后點(diǎn)擊【配置】→【用戶組】→ 【專家】進(jìn)入專家模式登錄界面如圖所示,輸入密碼kuka即可登錄。

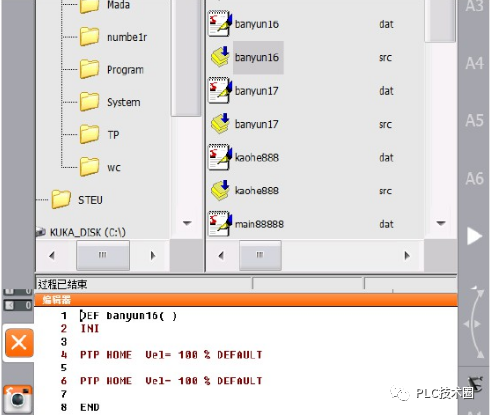
步驟2:登錄后, 點(diǎn)擊示教界面左下角【新建】軟鍵, 新建主程序模塊banyun16如圖所示。點(diǎn)擊【打開(kāi)】軟鍵, 進(jìn)入程序編輯器如圖所示。因?yàn)楸徽{(diào)用子程序banyun1至banyun6中己包含有HOME行, 所以將主程序中兩個(gè)HOME行刪除。
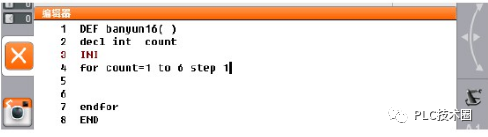
步驟3:因?yàn)橛辛鶄€(gè)子程序需要調(diào)用, 所以在INI行上方聲明一 個(gè)整型變量int count作為循環(huán)計(jì)數(shù)器如圖所示

步驟4:在INI行與 END行之間添加for循環(huán)如圖所示
步驟5:機(jī)器人進(jìn)行第 i 個(gè)工件搬運(yùn)時(shí)需要執(zhí)行banyuni子程序(i為1至6 ), 在for循環(huán)中嵌入switch-case分支語(yǔ)句分別調(diào)用子程序banyunl ()至banyun6 (), 完整的循環(huán)搬運(yùn)主程序如圖所示

項(xiàng)目總結(jié):
通過(guò)本項(xiàng)目學(xué)習(xí), 掌握了 PTP和LIN運(yùn)動(dòng)指令以及WAIT和OUT邏輯指令基本使用;能夠進(jìn)行機(jī)器人運(yùn)動(dòng)軌跡規(guī)劃和程序流程圖指定;能夠進(jìn)行工具坐標(biāo)系和基坐標(biāo)系、 運(yùn)動(dòng)方式以及運(yùn)動(dòng)速度設(shè)定:能夠進(jìn)行程序新建、 測(cè)試和自動(dòng)運(yùn)行能夠進(jìn)行主程序?qū)ψ映绦蛘{(diào)用;能夠進(jìn)行機(jī)器人操作并在線示教編程;獨(dú)立完成工業(yè)機(jī)器人在搬運(yùn)生產(chǎn)中的實(shí)際應(yīng)用。
責(zé)任編輯:xj
原文標(biāo)題:KUKA工業(yè)機(jī)器人搬運(yùn)編程與操作(下)
文章出處:【微信公眾號(hào):PLC技術(shù)圈】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
-
編程
+關(guān)注
關(guān)注
88文章
3680瀏覽量
94867 -
工業(yè)機(jī)器人
+關(guān)注
關(guān)注
91文章
3446瀏覽量
93733
原文標(biāo)題:KUKA工業(yè)機(jī)器人搬運(yùn)編程與操作(下)
文章出處:【微信號(hào):xue_PLC,微信公眾號(hào):PLC技術(shù)圈】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
EtherCAT科普系列(7): EtherCAT技術(shù)在工業(yè)機(jī)器人控制系統(tǒng)領(lǐng)域的應(yīng)用

KUKA機(jī)器人使用說(shuō)明書(shū)
工業(yè)機(jī)器人工作站的建設(shè)意義
庫(kù)卡KUKA機(jī)器人常見(jiàn)故障維修
KUKA機(jī)器人編程說(shuō)明(英文)
發(fā)那科ROBOGUIDE機(jī)器人仿真助手入門(mén)

agv搬運(yùn)機(jī)器人是怎么實(shí)現(xiàn)無(wú)人搬運(yùn)的?

搬運(yùn)碼垛機(jī)器人的特性和運(yùn)用方式
工業(yè)機(jī)器人常用的編程方式
智能移動(dòng)機(jī)器人

SLAM激光導(dǎo)航 地牛式AGV機(jī)器人,“7*24小時(shí)”玩著工作!

復(fù)合機(jī)器人倉(cāng)庫(kù)搬運(yùn)方案

AGV搬運(yùn)機(jī)器人:智能物流的得力助手
工業(yè)機(jī)器人仿真軟件有哪些
Kuka機(jī)器人配置Profinet通訊網(wǎng)關(guān)HT3S-PNS-ECS






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論