 EtherCAT科普系列(7): EtherCAT技術在工業機器人控制系統領域的應用
EtherCAT科普系列(7): EtherCAT技術在工業機器人控制系統領域的應用
傳統意義上的機器人可以分為服務型機器人和工業機器人。工業機器人作為機器人家庭中的成員,是目前世界上應用較多和發展前景最為廣闊的一類。工業機器人按照機械結構可分為多關節機器人、平面多關節(SCARA)機器人、并聯(DELTA)機器人、直角坐標機器人、圓柱坐標機器人以及協作機器人。廣泛應用于搬運、上下料、焊接與釬焊、裝配與拆卸、潔凈室、涂層、封膠、加工領域等工業場景。

▲主要工業機器人類別(來源:TE智庫)
隨著國家戰略的不斷推進,工業機器人的自主研發上升到了一個全新的高度,工業機器人進入快速發展階段。IFR、中國電子學會統計數據顯示,2023 年中國工業機器人市場的總出貨量為30.9萬臺,同比增速為6.6%;市場規模約692億元,同比增長14%。預計未來五年,伴隨著3C消費電子需求持續回暖,以及新能源汽車、鋰電、光伏等新能源產業的周期性調整,中國工業機器人市場預計將保持 5%-10%的增速持續增長。
工業機器人系統組成
工業機器人系統主要包括三大部分:主控單元、執行機構和檢測裝置。
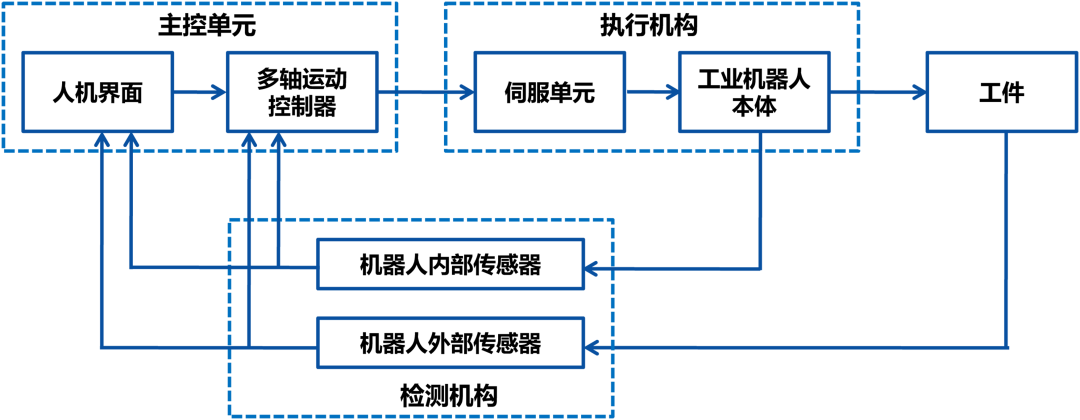
▲典型工業機器人系統結構
1)主控單元是整個機器人系統的核心,主要包含了運動控制器和人機界面,人機界面大多采用觸摸屏和手操器用于接收用戶輸入實現參數的設定,同時顯示機器人的姿態、位置等信息。運動控制器是整個控制單元的核心,其需要完成反饋信息的處理正逆運動學計算、軌跡規劃、插補算法,也就是運動控制器會根據感知系統反饋的信息和用戶設定計算出執行機構的控制量,并下發到執行機構。
2)執行機構類似于人體的手腳部分,主要包括工業機器的機械部分和伺服單元。其中伺服單元采用伺服驅動器+伺服電機,伺服驅動器與運動控制器直接相連,用于接收運動控制發出的控制信息,然后控制伺服電機依給定的加速度和速度完成給定的位置,伺服電機與機器人的機械臂相連,帶動機械臂完成指定的動作。
3)檢測裝置為機器人的感知系統,用于對執行機構位置量等信息進行采集,然后反饋到控制器,使用相關控制算法調整控制器的輸出信號。感知系統可分為內部檢測裝置和外部檢測系統,內部檢測裝置大多集成在伺服電機和伺服驅動中,通過編碼器反饋相關檢測量,并且在執行機構內部已經構成了閉環系統,實現伺服服驅動器的脈沖產生數等于給定脈沖數。外部檢測裝置主要是視覺系統,該系統可獲取工件位置信息。機器人的精度與感知的檢測精度密切相關。

▲典型工業機器人工作原理(來源:埃夫特)
在整個工業機器人系統中,控制系統是工業機器人的“心臟”,控制系統的好壞直接決定了機器人性能的優劣,在機器人技術中具有至關重要的地位。
隨著工業機器人應用領域和范圍的不斷擴展,為了滿足各種工藝,工業機器人對控制系統開放性要求越來越高,要求支持各種輸入輸出,多種控制任務;方便功能模塊的增減,使系統容易集成和擴展。另外,實時性也是控制系統的一個重要指標,很大程度上影響工業機器人的作業精度。
工業機器人的控制系統與驅動設備之間時離不開大量的數據和信息傳遞。傳統的現場總線已滿足不了高性能機器人對于通信的需求,工業以太網技術為機器人通信提供了全新的選擇。工業以太網高速實時同步的通信性能讓機器人通信水平邁上新的臺階,使機器人技術進入一個全新階段。
EtherCAT是工業以太網技術之一,具有傳輸速率快、多軸同步性高、實時性好等特點,具有廣闊的應用前景,適用于多軸運動控制領域,與工業機器人對通信網絡所提出的高實時、高同步、高帶寬、高靈活性等要求十分契合,使得EthcrCAT成為目前工業機器人通信的首選技術。
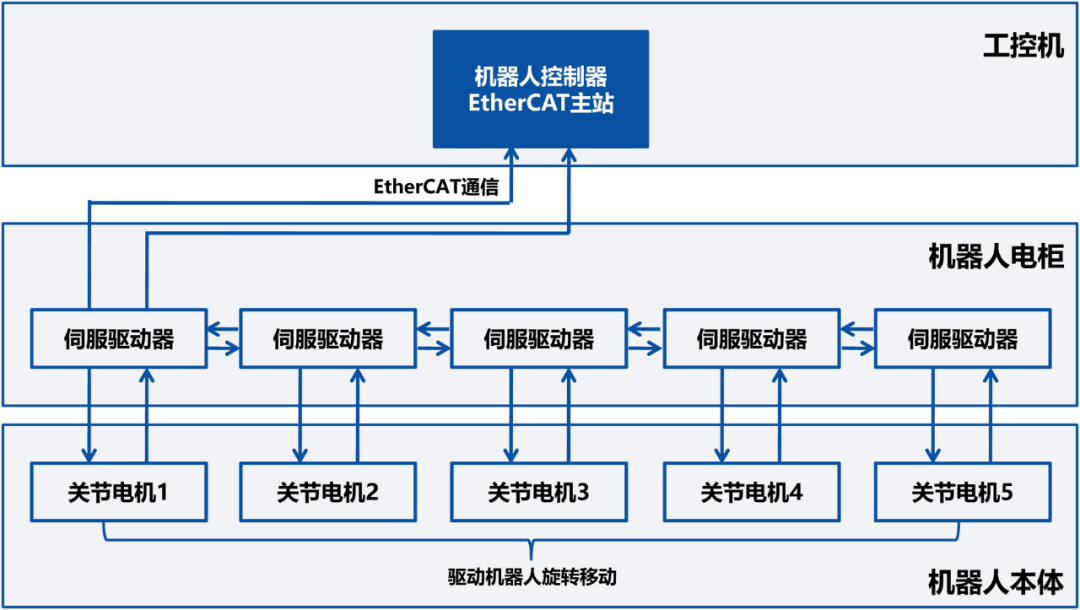
▲基于EtherCAT通信的工業機器人系統組成
EtherCAT技術目前在全球范圍內推廣,憑借其優越的性能,深受機器人控制、汽車和移動設備及嵌入式系統等開發單位喜愛,在眾多領域已有了廣泛的應用。許多企業包括倍福、KUKA、ABB、安川以及歐姆龍等對EtherCAT進行了深入研究,并且推出了較為成熟的 EtherCAT產品,且已應用于工業現場。
EtherCAT通信的工業機器人控制系統硬件組成
典型的EtherCAT通信的工業機器人控制系統硬件主要由基于嵌入式微處理器的主站和基于EtherCAT從站控制器ESC的從站組成。
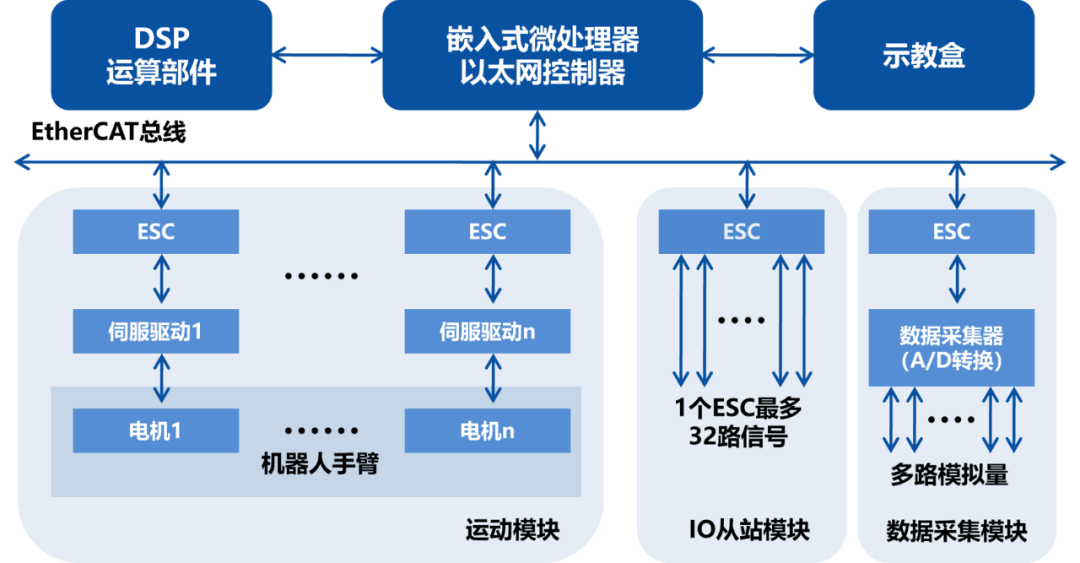
▲典型EtherCAT通信的工業機器人控制系統硬件結構
整個機器人控制系統采用EtherCAT協議實現控制器與各模塊間的通訊。系統可以根據需求任意增減硬件模塊,組成各種拓撲結構,可擴展多個控制器實現多機器人作業系統。系統由EtherCAT主站和EtherCAT從站組成,從站分為運動控制模塊、I/O模塊和數據采集模塊等。
EtherCAT主站采用嵌入式微處理器來控制調度整個系統的運行,主要管理EtherCAT狀態機以及運動控制。
示教盒作為主站的輔助工具,主要起離線路徑規劃及示教作用。
DSP作為主站的協處理器,主要完成運動軌跡的插補。
EtherCAT從站由EtherCAT從站控制器ESC(EtherCAT Slave Controller)實現的。
從站控制器ESC提供3種PDI接口:微處理器接口、SPI接口、I/O接口。ESC是采用ASIC或FPGA實現的運動模塊具有EtherCAT接口,由多軸伺服電機組成一支機械手以完成實際任務,可選擇不同的工作部件,附著在機械手末端完成各種工作。
IO模塊直接由從站控制器ESC自身的IO資源實現輸入輸出控制,一個IO從站最多支持32路IO信號。數據采集模塊則是加了一個AD轉換器。
EtherCAT從站負責數據通信和過程控制,從站設備既可以是簡單的IO設備,例如帶有 EtherCAT 接口的傳感器,也可以是復雜的設備,例如伺服驅動器。EtherCAT 從站系統組成包括從站微處理器、從站控制器、EEPROM 和標準的以太網物理層器件。
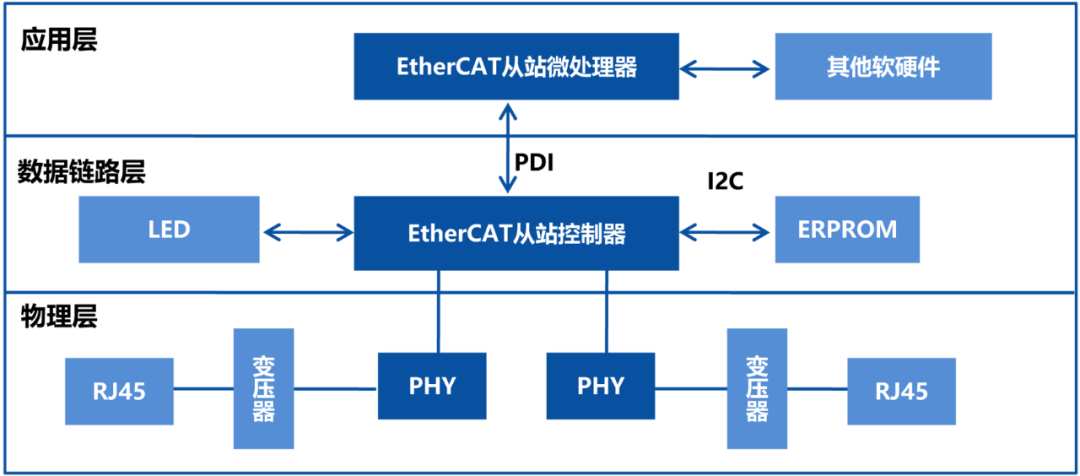
▲典型EtherCAT從站設備組成
碼靈半導體工業機器人控制系統EtherCAT通信解決方案
EtherCAT從站控制器用于實現EtherCAT協議的實現以及數據幀的處理工作,是整個從站實現EtherCAT通信的核心。碼靈半導體提供的CF110x系列ESC芯片為EtherCAT從站開發提供了高性價比的優秀解決方案,滿足工業機器人在各種復雜工藝下,控制系統對通信總線的要求:
1)可靠的通訊:適合復雜的工業現場環境;
2)數據傳輸的實時性:響應時間通常在0.5~10ms,以達到工業機器人的實時控制需要;
3)命令執行和狀態反饋的同步性:各坐標軸需要較高的同步運動精度,保證各軸在收到命令后在同一時刻執行位置控制指令和同時采樣位置信息
;4)開放性好:總線應支持的多種拓撲結構,滿足不同需要,同時方便集成和擴展。
碼靈半導體推出的CF110x系列最多可以提供3個數據收發端口,使從站能夠靈活的實現各種拓撲結構,內部含有8個FMMU單元,8個SM通道,4KB控制寄存器,8KB過程數據存儲區,支持64位分布式時鐘功能,其中8KB過程數據存儲區是DPRAM,用于和微控制器交換數據。CF110x系列提供了三種過程數據接口:數字量IO接口、SPI接口和8/16位異步微控制器接口(μC8/16),其中SPI和μC8/16用于連接外部微控制器,組成復雜的從站設備。
可選擇性集成2個10M/100Mbps以太網PHY,兼容100BASE-TX,或32位ARM Cortex-M3內核微控制器(MCU),既能支持簡單數字處理的設備,又能用于處理復雜信號的設備。
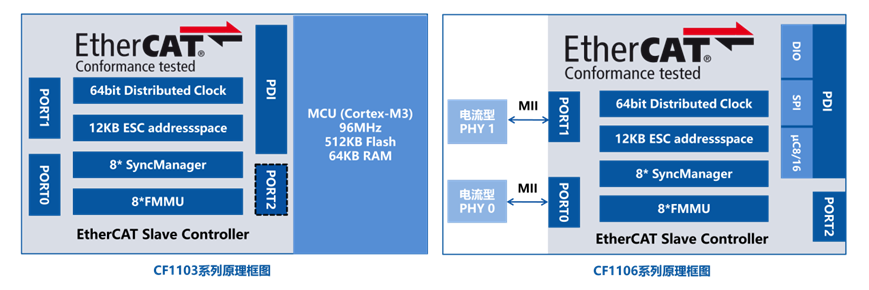
▲碼靈半導體CF110x系列芯片結構框圖
▲碼靈半導體CF110x系列芯片實物圖
同時支持CoE、EoE、FoE、SoE等EtherCAT應用層協議,適合作為所有類型的 EtherCAT 設備的通用解決方案,包括伺服電機驅動器、步進電機驅動器、變頻器、工業機器視覺、工業通信模塊/接口卡、遠程I/O、工業網關等工業機器人及其他工業自動化領域。
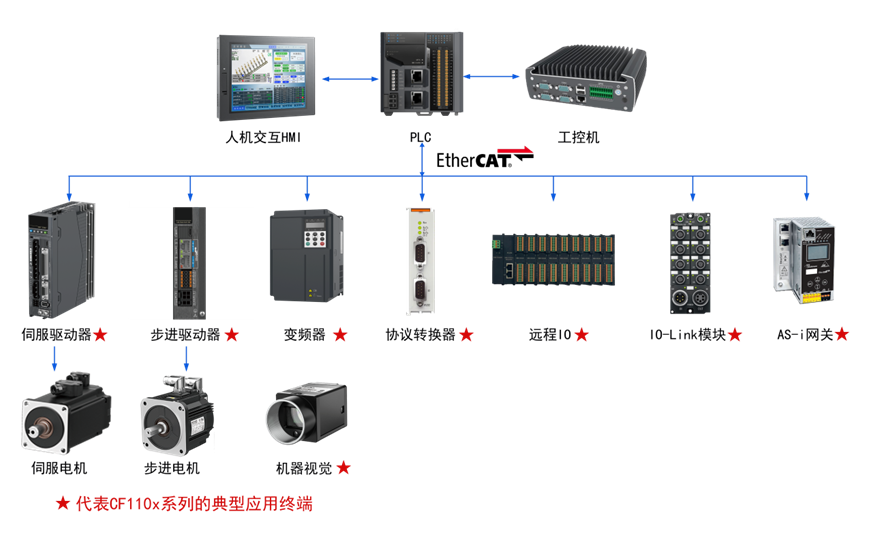
▲碼靈半導體CF110x系列芯片典型應用領域
隨著機器人控制技術在工業方面的應用范圍不斷拓寬,對控制任務和控制功能的需求也變得廣泛和復雜。為適應工業生產制造的發展,采用實時以太網技術EtherCAT來構建工業機器人的控制通信系統具有很大的優勢。基于碼靈半導體CF110x系列EtherCAT芯片開發的通用性工業機器人控制系統,可有效降低生產成本,縮短研發周期,對普及工業機器人和提高工業生產效率具有重要意義。
-
控制系統
+關注
關注
41文章
6752瀏覽量
111783 -
工業機器人
+關注
關注
91文章
3442瀏覽量
93713 -
ethercat
+關注
關注
19文章
992瀏覽量
39608
發布評論請先 登錄





 工商網監
工商網監
評論