仿人機器人一直是自動控制領域研究的熱點。在模仿人類進行邁步行走時,由于仿人機器人的重心經常要處于中心線以外的區域,使得它的身體很難保持站姿平衡,能夠穩定地實現雙足行走是仿人機器人研究的重點也是難點。
2011-01-23 16:42:37 1606
1606 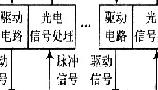
普渡科技在其春季新品發布會推出全新服務機器人,其中為解決餐廳用餐高峰期配送難題而打造的機器人“巧樂送”和應對復雜地形設計的行業首款四足配送機器人D1.
2022-03-29 16:51:082365 
采用GPT的代碼生成能力自行生成控制方案等,甚至市面上已經開始出現落地產品。 ? 四足機器人 ? 前不久,宇樹推出了全新的智能四足機器人產品,Unitree Go2。宇樹作為國內較早帶火消費級四足機器人的公司,在Go1推出兩年之后終于發布了后續產品。
2023-07-20 01:13:001910 `剛開始做機器人,實物圖`
2013-11-25 11:36:20
第三章、雙足機器人的硬件結構與框圖一、雙足機器人的硬件框圖圖1. 雙足機器人結構框圖
2013-11-25 11:30:18
布局、人員位置等,在工業物聯網場景中監測生產設備的狀態、檢測產品質量等。
通信技術應用
遠程控制與數據傳輸:宇樹科技的人形機器人H1等產品具備遠程控制和數據傳輸功能,這依賴于先進的通信技術。在物聯網
2025-02-04 06:48:00
搭載機器人制作入門機器人DIY系列雙足步行機器人DIY輕輕松松制作機器人雙足步行機器人制作入門青少年科技創新叢書ROBOTC與機器人程序設計樂高:實戰EV3/青少年科技創新叢書Java與樂高機器人機器人
2015-02-22 07:34:56
機器人的定義是什么?機器人優點和缺點是什么?機器人是由哪些部分組成的?工業機器人的應用有哪些?
2021-07-05 06:48:21
波士頓動力創始人Marc Raibert 1986年的書,足式(腿式)機器人開山之作,研究集中在平衡和動態控制的核心問題上
2017-12-11 10:22:52
去年 1 月份,瑞士公司 ANYbotics 放出來一款靈活的四足機器人——ANYmal,它可以對抗各種惡劣的現實環境,適用于在危險的工業場景中執行任務。在最近的世界機器人大會上,ANYbotics
2021-12-31 06:28:53
本帖最后由 colorsky 于 2016-4-21 14:05 編輯
大家好,我是ColorSky。這是我的雙足機器人的開源項目。先發出視頻給大家看看,后面陸續會把技術資料上傳。機器人鞠躬動作機器人舞蹈1視頻機器人跳機器舞視頻
2016-04-21 10:51:28
中應用的傳感器種類繁多,例如視覺傳感器、電子羅盤、加速度計和超聲波傳感器等都是仿人機器人中常用的傳感器。DF-1機器人是我院自主研制的一款仿人機器人。本文首先對DF-1機器人總系統進行了介紹,然后
2019-09-18 06:17:46
求大神指導怎么做多足機器人的行走的動畫演示!!!
2017-04-23 11:36:56
用labview如何編寫六足機器人三足步態的程序?主要的依據和原理是什么呢?求指教!
2016-08-04 19:21:05
)仿生六足機器人開發流程以及細節仿生六足機器人三維模型簡圖論文、D-H數學模型 、程序、硬件原理圖至附件下載
2014-03-27 18:51:05
個可以在平坦地形快速移動的小型雙足輪機器人,它能夠通過跳躍來翻越障礙。本文給出了機械設計以及系統整體的結構,同樣也給出了應對不同場景的多種控制器的開發。在最終的原型機進行了一系列實驗,驗證了這些行為在
2021-08-30 07:26:06
申請理由:關于六足機器人,基本上是用18個舵機一起使用來驅動六足完成相應的動作組,而一般的89C52以及STC12系列的單片機只能讓六足機器人做簡單的動作,無法完成相應的創新。所以能有一塊STM32
2015-11-25 15:35:26
申請理由:我是在校大學生,大三,在學校的創新團隊搞研發,今年5月份申請了省級項目---基于物聯網的六足爬行機器人,并且已經審批通過了。正在設計制作此項目。我們發現,現在的機器人都收到空間的局限性
2015-08-09 17:12:20
申請理由:項目描述: 現有一個六足機器人平臺,但是沒有心儀的開發板來控制,之前有用過STM32F4的單片機。F412ZG的定時器豐富,IO口數量充足,具有各類通信外設,十分適合做六足機器人的控制開發
2016-11-14 18:54:33
申請理由:手頭有個畢業設計是采用stm32的。。想試著換換主控。來作為六足機器人的主控板。。32雖然夠用。但是畢竟爛大街。。正好試試學著用用其它款單片機。項目描述:使用申請的開發板做主控。用
2015-07-17 16:53:26
申請理由:我正在做這樣一個機器人,遇到了很多問題,非常想學習一下這款板子!我相信利用它能幫我解決難題!項目描述:可利用四足機械結構仿生行進,也可利用車輪進行行進,集四足機器人越障能力強和輪式機器人行動迅速的特點于一身,具有良好的復雜環境地形適應性,可用于災區偵查、救援。
2015-06-25 19:38:19
申請理由:大學時期所學習的各種課程總是理論性較強,為了是同學們能夠親身體會所學習各科的實用性的必要性,我們選擇了設計制作雙足行走機器人,在制作過程中讓理論與實際結合,讓同學們體會到控制理論,代碼編寫
2015-11-30 15:57:04
傳感器。四足機器人重2.2kg,有8個自由度,四條腿上都搭配了足底傳感器。其他零件由3D打印和現成的零件構成,可以做出重量輕且低成本的機器人,這也使得其他研究團隊可以快速開發和復制此項目。本文系統地描述了
2021-09-13 06:33:53
多自由度人形雙足舞蹈機器人套件檢測教程——機器人開發系列配套資料:https://www.fengke.club/GeekMart/su_fV1WzKsGQ.jsp 配套視頻:https
2022-04-22 14:14:08
多自由度人形雙足舞蹈機器人——瘋殼·機器人開發系列套件檢測教程內容簡介本文檔主要介紹在如何驗證多自由度人形雙足街舞機器人套件正常,包括具體線路連接,實驗現象驗證。具體分為以下幾個步奏。1、機器人
2022-08-12 15:55:14
`(不太會用論壇的發帖來編輯,圖片的位置都在最后面,附件里有技術報告)一、項目設計背景及概述雙足步行機器人是機器人研究領域的熱點,它集機械、電子、計算機、仿生學、自動控制、多傳感器及人工智能等多門
2014-01-02 14:31:52
龍人四足機器人是一種仿生機器人,由Openduino控制板控制,有四條腿,每條腿兩個自由度,由兩個舵機驅動,能實現兩種步態行走。配有三個超聲波,實現大角度智能避障。標準演示程序有5個可愛的表演動作。重要技術點: 四足機器人的行走步態設計、舵機的梯形速度控制、多路舵機的協調控制
2016-03-24 16:17:53
生活。本次塔米公司參展家博會的主題是智能改變生活,為了給現場的朋友們帶來一場前所未有的智能機器人盛宴。塔米這次攜旗下拳頭產品重裝參展,不僅有湖南衛視金鷹節人氣明星小羅機器人,還有即將發布的全球首款擁有智慧
2015-03-02 13:55:33
求大神上傳一個六足機器人的骨架圖紙
2014-07-28 10:32:54
誰會做六足機器人,求資料??大神們
2013-06-06 00:01:39
`這是創客集結號的作品四足機器人身體和四足都是通過3D打印技術打印出來的,通過自己安裝連接上超聲波傳感器,制作成功的四足機器人完全就很了。`
2018-09-29 09:55:09
四足機器人屬于復雜機電系統,需要綜合生物、機械、電子、控制等學科內容,具體涉及仿生機構設計、靈巧運動機構設計、高性能驅動器制造,行走穩定性控制、強化學習等在內的多個研究方向。其中,機構設計是保障四足
2021-09-15 06:54:01
本帖最后由 紅塵。破 于 2016-8-19 14:59 編輯
今天整理資料時發現了一年前做的四足仿生機器人,當時買了一個四足仿生機器人的骨架,畫了個板子,寫了個測試代碼,能完成簡單的行走,后面加了避障、顯示功能啥的,不過視頻資料沒了,只有簡單行走的視頻,優酷鏈接在下面評論
2016-08-19 14:59:33
本帖最后由 eehome 于 2013-1-5 10:08 編輯
四足步行機器人的彎道行走
2012-08-12 09:53:57
`最近這段時間做了一個基于樹梅派的視頻監控機器人平臺 Verybot 照片如下: 這個平臺的基本組成是:1、樹梅派 ( Raspberry pi ) 嵌入式計算機;2、USB無線網卡( wifi
2014-01-21 21:17:04
通過安芯一號控制雙足機器人腿部關節六個舵機的角度以及轉動角速度,使機器人完成行走,翻滾,原地360等動作。機器人在規定區域內向前走,通過傳感器找到動作區,完成一系列動作;并且可以通過串口與PC機時時通信,傳回機器人的參數
2013-09-28 18:58:35
的工作可以進一步研究和解決氣動人工肌肉及關節的建模和控制問題,為設計和搭建基于氣動人工肌肉驅動器的雙足機器人打下基礎。 1 氣動人工肌肉關節系統軟硬件設計 1.1 氣動人工肌肉 McKibben
2012-12-06 15:32:52
如何完整的組裝四足機器人?
2021-09-24 07:00:54
如何設計一款球上自平衡機器人?
2022-02-22 07:39:46
如題。在論壇有看到家用機器人的2014年度十大款類型。比較感興趣,不知道有沒有大神了解比較全面的家用機器人知識?
2015-02-11 11:16:00
有很多小伙伴喜歡在沒事的時候鼓搗一些機器人什么的,現在給大家分享一個仿生機器人開源資料,喜歡的小伙伴可以看看。六足機器人系統基于仿生學原理,采用六足昆蟲的機械結構,通過控制18個舵機,采用三角步態
2020-10-10 09:57:11
款機器人中一款由山土科技研發的小二管家機器人引起了極大關注,所得票數占總票數的26%,以排名第一的身份獲邀參加機器人總動員展示及交流活動。張江發布團隊連夜策劃將發布場地換為商業廣場,讓廣大市民能夠
2016-05-04 23:52:32
怎么實現六足機器人的設計?
2021-11-22 08:02:22
基于STC15/LPC845的四足機器人是由哪些部分組成的?怎樣去制作一款基于STC15/LPC845的四足機器人?
2021-09-26 08:46:16
機械昆蟲-六足爬行機器人
2014-08-30 15:38:26
`業余,想想做一做六足機器人。但是苦于無大致圖紙,卡在建模的問題上。求六足機器人的圖紙,有清晰的尺寸就行(主要是腿)。`
2019-03-26 18:43:17
求契貝謝夫四足機器人的各部件尺寸
2013-11-27 15:42:51
`蘋果公司在周一的發布會上低調曝光了他們研制的第一款機器人—— Liam。這款機器人,主要是用于 iPhone 手機的回收。這是具體怎么做到的的?`
2016-09-02 10:53:45
本人新手,最近在準備制作一個六足機器人,如果利用舵機控制器+遙控手柄套件的話,可以很容易就實現簡單的功能。為了能讓六足機器人實現更加復雜的功能,我想利用arduino+樹莓派+舵機控制器的方式。這樣
2015-11-10 15:33:17
的Arduino來編程。所有這些功能讓蟲蟲的行走更加復雜,互動更加豐富。可以實現前進、后退、避障拐彎、巡光等功能。簡單的組裝讓你了解最基本的機器人原理和智能控制。喜歡DIY的用戶,還可以在原有代碼的基礎上改造出自己的互動模式。所以,其實打造一款機器人并沒有那么難啦。六足蟲蟲機器人實物展示:
2016-08-02 14:43:18
龍人六足機器人是有六條腿的仿生機器人,每條腿有兩個自由度,由兩個角度舵機控制。控制器采用Stm32機器人控制器,通過編程控制實現12個電機協調的控制行走,實現對六足昆蟲的仿生模擬。頭部有三個超聲波,實現大角度范圍的避障。重要技術點:六條腿協調前進 、后退、轉彎的算法,超聲波導航和避障
2016-03-23 17:49:48
龍人六足機器人龍人六足機器人是有六條腿的仿生機器人,每條腿有兩個自由度,由兩個角度舵機控制。控制器采用Stm32機器人控制器,通過編程控制實現12個電機協調的控制行走,實現對六足昆蟲的仿生模擬。頭部有三個超聲波,實現大角度范圍的避障。重要技術點:六條腿協調前進、后退、轉彎的算法,超聲波導航和避障
2016-03-24 16:25:46
雙足機器人的起立動作是雙足機器人步行之前重要的基本準備動作,本文通過連桿結構分析一種雙足機器人的起立方法,主要分析了起立過程的動作規劃,分階段計算出使機器人
2010-01-13 14:52:29 35
35 邁步機器人H系列 是全球首款采用柔性驅動器作為動力輸出的外骨骼機器人。首創柔性驅動器作為動力輸出,實現主動式康復訓練專利生物力學模型分析步態,為用戶提供精準、智能、個性化的康復訓練方案前瞻性、多中心、隨機對照注冊臨床試驗,超百例樣本量,充分驗證有效性和安全性
2023-09-20 17:25:48
設計了一款低成本的小型雙足 機器人 研究平臺。根據仿生學原理確定機器人的比例尺寸,根據機器人的功能要求確定其自由度配置, 選擇了合適的材料和驅動元件,實現了一個小型的雙
2011-06-07 18:36:31128 悟空、悟能雙足機器人教程
2016-12-20 22:43:358 兩臺機器人分別被命名為BALLU(浮力輔助輕量級腿部單元系統)和NABiRoS(非擬人兩足機器人系統),雖然它們的造型有些奇特,但是兩款機器人都代表了科研機構對于機器人運動新的探索。
2016-11-21 17:36:55989 基于靜態平衡的四足機器人斜面步態規劃_張文宇
2017-03-16 08:00:003 6自由度機器人 雙足竟步機器人研究報告 加代碼
2017-04-10 11:19:1266 雙足步行機器人---直立行走,其有著良好的自由度、動作靈活、自如、穩定。雙足機器人是一種仿生類型的機器人,能夠實現機器人的雙足行走和相關動作。
2018-08-10 09:26:0317329 Cassie是在另一款雙足機器人ATRIAS基礎上研發的,但ATRIAS的外形像BBC著名科幻電視劇《神秘博士》(Doctor Who)中的機器人“戴立克”(Dalek),而Cassie更像是《機械戰警》中的兩足機器人“ED-209”。
2018-11-08 16:46:072150 雙足機器人Cassie,一直以其獨特的腿部造型,與輕盈的步態備受機器人界的關注。人們甚至認為這種先進的行走步態和Atlas相比并沒有遜色很多,只是空有一雙大長腿,總是感覺怪怪的。不過,從Agility Robotics最新公布的消息來看,近日Cassie終于長出了上半身,并取名為Digit。
2019-03-04 11:10:076541 兩年前,波士頓動力(Boston Dynamics)就發布了初代 Handle。它是波士頓動力研發的首款「足 + 輪」式機器人,能跑,能跳,能搬運。但和公司其他蹦蹦跳跳、甚至還能翻跟頭的「同事」相比,Handle 的光芒黯淡不少。
2019-04-01 10:17:36936 最近四足機器人開始頻繁的進入大眾視野,相比傳統的輪式、履帶式以及雙足機器人,四足機器人在面對復雜地形時,擁有更高的機動性、更強的穩定性,在軍事任務、搶險救災、地形勘探等多領域,展示出更加強大的能力。
2019-06-07 11:32:004188 近日,中國機器人初創公司杭州宇樹科技有限公司(Unitree Robotics)在官網上發布了四足機器人“萊卡狗”(Laikago)的視頻,視頻中可以看到,8輛“萊卡狗”合力竟然拖動了一輛載人面包車。
2019-08-15 15:09:0216653 雙足步行機器人是真正字面意義上或狹義的“機器人”,其研究和發展代表了機器人學的尖端水平。其中最重要的概念是零力矩點(Zero-MomentPoint,簡記ZMP)。本文基于雙足步行機器人ZMP控制與動力學模型,取得了以下主要的研究成果: 首先,本文分析了雙足機器人動態步行過程的運動學特征。
2019-12-31 16:51:0031 1月6日,據外媒報道,美國創業公司Agility Robotics宣布其雙足機器人Digit現已開售,這是一款可以應用在物流行業(包括上下樓梯)的雙足機器人產品。
2020-01-06 15:27:42945 1月6日,據外媒報道,美國創業公司Agility Robotics宣布其雙足機器人Digit現已開售,這是一款可以應用在物流行業(包括上下樓梯)的雙足機器人產品。
2020-01-06 15:29:593169 美國機器人公司Agility Robotics剛剛開售其首款兩足機器人Digit,汽車巨頭福特成為其首位客戶,該公司自2019年5月以來一直在測試這款機器人的送貨上門功能。
2020-01-08 10:27:36857 仿人雙足機器人是機器人研究的前沿領域,是多種科技的結合,代表一個國家的技術水平。仿人雙足機器人最大的特征就是雙足步行,因此它的靈活性很高,可以代替人類完成危險作業。
2020-01-15 10:31:0020 足式機器人的運動具有足與地面非連續接觸的特點,這使得它對不平路面環境的適應性較強,可以應用在探險救災等危險的任務中。與四足及六足機器人相比,雙足機器人足部與地面的接觸支撐面積較小,使其具有更高
2020-01-17 14:19:5415 年的歷史,但是由于它獨特的適應性和擬人性,成為了機器人領域的一個重要發展方向。課題旨在設計一種雙足人形機器人平臺,在此基礎上對雙足機器人的步行機理進行研究,為進一步設計自主的智能雙足人形機器人積累經驗。本文首先
2020-03-12 16:15:0015 雙足步行機器人是一種仿人機器人,是移動式機器人領域中一類重要的仿生系統。雙足步行機器人作為一種移動式機器人,它與輪式,履帶式機器人相比有許多優點與優越性。由于雙足步行機器人的行走具有獨特的適應性
2020-04-01 17:10:0020 對各種行走環境的較強適應能力是雙足步行的一個重要性能,這也是雙足機器人相對于輪式機器人的優點之一。樓梯是人類生活環境中常見的行走環境,具有爬樓能力是雙足機器人應具有的基本功能。本文針對雙足機器人
2020-04-07 16:27:3233 大力推動的科研領域,特別是雙足機器人,目前已成為機器人產業重點關注的焦點之一。身為雙足步行機器人控制核心模塊,控制系統設計的優劣程度,直接性的決定著機器人各個方面的性能。雙足步行機器人具備結構復雜、實時性要求高以
2020-04-28 08:00:0027 機器人Unitree A1吸引了很多觀眾的目光。 宇樹科技(Unitree)在高交會現場展示最新研發上市的四足機器人Unitree A1,吸引了很多觀眾。 AlienGo與A1是宇樹科技今年初最新上市的四足機器人,主打教育科研與娛樂酷玩。宇樹科技區域銷售總監萇瑞春對澎湃新聞記者
2020-11-12 11:45:085138 ohealth h1 OPPO正式發布首款面向家庭用戶的智能健康概念產品——OHealth H1 家庭智能健康監測儀。基于OPPO自研技術,OHealth H1實現了醫療級精度的體溫、心電、心率、血
2023-01-04 11:39:041054 他機器人互補作業以滿足這些需求,讓電力巡檢更智能、更高效。 宇樹科技作為國內外知名的四足機器人研發企業,早在2017年就在全球范圍內率先開展四足機器人的落地應用,其中在巡檢行業已開展多方合作并取得優異成果。憑借
2023-03-07 14:07:151236 
5月16日,由國務院抗震救災指揮部辦公室、應急管理部、云南省人民政府,在云南麗江聯合舉行了“應急使命·2023”高山峽谷地區地震救援演習。在此次演習中,宇樹四足機器人B1再度亮相,作為現場焦點,協同
2023-05-23 17:12:451080 科技創始人王興興作為國際知名機器人專家之一,應邀參加了世博中心高峰論壇,并在“高峰對話——人形機器人未來發展CEO共話”中發表了獨特的見解,引起了業內外的廣泛關注和討論。 本次大會現場,宇樹展示了工業級四足機器人B1、靈巧機械臂Z1和
2023-07-08 10:47:40888 的科技新品伴隨仿生機器人Go1,這一發布立即引起了全球范圍內的廣泛關注和熱烈討論。作為領先的科技創新企業,宇樹再次強勢登場,引領行業的進步!Unitree Go2四足機器人配備了先進的配置和時尚的外觀,同時還擁有豐富的交互功能。它模擬真實寵物狗的行為非常逼
2023-07-13 16:48:521693 “大圣”面向國內日益升溫的雙足機器人科研教育與產業探索需求,填補大尺寸仿鴕鳥構型雙足機器人產品空白,作為一款高性能與高拓展性的科研教育平臺,為用戶提供廣闊的想象空間。
2023-08-08 17:12:051342 
發布會,正式發布遠征A1智能機器人。“遠征A1”是人工智能技術與機器人實體相結合;具備雙足行走、智能任務、人機互動等領域的能力。 稚暉君輪足機器人“遠征A1”的下肢采用雙足,輪式,輪足等不同的設計,可實現不同應用場景下更換配置;而且上肢
2023-08-18 18:42:252605 
樂聚機器人在12月5日發布了一款名為“夸父”的全新機器人產品。夸父機器人被譽為國內首款開源鴻蒙人形機器人,具備跳躍能力且適應多種地形。
2023-12-05 16:38:051749 大家好,歡迎收看河套IT WALK第129期。 宇樹科技,發布了旗下首款雙足機器人 H1;新型超級計算機正在模擬人腦,探索著 AI 與神經科學的深度融合。伴隨著科技的力量,我們相信,人類和機器的對話
2023-12-20 09:45:01433 
2024年3月19日,英偉達CEO黃仁勛在美國加州圣何塞SAP中心發表主題演講《見證AI的變革時刻》,正式拉開了2024年英偉達GTC大會的序幕。 宇樹(Unitree)通用人形機器人H1在大會亮相
2024-03-20 14:55:19762 近日,宇樹科技發布了一款名為Unitree G1的新型人形機器人,再度展示了其在機器人領域的創新實力。這款機器人以其超大關節運動角度和多達34個關節的設計而備受矚目。
2024-05-16 09:50:24820 在人工智能與機器人技術的融合浪潮中,OpenAI支持的1X機器人公司近日震撼發布了其首款消費級人形機器人原型——NEO Beta。這款專為現代家庭量身打造的智能伙伴,以5英尺5英寸(約1米65)的身高和30公斤的輕盈體態步入公眾視野,展現了科技與生活的完美融合。
2024-09-03 16:20:58574 機器人Go2及其新型號Go2-W輪足版本以其出色的穩定性和靈活性吸引了眾多目光。這兩款機器人不僅具備卓越的越障能力,還能夠適應各種復雜地形,為用戶帶來前所未有的使用體驗。 此外,宇樹科技還展示了其工業級輪足機器人B2-W。這款機器人專為
2025-01-09 11:32:48810 近日,軟通天擎機器人公司在無錫正式發布了其首款雙足機器人——天鶴C1。這款機器人被精準定位在科研教育和交互服務兩大應用場景,旨在為用戶帶來全新的互動體驗和教育方式。 天鶴C1的核心競爭力在于其自主
2025-01-16 16:44:27560 近日,天創機器人公司正式推出了全球首款防爆人形機器人——“天魁1號”。這款機器人是工業智能運維領域的一項重要創新,為構建從發現問題到解決問題的能力閉環提供了重要基礎。 “天魁1號”采用了人形雙臂
2025-01-17 10:18:54437 1月22日,宇樹科技在官網更新了G1人形機器人首個應用方案——UnitreeG1-Comp,該機器人被官方稱為“為賽事打造的足球巨星”。G1-Comp不僅能在足球場上奔跑、轉身、轉圈,還能通過
2025-01-23 17:35:19454 電子發燒友網報道(文/李寧遠)幾日前,宇樹科技正式發布了Unitree G1基礎版以及EDU版的智能人形機器人,在市場上引起了關注。相比于它的綜合性能,其9.9萬元的基礎版本定價著實讓人吃驚
2024-05-19 01:39:004911 
記者和機器人成功握手。這款AI化身的人形智能體,售價9.9萬元起,展示了其靈活的關節設計,能夠輕松完成后退、轉身和握手等動作。宇樹科技還展示了首款具備360度全景感知能力的Unitree H1。 ??????? 圖1:宇樹科技Unitree H1 電子發燒友拍攝????? 圖2:宇樹科技機器
2024-11-16 00:59:003525 
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論