 電子發燒友App
電子發燒友App


雙足步行機器人---直立行走,其有著良好的自由度、動作靈活、自如、穩定。雙足機器人是一種仿生類型的機器人,能夠實現機器人的雙足行走和相關動作。作為由機械控制的動態系統,雙足機器人包含了豐富的動力學特性。在未來的生產生活中,類人型雙足行走機器人可以幫助人類解決很多問題比如馱物、搶險等一系列危險或繁重的工作。
一、機器人的結構設計
機器人的關節
雙足競步機器人的結構類似于人類的雙足,可以實現像人類一樣行走。本機器人采取了使用模擬舵機代替人類關節,實現機器人的步態設計控制。使用舵機控制芯片控制各個關節的動作,從而實現了對步伐的大小、快慢、幅度的控制。
用鋁合金或其他輕型高硬度材料來制作機器人的結構件,類似于人類的骨骼,從而來支撐機器人的整體。用輕型、有一定強度的材料(比如亞克力板)來制作機器人的頂板和腳板,模擬人類的胯部和腳掌從而來支持機器人的行走與穩定。因為行走是多關節配合的動作,機器人能獨立完成行走或其他任務。作為類人形機器人,本機器人采用六個舵機分別代替兩條腿的關節,其中一條腿的三個關節如圖 1 所示。
圖 1 雙足機器人的關節
圖 2 機器人關節的結構
舵機:使用舵機來代替關節活動。舵機的好壞決定了機器人行走的質量。選擇質量好,運行平穩,執行到位的常規舵機即可,結構件的尺寸與型號決定的關鍵是在于舵機的尺寸型號。
機器人的硬件結構
機器人的硬件結構如圖 3 所示。
圖 3 機器人硬件結構
結構件:用 2 mm 鋁合金板制作結構件來代替骨骼。材料選擇需注意:材料需滿足易切割,打孔。材料成型后不易形變。能支撐機器人重量。
腳板、頂板:使用 0. 5 mm 亞克力板制作機器人的腳板和頂板,來模擬人的腳掌和盆骨。
二、機器人控制器的設計
控制板相當于人的大腦對舵機發布指令控制機器人動作,本文采用 Atmegal 6 作為機器人的主控制板。ATmegal 6 基于增強的 AVR?RISC 結構的低功耗 8 位 CMOS 微控制器。由于其先進的指令集以及單時鐘周期指令執行時間 ATmegal6 的數據吞吐率高達 1 MIPS/MHz,從而可以減緩系統在功耗和處理速度之間的矛盾。
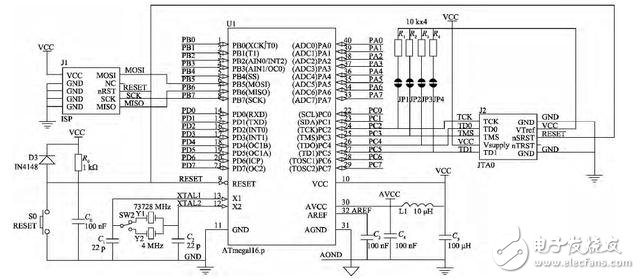
圖 4 機器人核心控制電路圖
三、軟件設計與調試
機器人工作流程
雙足競步機器人(窄足)的步態比較接近于人類正常行走時的步態,按照重心進行步態控制。為了方便程序的編寫和動作的調試,關節舵機的編號為 (0-5)號。編程為理想化編程,實際程序會和理想編程有所偏差,因此編程完成之后要進行多次動作的微調,機器人工作流程圖如圖 5 示。
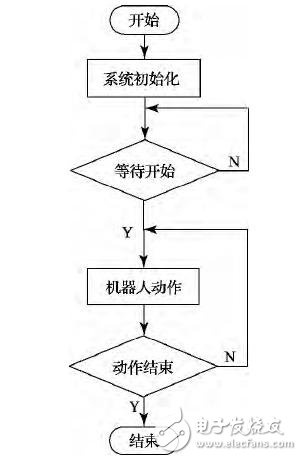
圖 5 機器人工作流程圖
機器人舵機是對稱安裝,在編寫代碼時要注意舵機的運動方向。機器人在反轉動作時不宜太快,太快可能會導致代碼不能完全讀出導致動作不到位使機器人出現摔倒的情況。








































 工商網監
工商網監
評論