 電子發(fā)燒友App
電子發(fā)燒友App


摘 要: 本文提出了一種實時模糊控制算法,并應用到基于CAN總線的運動控制系統(tǒng)中,且給出了系統(tǒng)的整體結(jié)構(gòu)和現(xiàn)場控制單元的設計方案。實驗結(jié)果表明,該控制系統(tǒng)具有實時性強、響應速度快、精度高的特點,在現(xiàn)場控制中有效可行。
引言
隨著模糊控制理論的發(fā)展,Takagi-Sugeno模型(簡稱T-S模型)的出現(xiàn)將模糊控制的研究推向了一個高潮。實踐證明,具有線性后件的T-S模糊模型以模糊IF~THEN規(guī)則的形式充分利用系統(tǒng)局部信息和專家控制經(jīng)驗,可以任意精度逼近實際被控對象。但是,由于T-S模型以及相應模糊控制器的建立需要確定較多的參數(shù)且推理復雜,使得該模型僅用于理論分析,實際使用的T-S型模糊控制器至今未見報道。現(xiàn)場總線技術(shù)的興起,改變了傳統(tǒng)控制系統(tǒng)的結(jié)構(gòu),形成了控制網(wǎng)絡。由于其適應了控制系統(tǒng)向智能化、網(wǎng)絡化、分散化發(fā)展的趨勢,因而顯示出強大的生命力,成為控制領(lǐng)域的熱點技術(shù)。
基于上述考慮,本文通過對T-S模型推理過程的簡化得到了一種實用的模糊控制算法,并將該算法與現(xiàn)場總線技術(shù)有機地結(jié)合起來,實現(xiàn)了基于CAN總線的實時模糊運動控制系統(tǒng)。
模糊控制器的設計
對于復雜被控對象而言,在系統(tǒng)局部信息或?qū)<铱刂平?jīng)驗可得到的情況下,通過系統(tǒng)辨識、經(jīng)驗歸納等方法得到多條規(guī)則作為T-S型模糊控制系統(tǒng)的參考規(guī)則庫。對于任意實時輸入,利用模糊模式識別技術(shù)在規(guī)則庫中尋找一條與該輸入最匹配的規(guī)則(控制規(guī)則中心),并以之為基礎,對整個參考規(guī)則庫進行動態(tài)簡化,從而得到控制量。其模糊控制系統(tǒng)如圖1所示。
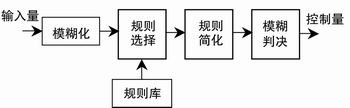
圖1 規(guī)則簡化的模糊控制系統(tǒng)
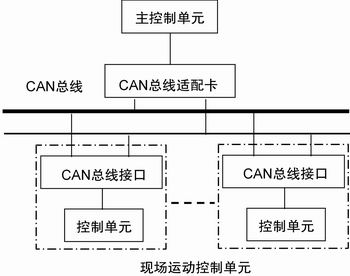
圖2 基于CAN總線的模糊運動控制系統(tǒng)
對于給定被控對象,考慮如下一組模糊參考規(guī)則:
(1)
其中,為輸入語言變量;是第i條參考規(guī)則中與前件輸入變量對應的語言變量值;為后件輸出量,是第i條規(guī)則的后件系數(shù)。將參考規(guī)則中的前件語言真值轉(zhuǎn)換為對應論域中的模糊數(shù)形式,則上述條規(guī)則可寫成如下矩陣形式:
其中,L是用模糊數(shù)表示的規(guī)則前件語言值;P是規(guī)則的后件系數(shù)陣;X、Y分別是輸入和輸出向量。
假設在任意采樣時刻K,系統(tǒng)實時輸入精確量為Xk=(x1k x2k L xnk),經(jīng)過模糊化,按照最大隸屬度原則,可得到一組輸入語言值XkL=(L1k L2k L Lnk)等價的模糊數(shù)形式為
XkL=(l1k l2k L lnk) (2)
下面,將從參考規(guī)則庫中尋找與該輸入組合最接近的規(guī)則,也即“控制規(guī)則中心”。
把矩陣寫成行向量的形式,即
L=(L1 L2 L Lm)T (3)
其中,Li=(li1 li2 L lin)稱為模糊模式。這樣,L矩陣確定了m個模糊模式。需要強調(diào)一點,m個模式應覆蓋整個系統(tǒng)的輸入輸出空間,也即模糊模型應該是完備的。
計算(3)式與每一模糊模式L之間的Euclid距離及最大Euclid距離,
(4)
采用最大隸屬度原則,即可求得“控制規(guī)則中心”;也就是說,如果存在mLa(XkL)=max[mL1(XkL), mL2(XkL), L , mLm(XkL)]則認為實時輸入XkL優(yōu)先隸屬于La模式,可得“控制規(guī)則中心”為Ra。其中,
為實時輸入關(guān)于模糊模式的隸屬度。
以規(guī)則Ra為基礎,可將參考規(guī)則庫簡化為
其中,b1,b2,L,bm為適當?shù)暮蠹壤禂?shù)。
考慮到實際輸入XkL與各模糊模式之間的差別,取,利用重心法解模糊,可得控制器的輸出為
(5)
其中,為第i條規(guī)則的前件強度。
上述簡化T-S型模糊控制器處理方法的優(yōu)點在于:
(1)突出了“控制規(guī)則中心”在整個控制器輸出中的基礎性作用,使得控制更符合專家經(jīng)驗。
(2)選用作為簡化規(guī)則的后件比例系數(shù),充分考慮了輸入組合與各模糊模式之間的不完全一致性。
(3)在線推理和運算工作量的減少,使控制器的實時性得到了提高。
需要注意的是,在(5)式中,變量系數(shù)會隨著實時輸入的變化而變化,原因在于不同的輸入對應著不同的“控制規(guī)則中心”。因此,從整體來看,該模糊控制器又是一個變結(jié)構(gòu)的控制器。
基于CAN總線的運動控制系統(tǒng)的實現(xiàn)
在雕刻機、數(shù)控機床、電動叉車、柔性制造系統(tǒng)等應用場合,往往要求各個電機能夠在不同條件下以不同的速度協(xié)調(diào)運行,分別實現(xiàn)不同精度的定位等功能,目前多采用集中控制方式,但是,其存在響應速度慢、抗干擾能力差、對數(shù)據(jù)通信可靠性要求高等固有缺點。同時,現(xiàn)有控制器一般采用單片機、86系列微控制器等作為硬件核心,盡管價格便宜,但由于運算速度和存儲容量的限制,一般適用于簡單控制過程和“慢”過程,在一些加工工藝復雜、動作協(xié)調(diào)要求高的場合,其應用十分有限。 本文設計了以CAN總線為基礎,以數(shù)字信號處理器為硬件平臺的模糊運動控制系統(tǒng),能很好解決這一問題,其結(jié)構(gòu)框圖如圖2所示。
硬件結(jié)構(gòu)
在一些多電機或多軸運動控制系統(tǒng)中,每個電機或軸的位置、速度等都必須單獨地受一個更高級別的控制器控制,且同一個過程單元中的幾個電機之間可能也需要傳遞一些實時數(shù)據(jù)。因此,可以通過CAN總線將多個獨立的現(xiàn)場運動控制器和主控制器互連起來,主控制器在一個更高的層次上,向各個電機發(fā)送參考運動信息(設定位置、速度,力矩等),并且等待來自測量器件的反饋。同時,各運動控制器之間也可以交換必要的數(shù)據(jù)信息。實現(xiàn)上述功能的硬件結(jié)構(gòu)如圖3所示。
現(xiàn)場運動控制單元以TI公司的TMS320LF2407A數(shù)字信號處理器芯片為硬件核心,它主要負責現(xiàn)場數(shù)據(jù)的采集和處理,以及通過CAN總線收發(fā)器與其它現(xiàn)場控制單元及主控制器之間的通信;TPIC82501為CAN總線收發(fā)器,符合CAN2.0B標準,主要負責把TMS320LF2407A發(fā)出的信息轉(zhuǎn)換為CAN協(xié)議格式,且將之發(fā)送到CAN總線上供主控制器和其它控制單元使用,同時,接收從CAN總線上來的數(shù)據(jù)供TMS320LF2407A做進一步的處理;IR2103S、IR2144和大功率MOSFET管,共同構(gòu)成電機的驅(qū)動電路。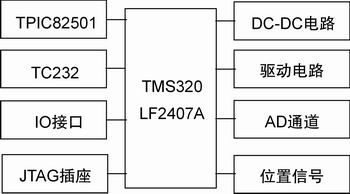
圖3 現(xiàn)場運動控制單元
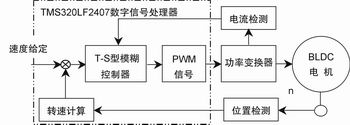
圖4 無刷直流電機的轉(zhuǎn)速控制系統(tǒng)
控制程序可在TI公司的數(shù)字信號處理器系統(tǒng)集成開發(fā)環(huán)境CC2000下以C語言或匯編語言的形式編寫,然后寫入TMS320LF2407A的片內(nèi)Flash EEPROM。TMS320LF2407A利用片內(nèi)A/D轉(zhuǎn)換單元或數(shù)字I/O通道輸入采樣數(shù)據(jù),通過片內(nèi)CAN控制模塊接受主控制器的位置、速度等信息,經(jīng)過實時計算,得到相應的控制量,通過片內(nèi)的事件管理器模塊產(chǎn)生適當?shù)腜WM脈沖輸出至MOSFET管,從而達到控制電機的目的。
軟件結(jié)構(gòu)
在現(xiàn)場運動控制單元中,初始化程序和模糊控制算法實現(xiàn)程序分別采用TMS320LF2407A的匯編語言和C語言編制。電流檢測、位置檢測、PWM輸出都采用中斷方式來實現(xiàn);運行速度、位置等參考值由主控制器、上位機或其它現(xiàn)場單元提供,通過電路板上的CAN收發(fā)器輸入LF2407A;電機的運行速度、相電流、軸位置等信息分別通過LF2407A的捕獲單元、片上A/D轉(zhuǎn)換器、正交脈沖編碼電路等得到;對電機的控制通過LF2407A的事件管理器模塊EVA、EVB輸出具有適當占空比的PWM脈沖給大功率MOSFET管來實現(xiàn)。
運行結(jié)果
為驗證本文算法的有效性,我們設計了以CAN總線為基礎、TMS320LF2407A數(shù)字信號處理器為核心的三相無刷直流電機的速度控制系統(tǒng),如圖4所示。參考速度由主控制器通過CAN總線輸入,系統(tǒng)采用電壓PWM調(diào)制策略。
圖中三相無刷直流電機的定子繞組為三相星形、定子每相感抗為40mH、相阻抗為190mΩ、在5000rpm時,最大允許電流是4.3A、轉(zhuǎn)矩常數(shù)為17.2mNm/A。采用本文介紹的控制系統(tǒng),當負載轉(zhuǎn)矩從減少為;設定轉(zhuǎn)速為800rpm和400rpm時,轉(zhuǎn)速波形分別達到了預定的要求。雖然本文控制器采用了實時模糊推理,增加了計算量,但是,由于使用了簡化T-S模型和數(shù)字信號處理器作為軟件和硬件基礎,保證了實時性和較高的控制精度。
結(jié)語
本文對T-S模糊模型進行了研究,著眼于控制系統(tǒng)綜合的容易實現(xiàn)、快速響應、實時性等指標,通過對模型進行合理簡化,得到了一種實時模糊控制算法,同時,針對目前廣泛使用的多軸運動控制系統(tǒng)的特點進行了分析,介紹了一種采用CAN總線實現(xiàn)多電機運動控制的分布式智能系統(tǒng)。實驗結(jié)果表明,所得到的基于CAN總線的模糊控制器具有較高的精確度,較好的實時性和動特性。
- 實時T-(5676)


聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。 舉報投訴
相關(guān)推薦
CAN總線控制器與DSP的接口
CAN控制器SJA1000及其應用
MODBUS總線在變頻調(diào)速控制系統(tǒng)中的應用
NLX230型模糊控制器及其嵌入式應用研究
一款獨立CAN總線控制器的說明
分享一種不錯的基于CAN總線的集散型火災報警控制系統(tǒng)
單片機模糊控制系統(tǒng)設計及應用實例
基于CAN總線的分散型控制系統(tǒng)的設計
基于CAN總線的閥門智能控制網(wǎng)絡系統(tǒng)
基于模糊控制的恒流源設計
基于模糊控制的遠程康復信息采集系統(tǒng)設計
基于DSP的高低速CAN總線汽車控制系統(tǒng)設計
基于TMS320F240的直接轉(zhuǎn)矩模糊控制系統(tǒng)研究
如何去設計一種CAN總線遠程控制系統(tǒng)網(wǎng)絡平臺?
如何去設計一種基于STM32控制器的模糊PID溫度控制系統(tǒng)呢
如何設計CAN總線分布式生產(chǎn)控制系統(tǒng)?
嵌入式系統(tǒng)的CAN總線設計
怎么實現(xiàn)基于CAN總線的電動汽車控制系統(tǒng)設計?
氣動柔性球關(guān)節(jié)的模糊PID控制
汽車CAN總線系統(tǒng)原理、設計與應用
汽車電子與CAN總線-汽車車身網(wǎng)絡系統(tǒng)
紡織生產(chǎn)控制系統(tǒng)中現(xiàn)場總線技術(shù)的研究及應用
請問怎樣去搭建一種模糊控制器系統(tǒng)的數(shù)學模型
采用LabVIEW實現(xiàn)灰水模糊控制系統(tǒng)設計
航空發(fā)動機T-S模型模糊廣義預測控制算法設計
 5
5基于現(xiàn)場總線的模糊控制系統(tǒng)
12DSA和CAN總線的步進電機控制系統(tǒng)
28基于不確定T-S模型的模糊滑模自適應控制
18由CAN 總線構(gòu)成的分布式清紗機控制系統(tǒng)
10Type-II型模糊控制器的結(jié)構(gòu)分析與設計
14Type-II型模糊控制器的結(jié)構(gòu)分析與設計
16基于CAN總線通訊的變槳距風力發(fā)電控制系統(tǒng)
32基于 CAN 總線的機械手控制系統(tǒng)The Control S
28基于LINUX和CAN總線的工業(yè)嵌入式控制系統(tǒng)研究
10CAN總線在現(xiàn)場總線控制系統(tǒng)中的應用
20魯棒自適應模糊控制器在復雜系統(tǒng)中的應用
20復合模糊控制器在電機調(diào)速系統(tǒng)中的應用
24基于WinFACT的模糊控制系統(tǒng)設計
8基于模糊自整定PID的主汽溫串級控制系統(tǒng)的設計
19基于模糊控制器的蒸汽發(fā)生器水位實時監(jiān)控系統(tǒng)
27CAN總線在液壓支架控制器的應用
17CAN總線在液壓支架電液控制系統(tǒng)的應用
13工程設備CAN總線控制系統(tǒng)設計
16基于自適應模糊PID控制器的溫度控制系統(tǒng)
39CAN總線在車輛分布式控制系統(tǒng)中的應用
30PLC液位帶修正因子模糊控制系統(tǒng)設計
31CAN控制器模塊
12基于CAN總線的清紗機控制系統(tǒng)設計
13變論域模糊控制器的改進及其應用
18基于CAN總線的電極箔生產(chǎn)控制系統(tǒng)
29基于CAN總線的呼吸機控制系統(tǒng)設計
27基于遺傳算法和模糊PID的勵磁控制器
23基于CAN總線的呼吸機控制系統(tǒng)設計
33基于自適應模糊PID控制器的溫度控制系統(tǒng)
72基于CAN總線的攤鋪機行走智能控制系統(tǒng)
40基于CAN總線的數(shù)字式自動找平控制系統(tǒng)設計
33#硬聲創(chuàng)作季 #控制系統(tǒng) 控制系統(tǒng)仿真與CAD-10-03 智能控制器設計方法-模糊控制

模糊控制在基于CAN總線的數(shù)據(jù)采集與控制系統(tǒng)中的應用
 587
587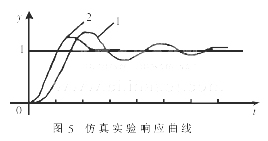

基于T-S模型的無人機模糊控制器
70現(xiàn)場總線控制系統(tǒng)的實時性研究
26微機模糊控制在TIG逆變電源中的應用
25CAN總線的分布式控制系統(tǒng)中組態(tài)軟件的應用
27模糊溫度控制器的設計與Matlab仿真
131模糊溫度控制器的設計及其Matlab仿真
56路口交通燈實時模糊控制系統(tǒng)設計
107基于CAN總線的車燈控制系統(tǒng)設計
13627
一種簡化PID模糊控制器的研究與設計
54基于T-S模糊模型的電液比例位置控制系統(tǒng)研究
17基于Matlab的網(wǎng)絡控制系統(tǒng)模糊控制算法應用研究
45PID控制器的模糊增益調(diào)整及在電阻爐溫控制系統(tǒng)中的應用_王海峰
12CAN總線技術(shù)在智能車窗控制系統(tǒng)中的應用
12基于分層模糊系統(tǒng)的自適應H∞控制器設計
0CAN總線實現(xiàn)運動控制系統(tǒng)網(wǎng)絡化的軟硬件設計
3133
茶葉理條機雙模糊控制系統(tǒng)設計
1如何基于模糊推理的參數(shù)自整定PI控制器引入到PMSM矢量控制系統(tǒng)中
11基于CAN控制器P8xC591和傳感器實現(xiàn)車窗智能控制系統(tǒng)的設計
2414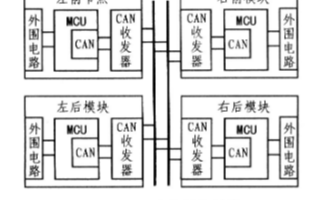
如何使用CAN總線實現(xiàn)磁導航AGV控制系統(tǒng)的設計資料概述
39基于FPGA的CAN總線控制器的設計
868
- 設計技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測量儀表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動
- 處理器/DSP
- EDA/IC設計
- 存儲技術(shù)
- 光電顯示
- EMC/EMI設計
- 連接器
- 行業(yè)應用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實
- 可穿戴設備
- 機器人
- 安全設備/系統(tǒng)
- 軍用/航空電子
- 移動通信
- 工業(yè)控制
- 便攜設備
- 觸控感測
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報投訴
- 社交網(wǎng)絡
- 微博
- 移動端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:[email protected]
- 內(nèi)容合作
- 黃晶晶:[email protected]
- 內(nèi)容合作(海外)
- 張迎輝:[email protected]
- 供應鏈服務 PCB/IC/PCBA
- 江良華:[email protected]
- 投資合作
- 曾海銀:[email protected]
- 社區(qū)合作
- 劉勇:[email protected]
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 深圳華秋電子有限公司
電子發(fā)燒友 (電路圖) 粵公網(wǎng)安備 44030402000349 號 電信與信息服務業(yè)務經(jīng)營許可證:合字B2-20210191 工商網(wǎng)監(jiān)
湘ICP備 2023018690 號
工商網(wǎng)監(jiān)
湘ICP備 2023018690 號
評論