如何獲取矩形的測量及矩形位置參數?
首先給出一個問題:如下邊一個圖片中,如何獲取矩形的測量,也就是說,需要更準確的矩形位置參數?
西門子SCL中的SEL函數的使用
除ARRAY和ATRUCT數據類型和參數數據類型外的所有類型均作為輸入值。所有參數化變量均應是同一類....
對齊C型氣動焊鉗上的圓形電極臂
在對齊固定式電極臂后必須注意要重新計算 TCP 點。在對齊前要注意焊鉗隨附資料中的報告和圖紙。第 1....
ALBANY卷簾門的調試心得V1版
預運行光電元件在距離底部型材下方約 100 mm (3.94”) 處運行(取決于門型)。該元件會在門....
S7-300/400集成PN口 MODBUS TCP通訊(TIA)
下面以S7-300單站系統及Modbus Slave軟件為例,詳細介紹如何將S7-300單站系統CP....
KUKA使用SUBMIT解釋器
SUBMIT 解釋器與機器人解釋器和 I/O 管理器共享系統功率,其中,機器人解釋器和 I/O 管理....
KUKA機器人高級編程CWRITE的用法V3.1
CWRITE可以通過命令通道$CMD將語句傳輸到解釋器。除了機器人口譯員和系統提交外,擴展提交也可在....
WorkVisual將機器人控制系統配給實際應用的機器人控制系統步驟
用該操作步驟可將項目中的每個機器人控制系統分配給一個實際應用的機器人控制系統。然后,項目可從 Wor....
MOVIFIT更換EBOX+指示燈說明V1.30
如果您已經設置了數據管理并且使用的是AMX1001單元,則只需斷開舊單元的連接并連接替換單元,即可更....
I-DEVICE(智能設備)是什么
通過如下的步驟配置 PC的 IP地址:選擇電腦的“ 控制面板 > 網絡和共享 > 本地連接>屬性”打....
S7-300集成PN口作為Profinet智能設備
S7-300 PLC(192.168.0.1/24)與 S7-1500 PLC (192.168.0....
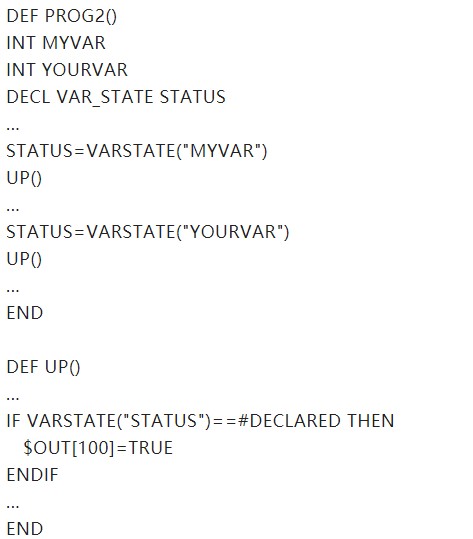
各種邏輯塊中聲明的變量或參數類型
臨時變量在本地屬于邏輯塊,不產生靜態內存區域,他們位于CPU的堆棧里。本塊正在運行時,其值才被保留。....
西門子安全PLC:F- I/O DB介紹
在硬件與網絡編輯器中組態 F-I/ O 時,將自動為每個 F-I/O 創建一個 F-I/O DB ....
實現兩個CPU之間的PROFINET IO通信
PROFINET IO 通信不支持跨網段的實時通信,此外兩個 PROFINET IO 控制器如果在其....
STEP7中SFC12功能塊的應用
FB144 – FB_Docken 用于注冊和注銷 ProfiNet 設備。該塊通常采用專用背景數據....
KUKA機器人將參數傳遞到子程序或函數中V1.28版
建議:始終將一個參數傳遞到相同數據類型的變量中。可以將參數傳遞到另一個數據類型中,但是有特定的限制。
涂膠設備原理及KUKA機器人控制分析+MAKRO
無論是DURR還是SCA的涂膠設備,他們在關機斷電后都要進行自動尋參,這是因為他們的定量機電機使用了....
KUKA鏈接機器人程序
一個全局子程序是一個獨立的機器人程序,可由另一個機器人程序調用。可根據具體要求對程序進行分支,即某一....
更換KUKA C2電柜的風扇V2023
柜冷卻裝置分為兩條冷卻循環回路。帶有控制電子元件的內部區域通過一臺熱交換器進行冷卻。在外部區域內,則....
KUKAC4機器人電機風扇故障,使得機器人沒有好使能.V2
箱柜冷卻裝置包含兩條冷卻循環回路。裝有控制、功率電子元器件的箱內范圍通過一個換熱器進行散熱。在箱柜的....
F-IO作為共享設備的使用入門
首先打開TIA PORTAL 軟件,添加兩個 C PU,分別設置 IP 地址,將這兩個 C PU的以....
F-IO作為共享設備的使用入門
首先打開TIA PORTAL 軟件,添加兩個 C PU,分別設置 IP 地址,將這兩個 C PU的以....
KUKA機器人電伺服焊鉗力的建立過程V2.28
2: SERVOZANGE 1 Schweissen Programmnummer= 99 Punk....
KUAK機器人更換手軸A4-A5-A6A的幾個關鍵點V2.27
將連接軸裝到軸 4 和軸 5 的電機上 (軸向固定),事先給軸連接件涂上少許 Microlube G....
對齊X型氣動焊鉗上的扁平電極臂及更換極臂.
第 3 步:將帶焊鉗的機器人移至一個安全的維護位置。或者分離機器人焊鉗與機器人,并將機器人焊鉗定位至....
標準CPU與S7-1500R/H冗余系統是如何進行S7通信的?
S7-1500R/H 冗余系統的基本通信功能與 S7-1500 標準系統的大致相同,但在具體使用時有....





 工商網監
工商網監