介紹S7-200 PC Access SMART軟件的使用方法
OPC全稱是Object Linking and Embedding(OLE) for Proces....
KUKA機器人高級編程CWRITE的用法
CWRITE 將數據寫入打開的串行接口或加載的 LD_EXT_OBJ 類型的外部模塊。在加載的 LD....
SEW-MOVIPRO啟動應用程序配置程序設置步驟
使用應用程序配置程序,您可以確定使用MOVIPRO執行哪些應用程序。可以進行不同的配置,從簡單的速度....
S7-400集成PN口如何進行Modbus TCP通訊呢?
打開Step7軟件,新建一個工程項目文件,命名為“M_TCP_CPU_V26(Client)”, 在....
更換與舊電極臂對齊的電極臂
如果兩根電極臂都必須更換,我們建議您首先更換與舊電極臂對齊的電極臂,然后再更換第二根電極臂。第 1 ....
KUKA KRC4機器人首次開機啟動
首次開機頁面,顯示以下查詢:RDC 存儲器和控制系統不一致 什么被更換了,用按鍵 機器人確認, 顯示....
DOCK之快換的Profinet對接使用方式
同一個設備可以在不同的機器人上交替運行。為此必須使用其他的 IOCTL 功能進行解耦和耦合。
淺析使用SIMATIC Safety分配F-I/O的PROFIsafe地址
在這種情況下,唯一性由 F 源地址和 F 目標地址對確保。由于 SIMOTION 和 F-CPU 中....
KST_WorkVisual-KUKA用KRC瀏覽器在線工作的方法
將 WorkVisual 工作目錄中的更改傳輸到實際所用的機器人控制系統上。
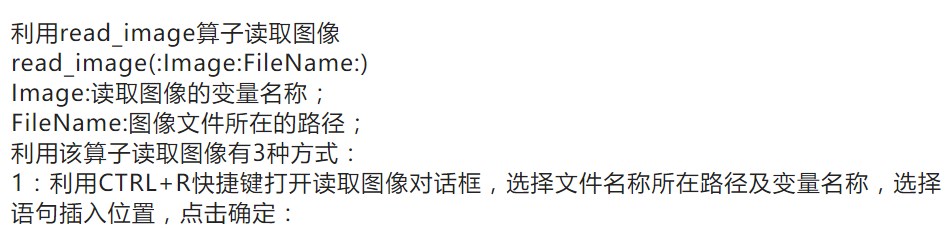
Halcon視覺缺陷檢測分類
標準預處理功能:圖像增強、腐蝕、膨脹、開運算、閉運算、濾波、傅立葉變換(頻域空間域轉換)、距離變換、....
scalacex200交換機介紹
可將 SCALANCE X-200IRT 交換機用于具有嚴格的實時要求(實時以及同步實時 [ ....
S7-1500與ET200SP PNIO通信配置
SIMATIC S7- 1500 CPU集成了 PROFINET 接口,該接口具備連接PROFINE....
如何在WinCC上顯示S7 CPU的運行模式
利用S7 系統函數 SFC51 “RDSYSST”(SSL_ID=W#16#023 2, Index....
Halcon測量基礎知識入門
1D測量主要就是拉個框獲取這個框中定義的高頻范圍的臨界點,所測量的范圍比較有限,基于兩點之間的距離。
Halcon中的測量工具之Metrology介紹
對于使用Halcon的小伙伴們來說,在菜單欄上的“助手”一欄中可以找到一些可以快捷使用的工具。
Halcon基于形狀匹配的人臉追蹤
*create_planar_calib_deformable_model_xld(Template....
Halcon例程之圓弧測量工具分析
在圖像上相應位置繪制圓,這里用固定變量的方法產生圓的參數,把這個圓繪制代碼注釋掉了。這個圓用于后面的....
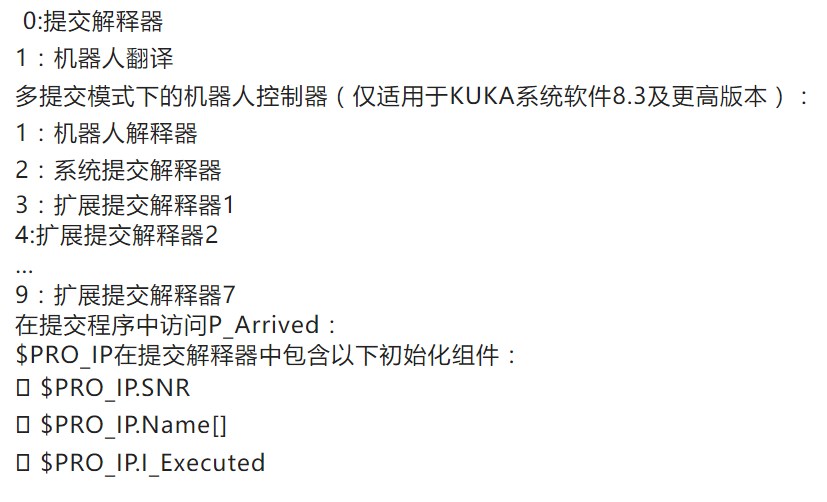
KUKA系統變量:$ERR 程序信息的結構
該變量可用于評估當前執行的程序相對于提前運行。例如,該變量可用于評估程序中的錯誤,以便能夠使用合適的....
UDP和調試助手介紹
S7-1200支持UDP單播和UDP廣播,不支持UDP組播。UDP是一種無連接的通信協議,通過調用T....
VASS標準中安全門的接法與控制方法
當輸入 IN1 或 IN2 中一個信號狀態為 0 時,使能信號 Q 將立即復位為 0 (安全門....
DOCK之profinet的對接快換耦合使用方式
同一個設備可以在不同的機器人上交替運行。為此必須使用其他的 IOCTL 功能進行解耦和耦合。





 工商網監
工商網監