KUKAC4測量工具坐標的作用是什么
BASE坐標用來確定機器人空間上的坐標點,而TOOL則用來確定機器人以什么樣的姿態去這個軌跡點.
WINCC博途以太網下載方式分享
帶以太網口的西門子一代精簡面板和二代精簡面板均支持以太網下載,本章使用TKP600Basic col....
用VARSTATE()可以詢問變量的狀態
ARSTATE() 是帶有 VAR_STATE 類型返還值的函數。VAR_STATE 是在系統中如下....
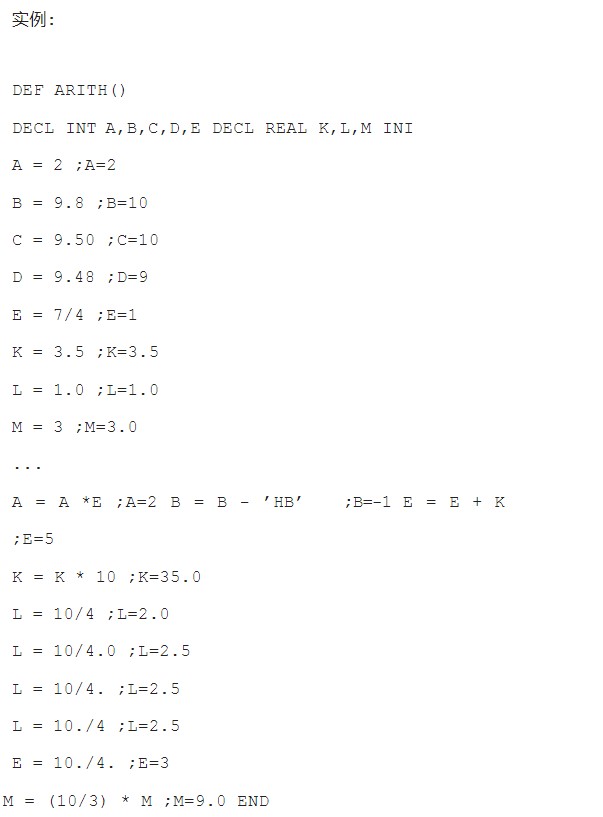
KUKA機器人結構化機器人程序分析
KRL 是一種類似PASCAL的高級編程語言,利用KRL語言編程能夠實現結構化編程處理復雜的任務。
MOVIFIT更換EBOX+指示燈步驟說明
必要時可以根據實際運行情況關閉電壓層 24V_S,以便集中關閉設備內的執行器 。
F-CPU進入STOP模式的操作步驟
F-CPU 進入 STOP 模式,在診斷緩沖區出現 “Data corruption in the ....
基于以太網的SIMATIC NET服務器與S7-1200通信
這種組態方式可以實現 OPC UA 客戶端通過 SIMATIC NET 訪問 S7-1200 CPU....
HALCON機器視覺算法包解析
最近一直在使用機器人與上位機進行視覺抓取技術的調試,對C# 也稍有了解,就這樣我開始接觸到了HALC....
西門子CPU-1200在線和診斷工具-比較離線CPU與在線CPU
可以將在線 CPU 中的代碼塊與項目中的代碼塊進行比較。如果項目中的代碼塊與在線 CPU的代碼塊不匹....
S7-1500和S7-1200 F-CPU間Flexible F-Link通信
從STEP7 Safety V15.1開始,S7-1200和S7-1500 F-CPU間可以通過Fl....
BUFF傳送連的使用調試V1.27版分析
當小車通過通行檢測傳感器以及上件積放停止器上無小車時,傳感器會將反饋給PLC ,PLC會給出一個可以....
淺析ENDWHILE編程設定當型循環
當型循環。一直重復指令塊直到滿足了特定條件的循環。如果不滿足條件,則用 ENDWHILE 后的下一個....
滾床控制SEW變頻器MOVIfit的PLC控制/S11安全控制設置
功能:改變電壓及頻率,SEW程序部分,初始化及IPOS程序(AM1001).
結構數據類型Struct介紹
Struct類型是一種由多個不同數據類型元素組成的數據結構,其元素可以是基本數據類型,也可以是Str....
S7 Fault Tolerant connection/S7容錯連接介紹
S7容錯連接是S7-400H(High available高可用性)系列CPU才能支持的冗余通訊方式....
S7-300集成PN口作為Profinet智能設備
如圖1所示,S7-300 PLC(192.168.0.1/24)與 S7-1500 PLC (192....
S7-300集成PN口作為Profinnet控制器使用
PROFINET IO的IO現場設備在PROFINET上有著相同的等級,在網絡組態時分配給一個IO控....
VASS-KUKA機器人力矩監控TECH2_ Koll_Ueb變量的控制使用簡介
如果機器人與物體碰撞,則機器人控制器會增加軸轉矩以克服阻力。這可能會損壞機器人,工具或其他物體。
S7-300集成DP口與S7-200的DP主從通信設計實現
S7-300與S7-200通過EM277 進行PROFIBUS DP通訊,需要在STEP7中進行S7....
KUKA大眾版8.2系統外部軸配置
KUKA大眾版8.2系統,配置外部軸需要在項目中進行設置選擇KPP1項目用于外部軸1和KPP2使用外....





 工商網監
工商網監