? ? ? Fronius?CMT是一種工作方式技術: 焊接開始,焊槍伺服電機驅動,焊絲與板材電弧引....

CIOCTL僅與外部對象相關。 CIOCTL可用于將任何數據傳輸到外部對象,例如, 配置數據以更改文....
ProConOS是一款高性能PLC運行時間引擎,專為基于嵌入式和PC的控制應用而設計。ProConO....
POS_BACK可用于返回到中斷的動作指令的起始位置$POS_BACK對應于用于近似窗口內的中斷的窗....

表達式類型的整數必須給出計算器的最初和最后的值。表達式求一次循環開始的值。計時器被最初的值調整和增加....

過指令“GetSMCinfo”,可檢索當前所插入 SIMATIC 存儲卡的相關信息。通過參數“Mod....

帶有機器人中斷數據的結構 這些數據可以通過變量校正功能或通過主菜單中的診斷功能顯示。 在robot和....

ProDiag FB是用ProDiag編程語言創建的,例如使用“添加新塊”對話框。

使用了KUKA.OfficeSite,或者系統軟件的映像正在辦公電腦上運行。
你能用系統變量$ADVANCE定義先前控制器執行的中斷如何動作。在指令關于外圍( 例如輸入/輸出指令....
硬件數據類型:硬件數據類型由 CPU 提供。可用硬件數據類型的數目取決于 CPU。 根據硬件配置中設....

指令“DeviceStates”用于查詢 IO 系統中所有模塊的特定狀態信息

硬件數據類型:硬件數據類型由 CPU 提供。可用硬件數據類型的數目取決于 CPU。

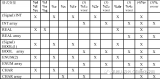
除ARRAY和ATRUCT數據類型和參數數據類型外的所有類型均作為輸入值。所有參數化變量均應是同一類....
選擇旋轉方向后,驅動器以預期的爬行速度沿相應方向移動,直到取消選擇。通過以下方式選擇方向。

ProDiag FB是用ProDiag編程語言創建的,例如使用“添加新塊”對話框。

預先確定的變量(INT$DATA_SER1orINT$DATA_SER2), 未被請求的數據到達后通....
如果機器人控制器在Multi-Submit模式下操作(僅適用于KUKA系統軟件8.3及更高版本),則....
必須將其標定為其表示的工程單位的最小值和最大值。對于要轉換為模擬量輸出值的以工程單位表示的值,應首先....

在聲明部分給該模擬輸出端分配一個任意的名稱,在該情況下為 GLUE。粘結劑量取決于當前的軌跡速度 (....

對精簡面板進行備份有兩種方式,一種是在用U盤連接面板,將數據備份至U盤(只有二代精簡面板支持該方式備....

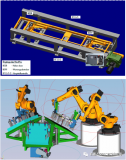
平移輥床使用的功能塊有FB 453 FB_Elefant_AMX, FB 365 FB_SEW_AM....

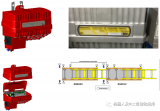
X5520-STO安全點直接控制變頻器的功率單元以及抱閘的控制單元,接通后使抱閘和電機可以控制。S1....
當型循環。一直重復指令塊直到滿足了特定條件的循環。如果不滿足條件,則用 ENDWHILE 后的下一個....

“new” 值在控制器轉換完成而且再次返回后被使用。這是在線修正和和其他程序修改的要素。如果你想總是....

不需要對CHANNEL語句進行編程。它已經為文件$CUSTOM.DAT中的所有外部模塊預定義。不過,....

車身車間需要同時進行車身的進料和出料,例如在焊接線上,“Elefantentrab(穿梭模式)”。F....
scapacsa: Module, Teleskoparm (TA)(伸縮臂的高度變化是由內部導向桿....

機器人程序的結構是體現其使用價值的一個十分重要的因數。程序結構化越規范,程序就越易于理解、執行效果越....

“ =” 符號和最初的值以常量的形式跟隨變量名。當聲明默認的設置,你不能在聲明語句中列出多個變量。一....






 工商網監
工商網監