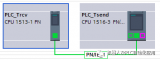
在以下示例中,將在 S7-1500 系列的兩個 CPU 間創建一個編程連接,并將數據記錄從 CPU ....
運動條件被用來阻止機器人。 機器人只有在完全滿足編程運動條件的情況下才能移動。 在線形式FB ONL....

一般的KUKA程序: 1? PTP P0 2? SPLINE 3? ?SPL P1 4? ?SPL ....

使用“加載”指令,可加載累加器 1 中特定操作數的內容。
注意:根據應用程序的不同,停靠時不必單獨投影所有參與者。一個參與者的配置就足夠了(例如,如果所有碼頭....

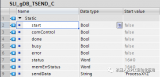
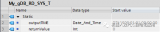
要求 全局數據塊已打開。 操作步驟 要聲明一個 ARRAY 數據類型的變量,請按以下步驟操作: 在“....
SIMATIC MMC 卡是 S7-300-CPU 的一個存儲器模塊。可將 MMC 卡組態為裝載存儲....
DB_ANY 數據類型用來標識任意數據塊。對于 S7-1200/1500 系列的 CPU,可以選擇訪....

全局數據塊中的變量可以按符號名或絕對地址進行尋址。對于符號尋址,可以使用數據塊的名稱和變量名,并用圓....
數據記錄 數據是指在過程中采集并保存在所連接的某一自動化系統內存中的信息。例如,它們以溫度、填充量或....

Graph程序在運行過程中,某些情況下需要將Sequence暫停去解決問題,當問題解決后,需要接著當....

在幾何光學和陰極射線管(CRT)顯示中。畸變是對直線投影的一種偏移。簡單來說直線投影是場景內的一條直....

在以下示例中,在 S7-1500 系列的兩個 CPU 間創建一個編程連接,并將一個字符串從 CPU ....
可使用“設備和網絡”(Devices & Networks) 編輯器,組態通過 PROFINET....
該模塊將Robot的輸出數據復制到Robot結構中。

簡介 使用使能輸出 ENO,可檢測和處理某些運行系統錯誤。后續指令的執行取決于該使能輸出的信號狀態。....
說明 使用“掃描 RLO 的信號上升沿”指令,可查詢邏輯運算結果 (RLO) 的信號狀態從“0”到“....

說明 可以使用該指令讀取 CPU 時鐘的當前日期和當前時間(模塊時間)。 在此指令的 OUT 輸出參....
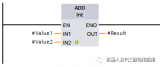
計算方程式以下示例程序顯示了如何使用三個運算指令計算以下方程式:RESULT = ((A + B) ....
通過詳細比較可以確定存在塊版本不同的確切位置。用戶通過以下顏色編碼可以盡快找到這些位置:差異所在的行....

使用“滿足條件時執行”指令可以重復執行程序循環,直至不滿足執行條件為止。該條件是結果為布爾值(TRU....
CASE:創建多路分支 說明 使用“創建多路分支”指令,可以根據表達式的值執行多個指令序列中的一個。....

FB 951 F_ROB_NOT? F應用程序組件F_ROB_NOTF(FB951)在F應用程序部件....

塊調用環境對話框 如果已在項目環境內部打開塊,將顯示此對話框。 利用此對話框中的選項,能夠為需要調試....

使用“掃描操作數的信號上升沿”指令,可以確定所指定操作數(<操作數 1>)的信號狀態是否從“0”變為“1”。

數據類型 INT 的操作數長度為 16 位,并由兩部分組成:一部分是符號,另一部分是數值。位 0 到....

在引導電流穩定時間(5ms)后,線性電機啟動螺柱提升至距工件預定距離。然后我們接收引導電流電弧。在引....

與它相配合還要有相對應的USER用戶程序組建,只要是標準用戶程就行,不能和激光焊的標準組件混用。

使用SCA粘合控制的示例,顯示了模擬輸出的配置和配置。 大眾標準規定的涂膠模擬量IO范圍 奧迪標準的....
說明 使用該指令,可以將在輸入 IN 中指定的十六進制數轉換為 ASCII 字符串。轉換結果存儲到參....





 工商網監
工商網監