PROFINET IO網絡支持總線型,星型,環型,樹型或混合結構。在應用中,尤其是存在大型且復雜的P....
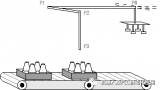
下圖顯示了一個站,用于將玻璃容器從托盤上移走。傳送帶再將托盤傳送到站。
在以下部分中,將在組織塊“Main” 中調用 SCL 函數塊“SCL_Best_before_da....

此指令在機器人運動過程中為一定義長度的脈沖進行了賦值。該脈沖將在設定的時間段內一直保持于已定義了的電....

OP77B HMI 設備通過 MPI 網絡連接到果汁攪拌系統的 PLC。

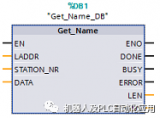
“Get_Name”指令讀取 PROFINET IO 設備、PROFIBUS 從站或 AS-i sl....
簡介 可使用WinCC flexible的集成編程接口在運行時訪問某部分項目數據。通過Visual ....

在“設備和網絡”編輯器中可創建下列通信伙伴。

PID_3Step 與 PID_Compact 的指令參數類似也分為以下主要兩部分:輸入參數與輸出參....

“獲取最小值”指令比較可用輸入的值,并將最小的值寫入輸出 OUT 中。在指令框中可以通過其它輸入來擴....

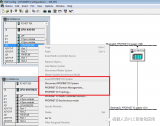
在交叉引用列表中,可顯示項目樹中所選源對象的參考對象和下屬對象。

當一個值被指定,變量的當前值被通過表達式指定的新的值代替。此表達式也能夠包含函數標識符,其被語句激活....

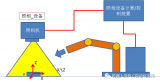
首先要建立機器人的軌跡,作為基礎機器人編程軌跡.
IF (($LOAD.M0) AND ($LOAD.J.X==0) AND($LOAD.J.Y==0....

使用“循環右移”指令,將參數 IN 的內容逐位向右循環移位,并將結果賦值給指定的操作數。

可以使用指令“構建程序代碼”,在 SCL 塊中構建程序代碼并將其分為幾個不同區域。
可以在編程窗口中使用區域導航內的“報警”窗格,定義報警的屬性和內容。僅當監視的錯誤已經解決并且滿足以....

同一個設備可以在不同的機器人上交替運行。為此必須使用其他的 IOCTL 功能進行解耦和耦合。

簡易的機器人和PLC信息提取。

出于產品測試和質量控制的目的,報表用于記錄生產過程中的事件。這些事件,即報警和配方數據,以班次報表的....

PROFINET 網絡中的設備在分配名稱后才可與 CPU 連接。

STL (語句列表)是一種基于文本的編程語言,可用于編寫邏輯塊。STL 程序以程序段的形式組成。
通過可設定的軟件限位開關范圍,可限制所有機械手和定位軸的軸運動范圍。

在發生通信錯誤、F- I/O 錯誤或通道錯誤發生后,該指令將為 F 運行組中的所有 F-I/O ....
在F-CPU的“屬性”選項卡中,選中“F-capability activated”復選框(默認設置....

在以下示例中,將通過 GETIO 讀取數字量輸入模塊的通道,并通過 SETIO 將新值寫入數字量輸出....

為了獲得 MMC 卡的序列號,必須使用 SFC 51 "RDSYSST" 讀出系統狀態列表 (SSL....

該模塊將Robot的輸出數據復制到Robot結構中。

可以通過SFC 51讀取CPU的指示燈狀態,使用的SSL_ID參數為16#74(16#19)讀取全部....

在以下示例中,可通過 RDREC 讀取 IO 設備的診斷數據記錄“16#E00A”。觸發斷路時,系統....




 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1

