 自動駕駛——雷達數據的處理
自動駕駛——雷達數據的處理
360°的激光數據可視化后可以得到點云數據。激光雷達的點云數據結構比較簡單。下面我們就以N線激光雷達為例來講解點云的數據結構。
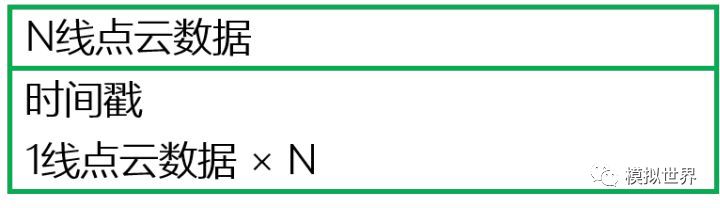
在實際的無人駕駛系統中,每一幀的數據都會有時間戳,根據時間戳進行后續和時間有關的計算(如距離信息的微分等)。因此N線激光雷達的點云數據結構如下圖。
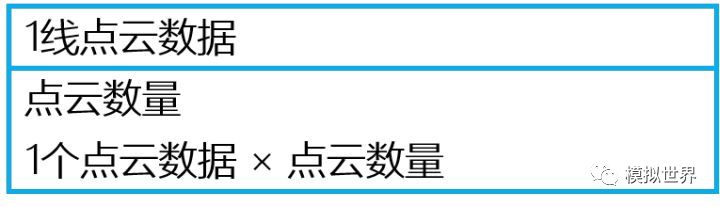
每一線點云的數據結構又是由點云的數量和每一個點云的數據結構組成。由于激光雷達的數據采集頻率和單線的點云數量都是可以設置的,因此1線點云數據中需要包含點云數量這個信息。
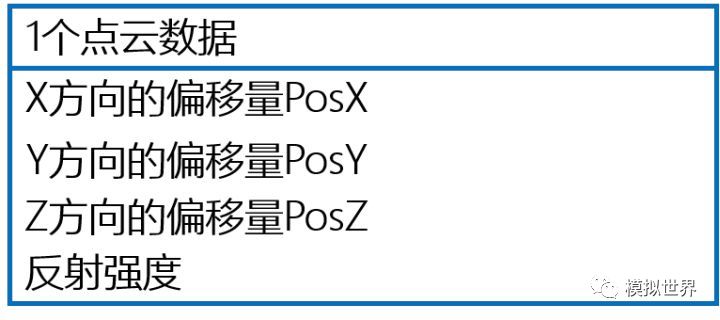
最底層的是單個點云的數據結構。點的表達既可以使用theta/r的極坐標表示,也可以使用x/y/z的3維坐標表示。每個點云除了坐標外,還有一個很重要的元素,那就是激光的反射強度。激光在不同材料上的反射強度是不一樣的。以3維坐標的表示方法為例,單個點云的數據結構如下圖。X/Y/Z方向的偏移量是以激光雷達的安裝位置作為原點。
激光雷達點云數據的一般處理方式是:數據預處理(坐標轉換,去噪聲等),聚類(根據點云距離或反射強度),提取聚類后的特征,根據特征進行分類等后處理工作。我們就以百度Apollo 2.0目前已開放的功能為例,看看激光雷達能完成哪些工作。
1.障礙物檢測與分割
利用高精度地圖限定感興趣區域(ROI,Region ofInterest)后,基于全卷積深度神經網絡學習點云特征并預測障礙物的相關屬性,得到前景障礙物檢測與分割。
2. 可通行空間檢測
利用高精度地圖限定ROI后,可以對ROI內部(比如可行駛道路和交叉口)的點云的高度及連續性信息進行判斷點云處是否可通行。
3.高精度電子地圖制圖與定位
利用多線激光雷達的點云信息與地圖采集車載組合慣導的信息,進行高精地圖制作。自動駕駛汽車利用激光點云信息與高精度地圖匹配,以此實現高精度定位。
4.障礙物軌跡預測
根據激光雷達的感知數據與障礙物所在車道的拓撲關系(道路連接關系)進行障礙物的軌跡預測,以此作為無人車規劃(避障、換道、超車等)的判斷依據。
當前人工智能的算法還不夠成熟,純視覺傳感器的無人駕駛方案在安全性上還存在較多問題,因此現階段的無人車的開發還離不開激光雷達。不過成本是激光雷達普及所遇到的最大問題。畢竟一款比車還貴的傳感器是車企無法接受的。隨著技術的發展,利用固態掃描技術的固態激光雷達逐漸成為車用激光雷達的主流技術。
Quanergy公司的Solid StateLiDAR S3在CES 2017上獲得了汽車智能類(VehicleIntelligence Category)的最高獎項——最佳創新獎(Best ofInnovation Award),則再一次讓Quanergy利用固態掃描技術賺足了眼球。而作為車用激光雷達的老大Velodyne也當仁不讓,在CES展之前就發布消息,稱其與EPC(Efficient PowerConversion Corporation)共同研發有望將固態激光雷達成本降至50美金的核心芯片。當然,展會上還有Innoviz和TriLumina也宣稱要推出固態激光雷達。
-
雷達
+關注
關注
50文章
3089瀏覽量
119505 -
自動駕駛
+關注
關注
788文章
14224瀏覽量
169693
原文標題:自動駕駛基礎——LiDAR數據的處理
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
激光雷達在自動駕駛領域中的優勢

新能源車軟件單元測試深度解析:自動駕駛系統視角
愛普生高精度車規晶振助力激光雷達自動駕駛

激光雷達技術:自動駕駛的應用與發展趨勢

從《自動駕駛地圖數據規范》聊高精地圖在自動駕駛中的重要性

標貝科技:自動駕駛中的數據標注類別分享

標貝科技:自動駕駛中的數據標注類別分享






 工商網監
工商網監
評論