") 實現(xiàn)無人駕駛的難點在哪?
實現(xiàn)無人駕駛的難點在哪?
如果自動駕駛標準是按照L5級別來要求的話,那確實還有很長的路要走,因為今天關(guān)于完全自動駕駛汽車還存在許多爭議,不僅是技術(shù)上的,還包括法律、倫理等方面的界定。但羅馬不是一天建成,飯也不是一口吃大,如果我們適當降低標準,以有限的自動駕駛來看,比如L2-L3級別,那么我們已經(jīng)看到有很多公司在這樣做,而且已經(jīng)離我們很近了。
最近幾年,自動駕駛車一直是傳統(tǒng)汽車廠商、一級零配件供應商孜孜探索的領(lǐng)域,也是包括IT公司和互聯(lián)網(wǎng)公司在內(nèi)都很關(guān)注的風口。
雖然大家一直都在討論這個熱點,但是關(guān)于“自動駕駛何時能量產(chǎn)?全自動駕駛什么時候?qū)崿F(xiàn)?”說了這么多年,似乎依然是個未知數(shù)。
有人說:“自動駕駛汽車是活在夢里,不可能實現(xiàn)。”
如果說的這個人是按照L5級別來要求的話,那確實還有很長的路要走,因為今天關(guān)于完全自動駕駛汽車還存在許多爭議,不僅是技術(shù)上的,還包括法律、倫理等方面的界定。
但羅馬不是一天建成,飯也不是一口吃大,如果我們適當降低標準,以有限的自動駕駛來看,比如L2-L3級別,那么我們已經(jīng)看到有很多公司在這樣做,而且已經(jīng)離我們很近了。
說到這兒,也許你還有點云里霧里:“L2、L5這些術(shù)語代表什么?”
為了方便您了解自動駕駛汽車,我們先來一個簡單科普。
1、什么是自動駕駛?
有關(guān)自動駕駛,美國汽車工程師協(xié)會(SAE)已經(jīng)對其技術(shù)定義了六級自動化級別。
從圖中可以看到,L2級和L3級之間有條分界線:L2級及以下,由駕駛員主導監(jiān)視環(huán)境;L3級及以上,由系統(tǒng)監(jiān)視環(huán)境。
所以,可以說L2級到L3級是一個明顯的分界點——從ADAS(高級輔助駕駛)向AD(自動駕駛)過渡。
通俗來講,L3級以下和L3級以上最大區(qū)別就是,汽車能否像人一樣感知周圍環(huán)境并做出決策。
而在現(xiàn)階段,L5級存在著巨大爭議,盡管很多創(chuàng)業(yè)公司、IT公司以及車企都把L5視作終極目標,但無論是法律、法規(guī)方面的阻礙,還是技術(shù)成熟度上的局限,都使人們意識到實現(xiàn)L5還需要很長時間。
所以在現(xiàn)階段的市場上,大多數(shù)傳統(tǒng)車企更著力于研發(fā)L2/L3級別的自動駕駛技術(shù),并行研究封閉場景內(nèi)的L4級自動駕駛系統(tǒng)。
2、實現(xiàn)自動駕駛的難點在哪?
那么,當前階段實現(xiàn)自動駕駛的難點在哪呢?
這里我們就要討論自動駕駛的三大要素——感知層、決策層和執(zhí)行層。
感知層
相當于駕駛員的眼睛和耳朵,由各種各樣的傳感器來完成對外部環(huán)境的判斷和識別。
考慮到復雜的外界場景,多傳感器的融合技術(shù)是一個趨勢。目前主流的有兩套傳感器系統(tǒng),一套以雷達和攝像頭為主的感知系統(tǒng),和一套以激光雷達為主的感知系統(tǒng),兩套系統(tǒng)互為備份提供冗余性、覆蓋范圍和精度上的需求。
決策層
相當于駕駛員的大腦,通過控制器對環(huán)境的認知以及路徑規(guī)劃進行決策判斷。
L2級別以下的ADAS系統(tǒng),主要對傳感器收集的數(shù)據(jù)進行篩選和分析;而L3級別以上,需要系統(tǒng)對環(huán)境進行認知,參與到路徑規(guī)劃和決策判斷中來。
在此場景下,深度學習算法、大量算力以及存儲海量數(shù)據(jù)的價值就凸顯出來了,決策層的關(guān)鍵點就在于車載芯片和算法。
執(zhí)行層
相當于駕駛員的手和腳,來完成車輛制動、轉(zhuǎn)向和驅(qū)動。
自動駕駛的算法和芯片依賴于機械特性強有力的執(zhí)行來完成決策層的指令,包括以電機為核心驅(qū)動的電子轉(zhuǎn)向和電子制動等核心部件。
在自動駕駛場景下,有關(guān)制動系統(tǒng)的要求會更高,自動駕駛需要更快地線控車輛系統(tǒng),包括電子油門、線控轉(zhuǎn)向以及電子機械制動系統(tǒng)。
這三個要素中,每個要素都至關(guān)重要,缺一不可。
其中,核心決策層的研發(fā)尤為關(guān)鍵。
傳感器和執(zhí)行層,可以配置多套冗余系統(tǒng)進行保護。但是決策層的核心算法如何保證可靠性和安全性,是自動駕駛研發(fā)中最為關(guān)鍵的核心討論點。
很多IT跨國公司、車企、創(chuàng)業(yè)者都把目光聚焦到這個核心算法領(lǐng)域。
3、自動駕駛行業(yè)格局
最近,資訊機構(gòu)Navigant Research公布了2019自動駕駛領(lǐng)導力排行榜,谷歌母公司Alphabet旗下的Waymo公司拔得頭籌。
至于評判標準,是根據(jù)每家公司在「愿景」、「商業(yè)化策略」、「合作方」、「量產(chǎn)計劃」、「技術(shù)」以及「產(chǎn)品持久力」這幾個方面的綜合表現(xiàn)進行打分排名。
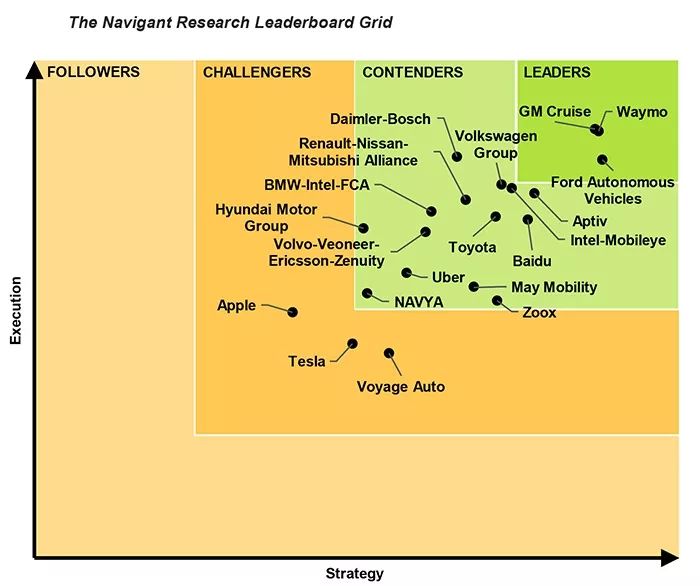
來源:Navigant Research
Waymo從2018年的第七位一躍成為今年的第一,從去年開始的大規(guī)模商業(yè)化試運營應該是其領(lǐng)先的重要原因。
既然決策層對于自動駕駛技術(shù)如此重要,難道一馬當先的Waymo公司背后,都是算法工程師嗎?
數(shù)字媒體公司The Information對Waymo的組織架構(gòu)進行了梳理。
在Waymo的950名員工中,工程研發(fā)團隊一共610人,其中340人屬于軟件團隊,260人屬于硬件工程團隊。而在340人的軟件團隊中,劃分是這樣的:
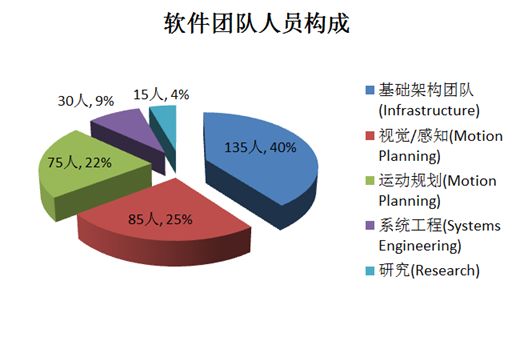
從軟件團隊的人員結(jié)構(gòu)可以看出,Waymo最重視基礎(chǔ)架構(gòu),研發(fā)自動駕駛主要依靠的是基礎(chǔ)架構(gòu)設(shè)施。這是因為,無論是深度學習還是仿真驗證,都需要大量的IT基礎(chǔ)架構(gòu)提供支持。
4、Waymo為何重視IT基礎(chǔ)架構(gòu)?
為什么基礎(chǔ)架構(gòu)設(shè)施這么關(guān)鍵呢?這就要從自動駕駛研發(fā)平臺遇到的一些挑戰(zhàn)說起了。
.
ADAS研發(fā)基礎(chǔ)架構(gòu)挑戰(zhàn)之一:海量非結(jié)構(gòu)化數(shù)據(jù)
ADAS/AD的研發(fā)需要基礎(chǔ)架構(gòu)提供海量數(shù)據(jù)和高帶寬的性能。傳感器的數(shù)據(jù)大多是非結(jié)構(gòu)化數(shù)據(jù),以圖像、視頻、點云文件、日志文件為主。面對不同的SAE級別,數(shù)據(jù)量的要求如下:
·L2級別的ADAS系統(tǒng),需要4-10PB的數(shù)據(jù)和1,000-5,000核的計算資源;
·L3級別的ADAS系統(tǒng),需要50-100PB的海量數(shù)據(jù)和5,000-25,000核的計算資源;
·到了L5級別實現(xiàn)完全自動駕駛,需要超過2EB級別的數(shù)據(jù)量。如果按照1TB的硬盤來計算的話,2EB的數(shù)據(jù)量相當于200萬個1TB的移動硬盤。
5、為什么需要這么多數(shù)據(jù)?
因為要訓練和測試足夠多的復雜場景。
Waymo首席科學家Dargo Anguelov在MIT的深度學習課程中第一次分享了自動駕駛研發(fā)遇到的一些挑戰(zhàn)和最佳實踐。
其中有幾個比較有趣的場景。
來源:Waymo
左圖一有幾個行人背著木板在行走,圖二是一個鏡面反射問題,圖三是一個人在騎馬。在這樣的場景下,深度學習如何更好地判斷周圍環(huán)境,不僅僅要求算法對物體進行識別,更要求識別復雜場景的能力。
面對這樣的復雜場景,如何保證算法的可靠性呢?
使用大量標注過的數(shù)據(jù)對深度學習網(wǎng)絡進行監(jiān)督訓練,使得物體感知甚至到對于復雜場景的識別成為可能,這些技術(shù)在Waymo自動駕駛研發(fā)過程中得到了大規(guī)模的應用。
Dargo也提出,隨著Waymo采集數(shù)據(jù)的場景增多,深度學習的算法也有了更頻繁的用處。
有了這么多數(shù)據(jù),如何對其進行管理?如何保證持續(xù)增長的數(shù)據(jù)量能夠被研發(fā)團隊最高效地使用?
這就是IT技術(shù)架構(gòu)能為ADAS/AD提供的核心競爭力。
來源:Waymo
研發(fā)基礎(chǔ)架構(gòu)挑戰(zhàn)之二——高性能和高帶寬的要求
眾所周知,深度學習需要對數(shù)據(jù)進行訓練,而且是多次重復調(diào)參的訓練。
要實現(xiàn)成熟的模型算法,僅有算法和數(shù)據(jù)是不夠的,更重要的要達到大量的算力性能要求,一個深度學習模型需要經(jīng)過多少次計算才能完成一次前饋啊!
除了大量GPU算力要求,我們還需要利用大量高帶寬性能讀取真實環(huán)境數(shù)據(jù),以進行仿真測試。Waymo研發(fā)部門每天會進行大量的仿真測試,回放真實采集的環(huán)境數(shù)據(jù),24×7地進行仿真測試,驗證算法的可靠性,確保系統(tǒng)的準確性。
這些真實環(huán)境數(shù)據(jù)每天都會被分類成不同的場景,從存儲中高帶寬地讀取到HPC服務器上,進行大量的仿真測試。
除了軟件在環(huán)(SiL),還有硬件在環(huán)的仿真測試。將真實的車載硬件設(shè)備加載算法,回放數(shù)據(jù),進行硬件在環(huán)的仿真測試。
硬件在環(huán)測試平臺(HiL)對于數(shù)據(jù)讀取的延遲要求非常高,需要在數(shù)百納秒和數(shù)微秒之間。如此小的延遲讓硬件在環(huán)仿真的實現(xiàn)變得非常具有挑戰(zhàn)性,也很難將仿真測試放到公有云上來實現(xiàn)。
在我們看到的仿真測試場景中,存儲帶寬要求竟高達800GB/s,這是因為研發(fā)團隊需要對數(shù)據(jù)進行并發(fā)讀取和回寫,才能保證研發(fā)周期。
-
傳感器
+關(guān)注
關(guān)注
2562文章
52566瀏覽量
763685 -
無人駕駛
+關(guān)注
關(guān)注
99文章
4152瀏覽量
122871
原文標題:你想要的自動駕駛汽車,為何遲遲不能出現(xiàn)?
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
無人駕駛技術(shù)未來在哪里?低速才是突破口

易控智駕無人駕駛技術(shù)再次取得新突破
無人駕駛解決方案包含哪些方面?感知、決策與控制
易控智駕發(fā)布礦山無人駕駛應用落地成果
華為云商專車無人駕駛,使能露天礦高質(zhì)量、智能化發(fā)展
DeepSeek眼中的礦山無人駕駛
為什么聊自動駕駛的越來越多,聊無人駕駛的越來越少?

中國最大露天礦無人駕駛項目驗收成功
小馬智行第六代無人駕駛Robotaxi亮相香港國際機場
首鋼水廠鐵礦無人駕駛礦卡實現(xiàn)常態(tài)化無人運行
UWB模塊如何助力無人駕駛技術(shù)
特斯拉推出無人駕駛Model Y
易控智駕無人駕駛項目落地紅沙泉露天煤礦
5G賦能車聯(lián)網(wǎng),無人駕駛引領(lǐng)未來出行

無人駕駛汽車應用晶振TSX-3225






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論