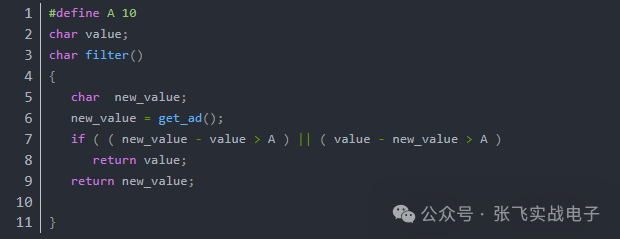
 基于場論的風險評估的方法正在被用于智能車的決策與控制
基于場論的風險評估的方法正在被用于智能車的決策與控制
清華大學汽車系教授王建強此前在美國留學的時候,受到愛因斯坦同一場論的啟發,借鑒了一種場的思想,提出了自己的風險評估方法,基于場論的行車風險辨識方法,建立了人-車-路綜合影響下的“行車安全場”統一模型。經過幾年的研究完善,他們建立了一個完整的理論體系,這個體系目前接近成熟。這個風險評估的方法正在被用于智能車的決策與控制。
前幾天,小編看到了一張總結“清華系自動駕駛”的表格,感嘆中國自動駕駛半壁江山都被清華系同學所占領。

今天小編就給大家分享一篇清華大學汽車系教授、汽車系副主任王建強老師的一篇報告,希望對讀者有所啟發。
什么是復雜的混合道路交通環境?
在我國,復雜的混合交通所指的是機動車、非機動車、行人組成的混合交通,這種混合交通引發的交通擁堵、交通事故增加、城市環境不斷惡化、運輸效益下降等一系列問題,嚴重地影響了道路交通秩序,降低了道路通行能力,增加了道路交通管理難度。
眾所周知,安全是混合交通中面臨的最主要問題,而道路交通安全受到人-車-路以及交通環境這四位一體的因素影響。在研究智能汽車駕駛在復雜的混合交通環境中如何評估風險成為至關重要的問題。
在復雜的混合交通環境中如何評估風險?
眾所周知,安全是混合交通中面臨的最主要問題,對交通事故產生的交通特點分析可知,混合交通條件下發生的交通事故占總數的5.9%,同時還是主要的死亡原因(占67.2%);當混合交通且缺少交通控制時,造成的交通事故占總數的50.8%,死亡人數占62.4%(1998)。
因此,研究智能汽車駕駛在復雜的混合交通環境中如何評估風險成為至關重要的問題。
那么究竟如何來進行風險評估呢?首先我們來看看目前是怎樣來做的?
現有的風險評價指標多樣,優劣各異,如:
時間指標:TTC(Time to Collision)、THW(Time Headway)等
動力學指標:安全距離(避撞)、最小加速度(避撞)
統計學指標:碰撞概率(避撞、路徑規劃)、機器學習(決策)
勢能場指標:勢能場(能)、行車安全場(避撞、規劃控制)
異常駕駛行為指標:超速、闖紅燈,疲勞駕駛(駕駛行為分析)

問題的根源在哪里呢?目前L2、L3自動駕駛技術開發相對程度,因為他們主要是針對某一個場景進行開發,比如追尾報警系統、主動避障系統、車道偏離預警系統等,根據具體的危險場景來開發,危險的場景和種類非常多,針對這樣的問題,我們需要考慮,一個一個安全系統的疊加會造成什么樣的問題?
這些系統在同一輛車上會不會存在沖突?
我們面臨的挑戰還有,我們面臨這種風險的因素是復雜的,包括駕駛人、車輛、環境等各種因素,各種因素我們如何進行統一的評估?因為不同因素所產生的對安全的影響是不同的,針隊這種問題,王建強此前在美國留學的時候就已經進行了深入思考,受到愛因斯坦同一場論的啟發,借鑒了一種場的思想,因此就提出了自己的風險評估方法,基于場論的行車風險辨識方法,建立了人-車-路綜合影響下的“行車安全場”統一模型。經過幾年的研究完善,他們建立了一個完整的理論體系,這個體系目前接近成熟。這個風險評估的方法正在被用于智能車的決策與控制。
什么是安全場模型?
交通風險影響因素有哪些?產生的機理是否一樣?顯然,不同的因素影響是不一樣的,為此我們把影響因素分成3種類別,一種是動態運動的目標,他所產生的風險,我們起了個名稱叫動能場;而道路中環境的因素,靜態的物體所產生的風險我們稱之為勢能場;另外重要的駕駛員行為所造成的風險我們稱之為行為場;將這三種場進行統一成為“行車安全場”統一模型。
這些風險模型是如何建立的呢?
動能場
運動場為表征道路中其他運動目標對自車行車風險影響程度大小的“物理場”。
大小與運動物體的屬性密切相關,比如說物體的運動的速度、類別、實際質量、運動的狀態等等,我們把這些因素統一叫做“虛擬質量”,同時也收到道路影響因素的影響,如道路的曲率、坡度等。
動能場
動能場中心處的場強最強,因為在中心處,如果其他車輛一直重合必然會發生交通事故,動能場在物體前進的方向更集中表明潛在風險更大。
勢能場
勢能場
勢能場為表征道路中靜止物體,對自車行車風險影響程度大小的“物理場”。
勢能場中心是靜態目標所在的位置,勢能場中心處場強最大,勢能場場強隨著物體距離減小而量指數式增加,勢能場場強隨著物體距離增大而減小,當距離增大到一定程度時場強不存在。
行為場
行為場
行為場為表征駕駛員風險因襲、車輛行為對行車風險影響程度大小的“物理場”。
駕駛員行為對自車行車造成的風險因素有很多如:駕駛員生理心理風險因素(疲勞駕駛、情緒駕駛)、認知風險因素(如錯誤估計車輛狀態)、技能風險因素(如駕駛技能不高)、違規風險因素(如交通法規及時薄弱)。這些因素我們可以統一用駕駛員風險因子來表達,所產生的風險,是通過駕駛員駕駛車輛所產生的。
因此我們把動能場、勢能場、行為場統一就建立了一個安全場統一模型,能夠不對不同交通要素的影響進行規范評價,從而可以實現對整體交通環境的風險量化評估。
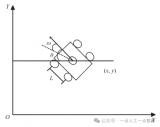
例如,圖中紅色車輛的風險為周邊要素對它所形成的場力的合力所形成的,合力越大所產生的風險越大,場的物理的形態我們可以通過圖的右側圖形看出來。
在復雜的混合交通環境中如何進行智能決策?
智能決策方法——學習人類的決策機制
形車風險評估是實現智能決策的前提,但智能車決策依然存在一系列難題:
① 現有的智能汽車決策算法真的智能嗎?能夠完全被駕駛人所接受嗎?
② 現有的駕駛決策算法滿足駕駛人的駕駛需求嗎?
③ 駕駛人在駕駛過程中的決策只是與避免風險有關嗎?
我們發現目前人類駕駛相比無人駕駛更能適應紛繁復雜的交通環境?因此,現在很有必要研究駕駛人類的駕駛決策機制。這里的研究并不是研究人腦決策機制,而是通過人類駕駛的行為的表現來研究駕駛員的行為決策機制。把決策機制的學習結果用于無人車的決策中,這是這里的研究思路。
人類駕駛行為遵循最小作用量原理
首先用16臺數據采集車,行駛10萬公里,采集了1500小時的有效人類自然駕駛行駛數據。用這組數據對車頭時距(THW)、橫向位置(D)和加速度(a)進行了一個統計分析,發現結果存在一種極值現象,即THW=1.5S,D=0m,a=0m/s,這種極值的啟發意義是我們發現符合最小作用量原理。
物理學中通常利用小作用量原理來描述自然界中的極值現象。最小作用量原理是與對稱性、守恒定律同等重要的最原始、最基本的概念,還是物理學中最具概括性的原理,是重大物理學問題的根源所在。
如果用S來代作用,這一原理可以簡潔的表達為δS=0。今為止的所有物理規律,均可由它表達。
因此可以用最小作用量原理來闡釋和描述人類的駕駛行為。
人類駕駛遵循的基本原則是“趨利避害”,“利”即追求安全和高效,“害”就是防止危險的發生。
進一步分析,橫向加速度在追求安全的過程中為什么會存在極值?是因為人類駕駛其實是在追求安全與效率的一種平衡;縱向加速度從實際統計中的結果發現也符合一樣的道理,極值是追求的平衡點,減速是為了保障安全,加速是為了追求高效。車頭時距為什么能夠保持在一個平衡范圍內?因為車頭時距過小就會存在一些潛在的危險,過大就會降低行車的效率。
通過這樣的分析,駕駛員操控的行為為,不論在橫向還是縱向上都在追求一種平衡的極值。
基于這樣的分析,我們就可以用最小作用量來表征駕駛員的操作極值。
將作用量用物理模型表征方法如下:
上圖中,小球的例子表示,如果力超過一定的限值,車輛就會失控,車輛就會飛出運動的軌跡,如果再約束的范圍內車輛就可以順利的到達目的地。
基于這樣的物理模型,我們就可以用最小作用量原理來對車輛進行最佳的駕駛決策。
為驗該思想,進行大量實驗
自然駕駛數據分析結果
首先進行自然駕駛數據采集,在自然駕駛數據中提取了7631段幀號連續的跟車過程,通過計算各個過程的距離平均作用量,發現平均作用量分布較為集中,駕駛人的車過程中的決策行為趨于穩定。
實車實驗
實驗采用的是課題組的三調實驗平臺車,分別為:一輛本田雅閣車(作為車i)和兩輛長安悅用車(作為車j和車k),實驗分為自由行駛、跟車行駛和鄰車切入三個場在昌平區水南路進行。
實車實驗數據分析結果
上圖說明絕大多數駕駛員都能控制在一個穩定值,實際上駕駛員的操作與理論值都有一些偏差,風險的判別就是看偏差的大小,如果超出一定的值危險就會發生。
按照19個作用量的大小來進行排序,發現另外一個現象,即為了分析駕駛人駕駛過程中的實際作用量S和理論的最小作用量S’之間的關系,我們計算S的均值和方差發現,S的均值越大,方差越大。當駕駛過程滿足作用量為最小值S’時,方差為0。可以看到,因此,如果評價一個駕駛員的駕駛水平和駕駛技能,優秀的駕駛員可以用實際駕駛作用量與理論值的接近程度來衡量。
進一步的驗證,可用KW驗證方法,對六種行為過程的S與S’進行對比分析,結果顯示所有過程中的P- valuel都遠大于0.05,說明駕駛人在這六種行為過程中的實際作用量S與理論的最小作用量S’之間沒有顯著性差異。
在這個基礎上用安全性和高效性的聯合評價指標——Dse來判斷行車的危險,實際作用量S和理論最小作用量S’之間的差異程度是影響寫過程中安全性和高效性的關鍵因素。為了分析兩者間的關系,定義Dse為行驗過程中安全和高效的聯合評價指標,并用歸一化形式描述。
實車實驗數據分析結果(跟車與切入場的加減速過程)
切入過程中的Dse高于跟車過程,制動過程中的Dse高于加速過程,且切入場中的制動過程Dse值最高(圖d),說明切入場景的相較跟車場更復雜也更危險,制動過程相較加速過程更易出現行車風險。
通過實車實驗數據證明:駕駛人的決策機制遵循最小作用量原理。因此在這樣的理論之下,就可以把人類的決策行為用于智能車的決策當中。
基于最小作用量原理的決策方法
在感知的基礎上基于場論進行風險評估,在評估風險的基礎上,基于最小作用量原理來實現模擬人的智能決策。
風險評估方法既可以用于綜合性的風險評、也可以用于路徑的規劃,而最小作用量可以用于復雜場景下的協同決策。
未來成果應用
應用框架
自動駕駛系統
交通風險監控系統
交通設施設計評估
智慧城市——智慧交通
-
智能車
+關注
關注
21文章
409瀏覽量
77447 -
智能汽車
+關注
關注
30文章
3060瀏覽量
108219 -
自動駕駛
+關注
關注
788文章
14226瀏覽量
169771
原文標題:在復雜交通環境下智能汽車行駛風險評估與智能決策
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
華為乾崑智能車云服務通過CCRC IT產品信息安全認證
智能車淺談——手把手讓車跑起來(電磁篇)

華為與7家伙伴達成智能車控模組合作意向
芯馳科技升級智能座艙與智能車控芯片產品線
呱呱三人談 | 快 or 準?競賽車手激辯智能車黑科技!
DLP3010工作區域array大約多少溫度呢?是否存在風險?
面向教學科研的智能車設計及實踐實驗室

北京 3月28日-29日《產品EMC設計分析與風險評估技術》高級研修班,報名火熱進行中!


復雜環境下多無人智能車輛協同調控

20.0-電磁桿的組裝和實物介紹“這個是就是你想要的“-智能車電磁組 電磁循跡小車
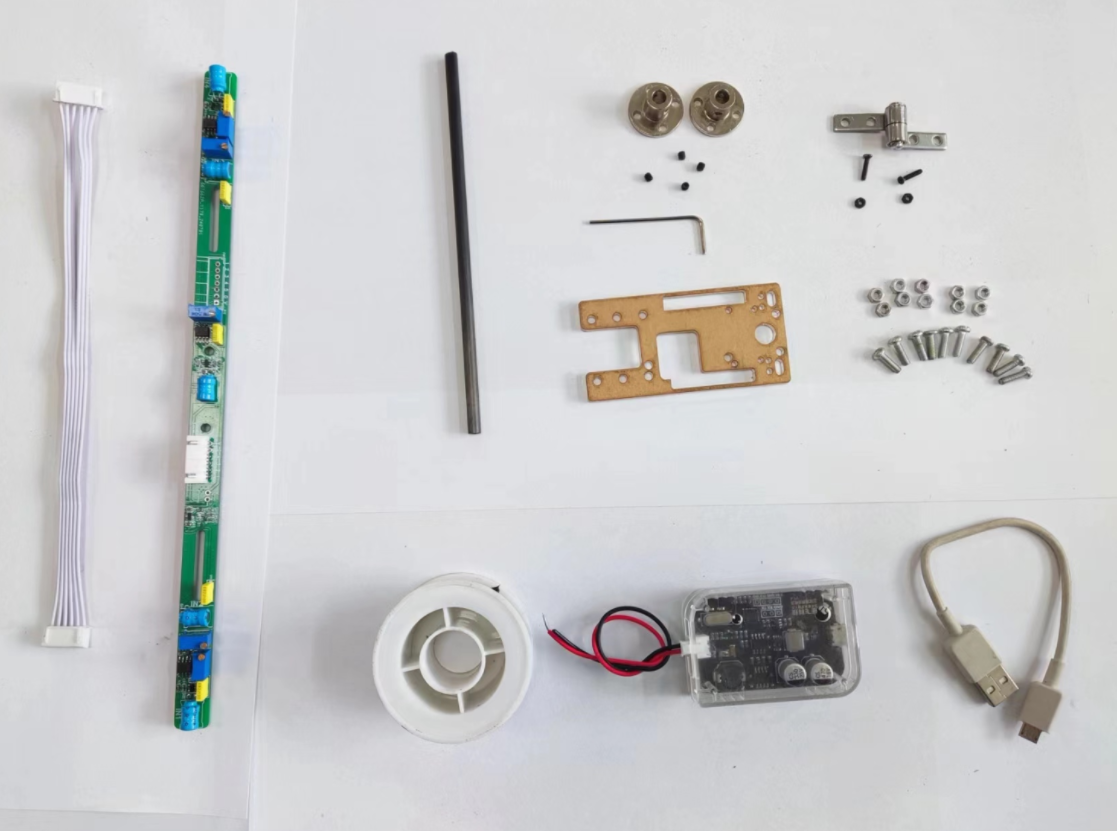
20.3-使用兩個通道進行電磁循跡 智能車競賽 電磁桿原理圖 電磁循跡小車 STM32電磁小車 電磁循跡算法

20.2-電磁桿在磁軌道的測試 零基礎入門智能車競賽 STM32電磁小車






 工商網監
工商網監
評論