 智能車路協同試驗車開發服務
智能車路協同試驗車開發服務
概述
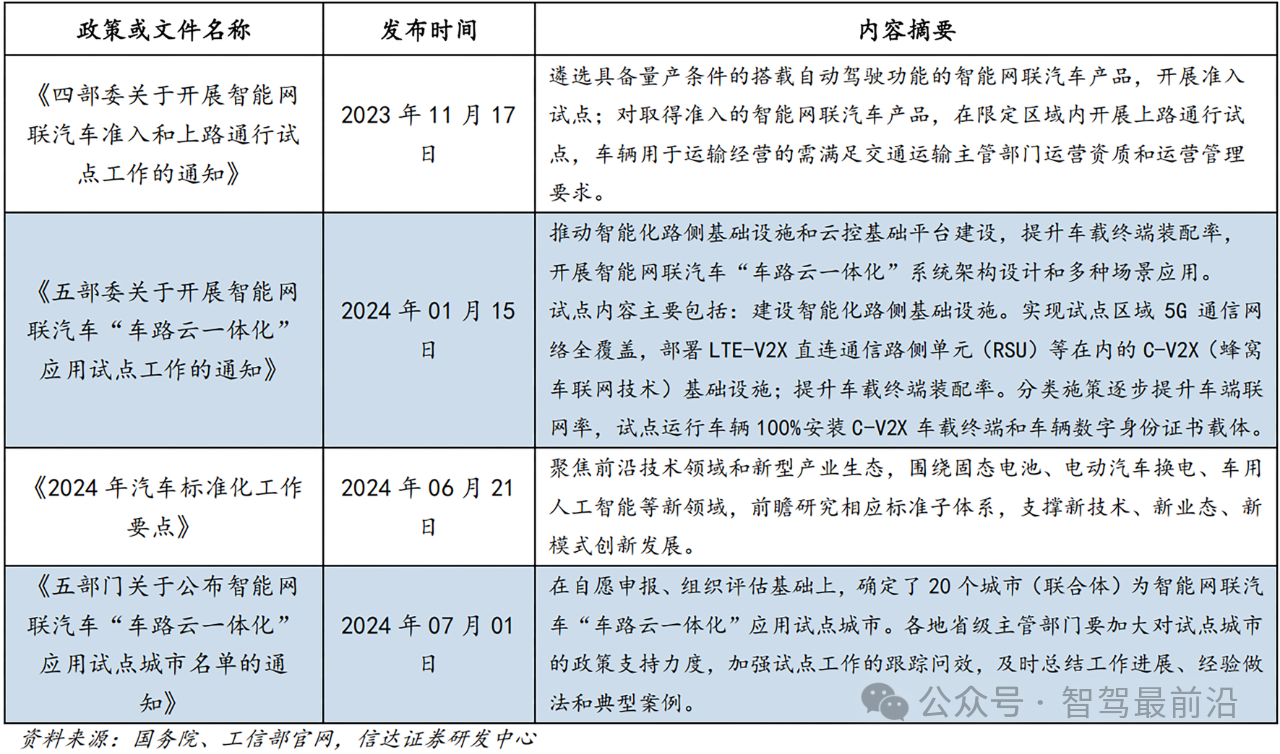
近年來,盡管自動駕駛技術在研發和商業化方面已取得顯著進展,但為了解決“單車智能”存在的駕駛安全性和運行ODD(操作設計域)受限等問題,我國提出了車路云一體化發展戰略,積極推動智能網聯汽車與新能源、智能交通、智慧城市等領域的融合發展。
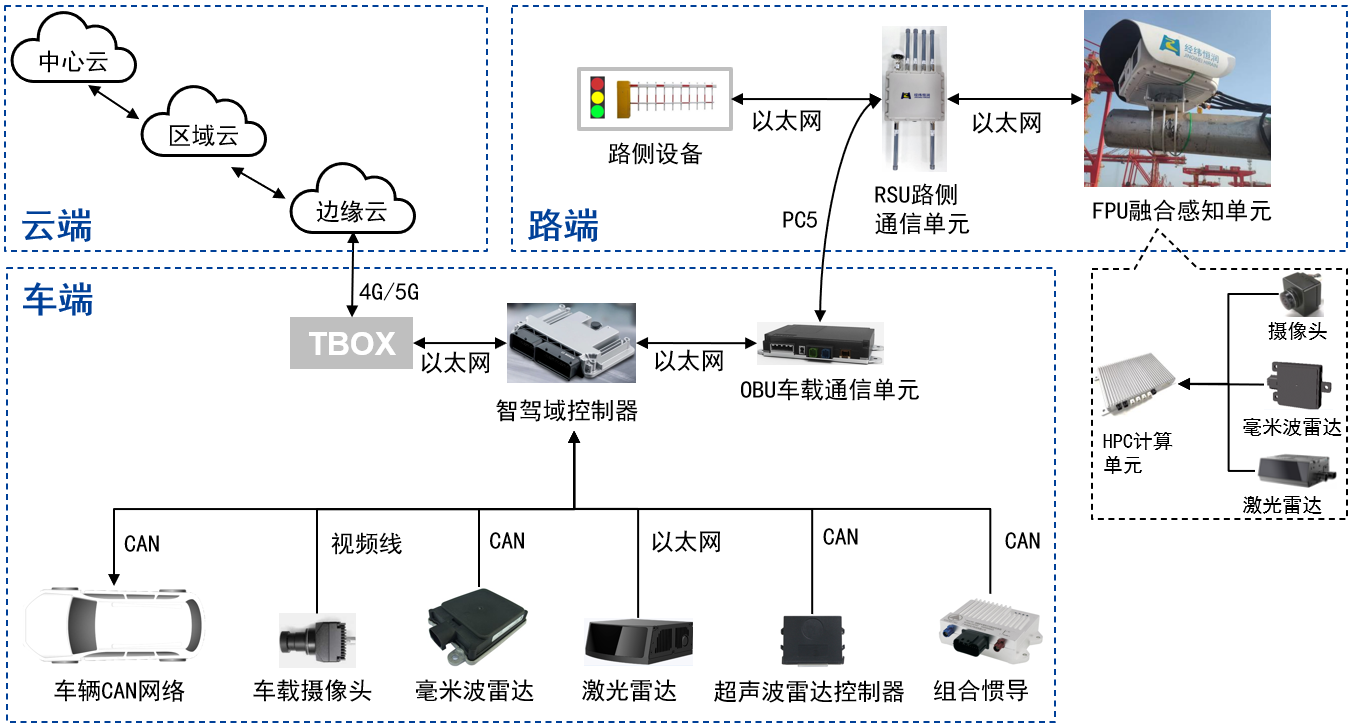
經緯恒潤推出的智能車路協同試驗車能夠提供智能駕駛樣車、智能駕駛域控制器及V2X設備,可以滿足車路協同測試的需求。用戶可在此平臺上開發協同感知、協同決策和協同控制等功能,并進行車路協同基本功能的測試。
產品組成
- 車路協同試驗樣車
- 智能駕駛域控制器
- OBU(車載單元)/RSU(路測單元)/FPU(融合感知單元)
- 智能駕駛基礎軟件
方案特點
- 試驗車配備了前裝智駕傳感器,這些傳感器與車輛高度集成,確保了系統的安全性和可靠性
- OBU(車載單元)和智能駕駛域控均為車規級控制器,具有更強的可靠性、耐久性和環境適應性
- OBU和RSU(道路邊緣單元)均支持PC5協議,實現了車與車、車與路之間的通信,同時增強了系統的可擴展性
- 通過FPU(融合感知單元)對交通參與者、地圖及道路狀況的檢測,以及車路通信,提供了單車智能的車路協同基礎能力。V2X系統提供的基本消息包括:
— 基本安全消息:包含車輛的基本信息
—路側安全信息:提供周邊交通參與者的實時狀態信息
—交通參與者、道路障礙物和交通事件的感知共享消息
—個體安全消息:包含弱勢交通參與者的基本信息
—信號燈相位與配時消息:包括一個或多個路口信號燈的當前狀態
—地圖消息:涵蓋局部區域的地圖信息
—路側交通消息:包含交通事件信息及交通標志信息
—路側協調消息:為車輛提供引導信息和駕駛決策支持
—停車場地圖消息:包含場站內道路信息、車位信息以及場站內引導信息
—RTCM差分增強信息:提供高精度定位增強信息
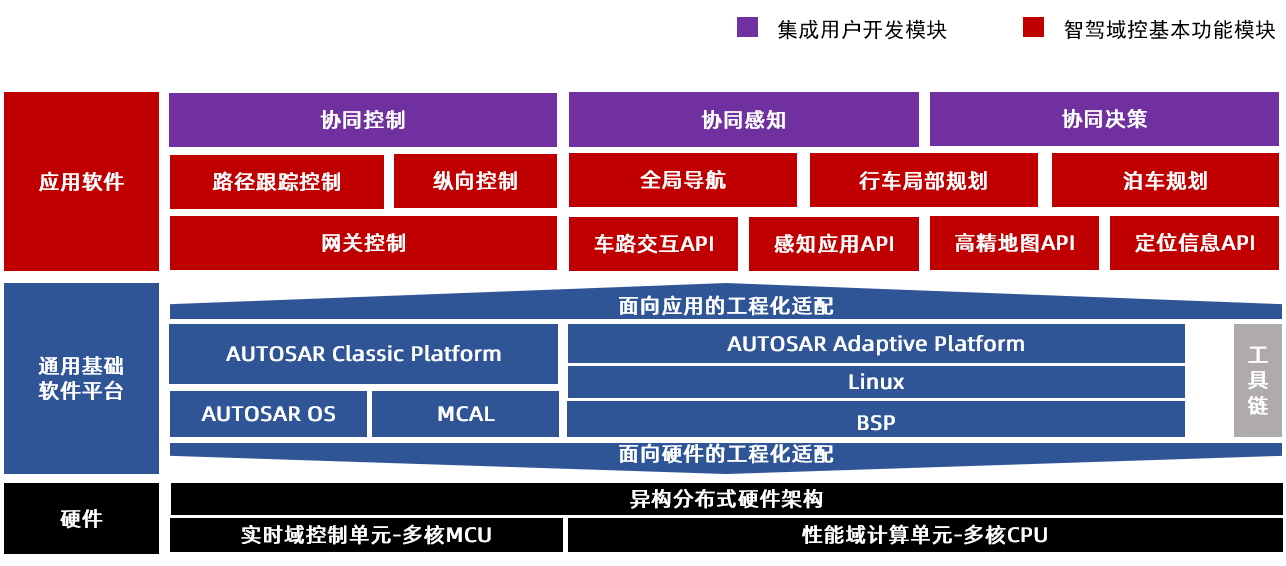
- 智能駕駛域控的基礎功能如下:
—提供多傳感器融合感知目標接口
—提供組合慣導定位接口
—提供高精地圖API
—提供全局導航功能
—提供行車局部路徑規劃功能及目標軌跡接口
—提供泊車局部路徑規劃功能及目標軌跡接口
—提供與車載通信單元OBU交互接口
—提供與車輛其他控制器單元交互的網關控制
—提供路徑跟蹤控制功能及接口
—提供縱向控制功能及接口
—可集成協同控制算法
—可集成協同決策算法
—可集成協同感知算法
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
智能駕駛
+關注
關注
4文章
2774瀏覽量
49682 -
車路協同
+關注
關注
1文章
60瀏覽量
4109 -
經緯恒潤
+關注
關注
1文章
371瀏覽量
2204
發布評論請先 登錄
相關推薦
熱點推薦
智能車電磁組——基本控制篇
智能車電磁組——基本控制篇前言電磁車的控制比較簡單,可以分為信號采集,舵機控制和電機控制三部分,電磁車的控制算法也主要圍繞這三部分進行,剛開始起步可能對這三個模塊的要求不高,但是隨著車速的不斷提高
智慧路燈桿如何實現車路協同輔助自動駕駛?
路燈桿究竟是如何實現車路協同,為自動駕駛提供有力支持的呢? 智慧路燈桿的功能與布局 智慧路燈桿作為智慧城市的重要基礎設施,已不再僅僅承擔照明的單一功能。它集成了多種先進的傳感器、通信設備和智能
智能網聯和車路協同有何區別?誰更具優勢?
?隨著自動駕駛技術的不斷發展,車路協同(V2X,Vehicle-to-Everything)和智能網聯(IoV,Internet of Vehicles)這兩個概念逐漸進入公眾視野。二
2025年,為什么車路協同“降溫了”?
進入2025年,自動駕駛行業正處于產業變革與技術重塑的道路上。過去幾年,車路協同(V2X)與智能網聯技術一度被視為自動駕駛不可或缺的組成部分。但隨著技術發展與市場需求的變化,智駕最前沿
車路云協同如何讓Robotaxi加速實現
隨著人工智能、大數據、車聯網等技術的深度融合,智能駕駛技術正在邁入快速發展的關鍵階段。作為高級別自動駕駛的典型應用場景,Robotaxi通過其車路
V2X車路協同系統
V2X車路協同系統作為經緯恒潤高級別智能駕駛業務自動駕駛系統的有力支撐,實現了對無人駕駛車輛運行區域內交通情況的實時感知以及V2X通信。

V2X車路協同系統
V2X車路協同系統作為經緯恒潤高級別智能駕駛業務自動駕駛系統的有力支撐,實現了對無人駕駛車輛運行區域內交通情況的實時感知以及V2X通信

V2X車路協同系統
V2X車路協同系統作為經緯恒潤高級別智能駕駛業務自動駕駛系統的有力支撐,實現了對無人駕駛車輛運行區域內交通情況的實時感知以及V2X通信


20.3-使用兩個通道進行電磁循跡 智能車競賽 電磁桿原理圖 電磁循跡小車 STM32電磁小車 電磁循跡算法
20.3-使用兩個通道進行電磁循跡 智能車競賽 電磁桿原理圖 電磁循跡小車 智能車電磁組 STM32電磁小車 電磁循跡小車 電磁循跡算法 智能車環島 智能車比賽規則 歸一化處理 差比和

20.2-電磁桿在磁軌道的測試 零基礎入門智能車競賽 STM32電磁小車
20.2-電磁桿在磁軌道的測試 零基礎入門智能車競賽 智能車競賽 電磁桿原理圖 電磁循跡小車 智能車電磁組 STM32電磁小車 電磁循跡小車 電磁循跡算法 智能車環島

黑芝麻智能正式加入智能網聯汽車“車路云一體化”應用建設
黑芝麻智能目前已圍繞華山A1000芯片形成車-路全棧能力,成為國內少數可同時交付車、路雙端感知和車
車路云協同,這次它真的來了嗎?
隨著科技的快速發展,“車路云協同”正在悄然發生變化。我們離科幻電影《機械公敵》中威爾?史密斯駕駛的汽車能準確甄別交通狀況并調整行駛狀態的時代就要來了嗎?背景說明“車






 工商網監
工商網監
評論