 智能網聯和車路協同有何區別?誰更具優勢?
智能網聯和車路協同有何區別?誰更具優勢?

隨著自動駕駛技術的不斷發展,車路協同(V2X,Vehicle-to-Everything)和智能網聯(IoV,Internet of Vehicles)這兩個概念逐漸進入公眾視野。二者雖然都致力于提升交通效率和安全性,且從名詞定義上看,這兩個技術很像,很多小伙伴在談及這兩個技術時,也會混淆在一起,但這兩個技術核心與發展路徑卻截然不同,今天智駕最前沿就帶大家來厘清這兩個概念!
車路協同:路側單元的信息交互
車路協同(Cooperative Vehicle-Infrastructure System, CVIS)是通過車輛與外部環境的信息交互,達到提升交通效率與安全性的目的。其核心理念是讓車輛不再是單一的感知與決策主體,而是依靠與道路基礎設施、其他車輛以及行人的協同作用,共享全局信息,優化駕駛決策。這種模式的實現高度依賴于基礎設施的部署,包括路側單元(RSU)、邊緣計算節點和通信網絡等技術設施。
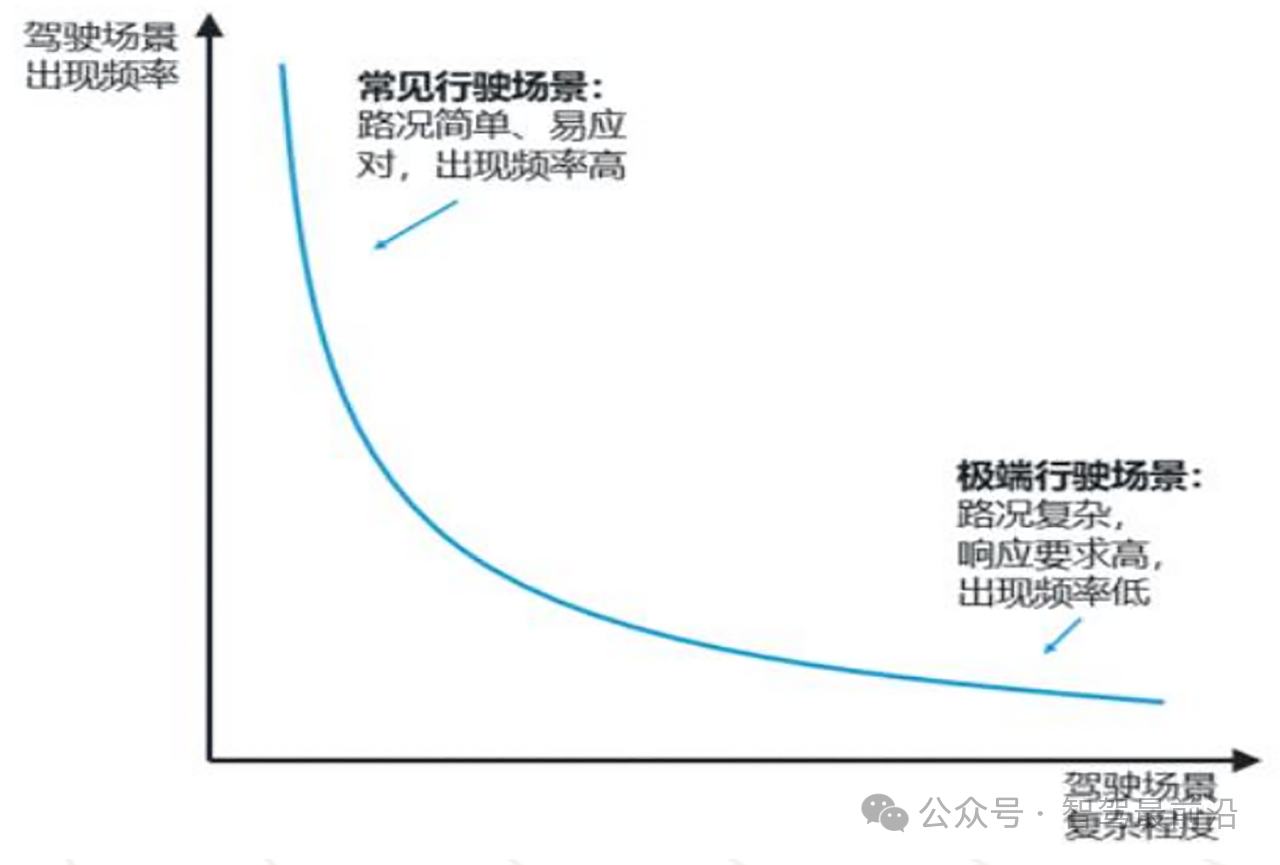
在車路協同系統中,路側單元(RSU)作為重要的感知與交互節點,安裝在道路兩旁或關鍵路段,負責采集包括交通流量、道路狀況和環境信息在內的多種數據,并通過專用短程通信(DSRC)或蜂窩車聯網(C-V2X)技術與車輛進行信息交互。這些設備不僅能夠彌補車輛自身傳感器的盲區,還可以通過實時數據更新為每輛車提供精準的行車信息,譬如出現前方交通擁堵狀況、潛在的危險物體以及動態交通信號燈的變更等場景時,車路協同技術可以提前讓相關道路上的車輛知曉,并對行駛安排及時做出調整。與單車智能不同的是,這些信息并非局限于車輛周圍的環境,而是涵蓋了更大范圍的道路和交通狀況,從而實現全局優化。
通信技術是車路協同系統的核心。傳統的DSRC技術依賴Wi-Fi協議,能夠實現車輛與RSU之間低延遲、高可靠性的近距離通信,但受限于通信范圍,更多適用于短距離信息交互場景。而C-V2X技術作為近年來的技術升級方案,基于4G和5G蜂窩網絡,不僅具備更大的覆蓋范圍和更強的抗干擾能力,還能夠支持車輛與云端的實時交互。特別是在5G低時延、高帶寬的特性加持下,C-V2X為車路協同提供了堅實的通信保障。
高精度定位與多傳感器融合技術也在車路協同中起到關鍵作用。傳統的GNSS(全球導航衛星系統)定位精度通常受限于復雜城市環境的遮擋或多路徑干擾,而車路協同通過引入路側高精度定位設備與地圖匹配算法,可以將定位精度提高至厘米級別,從而保證車輛在動態復雜環境中的安全性和決策準確性。這些定位能力不僅服務于車輛,還為行人和非機動車提供精確的位置服務,進一步減少潛在交通事故。
邊緣計算與云計算技術也在車路協同中被充分應用。路側設備可以在本地進行簡單計算任務,從而減輕云端的負擔,并降低通信延遲。如在高速公路的入口匝道,邊緣節點能夠實時分析交通流信息,并向進入主路的車輛發送速度建議,減少擁堵和事故風險。而云端則負責全局性的交通優化,通過對城市級交通數據進行深度分析,為道路規劃、信號燈控制和應急響應提供決策支持。
車路協同是以基礎設施為核心,強調全局信息的共享與協同優化。它不僅能為車輛提供單車感知無法獲得的信息,還能通過實時的交通管理提升整個道路網絡的運行效率。在自動駕駛系統中,車路協同技術尤其適用于復雜路段、交通流量大的區域以及高風險路況,為高級別自動駕駛(L4/L5)的實現奠定了基礎。
智能網聯:車聯網的信息交互
智能網聯(Internet of Vehicles, IoV)是一種以車輛為信息終端,通過車內外信息的采集、傳輸和處理,提升車輛智能化和聯網能力的技術體系。相比于依賴道路基礎設施的車路協同,智能網聯更加強調單車的自主感知、計算和決策能力,并通過網絡實現與外界的信息交互。這種終端導向的模式使得車輛在具備獨立感知和計算能力的同時,能夠與云端及其他車輛進行信息共享,最終實現更高效、更智能的駕駛體驗。
車載終端是智能網聯技術的核心,它通常集成多種傳感器、通信模塊以及高性能計算單元,用于實時感知周圍環境并處理包括前方障礙物的位置、交通標志的識別以及道路車道線的檢測等復雜數據。通過這些數據,車輛能夠構建周圍環境的實時數字化模型,從而為自動駕駛或駕駛輔助系統提供支持。車載終端的通信模塊可以通過蜂窩網絡(如4G、5G)將車輛與外部世界連接,實現車輛與云端、其他車輛以及智能設備的高效信息交互。
通信技術在智能網聯中發揮著至關重要的作用。傳統的4G通信已經能夠滿足基本的信息傳輸需求,而5G的出現為智能網聯帶來了顯著的技術飛躍。5G通信以其低時延、高帶寬和大規模設備連接的能力,使得車輛能夠在毫秒級的時間內完成信息交換。這對于自動駕駛等對實時性要求極高的應用場景至關重要。如當車輛行駛至復雜交叉口時,5G網絡可以將云端的交通流信息、實時導航數據以及紅綠燈狀態快速下發至車輛,從而幫助其完成更加安全高效的駕駛決策。
大數據與人工智能技術也是智能網聯系統的重要支柱。車輛通過車載傳感器和終端設備采集海量的駕駛行為、交通流以及環境數據,并將這些數據上傳至云端進行分析與建模。基于人工智能算法,云端可以實現對交通狀態的精準預測以及駕駛行為的智能優化。如現在手機端的智能導航系統,能夠根據實時交通數據動態調整駕駛路線,幫助車輛避開擁堵路段;而駕駛行為分析系統可以為駕駛員提供個性化的安全建議,進一步降低事故風險。這些功能的實現,使得智能網聯車輛不僅能夠適應復雜的道路環境,還能夠為用戶提供更加便捷和智能的出行服務。
智能網聯技術的實施相對靈活,不需要依賴大規模的道路基礎設施改造即可部署。基于現有的蜂窩通信網絡和車載終端,車輛能夠快速接入智能網聯生態系統,從而推動技術的快速普及。這種終端導向的模式也為車輛制造商和技術供應商提供了更大的創新空間,使得智能網聯系統可以根據不同用戶的需求提供如車載娛樂系統、遠程車輛診斷以及自動駕駛輔助功能等定制化的功能與服務。
智能網聯是以車為中心,通過車內傳感器與云端技術的結合,實現了車輛智能化與聯網能力的全面提升。它的終端導向特點,使其在無需大規模基礎設施建設的前提下,便能迅速落地并發揮作用。在推動自動駕駛發展的過程中,智能網聯以其靈活性與可擴展性成為一項極具潛力的核心技術,為未來的智慧交通系統奠定了重要基礎。
技術差異:基礎設施依賴與自主能力
車路協同與智能網聯在技術實現上最顯著的差異體現在基礎設施依賴與自主能力的平衡。車路協同的技術架構高度依賴外部基礎設施,尤其是路側單元(RSU)、通信網絡、邊緣計算節點和高精度定位設備等,構建了一個車輛與道路環境實時交互的信息共享網絡。這種模式將道路環境信息的感知任務部分外包給基礎設施,從而彌補了車輛傳感器的感知盲區,提高系統的全局感知能力。車路協同的技術優勢在提升交通安全性和道路通行效率方面尤為突出,尤其是在大規模部署后,其整體效能更為顯著。
與之相比,智能網聯則更加依賴單車的自主感知與計算能力,強調車輛作為獨立個體在復雜道路環境中的生存與決策能力。通過集成激光雷達、毫米波雷達和高分辨率攝像頭等多種傳感器,智能網聯車輛能夠構建全面的環境感知模型。這種高度依賴車載硬件和軟件系統的模式,使得智能網聯車輛可以在缺乏外部基礎設施支持的情況下,依靠自身完成路徑規劃和動態決策。智能網聯車輛通過與云端的連接,獲得實時更新的地圖數據、交通狀況和行車建議,這種云端賦能進一步增強了車輛的自主性。與車路協同相比,這種架構對單車的硬件性能和計算能力提出了更高要求,也使得車輛的成本相應增加。
基礎設施依賴的差異也體現在通信技術的選擇與應用上。車路協同更傾向于構建一個由RSU主導的區域化通信網絡,通過DSRC或C-V2X實現車輛與道路設施的高效通信。這種模式的優點在于通信路徑相對固定,延遲較低,適合區域化、高密度的交通信息交互場景。而智能網聯則依托蜂窩通信網絡(4G/5G),實現車輛與云端及其他車輛的實時信息交互。5G技術的低時延和高帶寬特性彌補了傳統通信網絡的不足,使智能網聯車輛能夠快速響應動態復雜的環境信息,同時適應更大范圍的部署需求,這也意味著智能網聯的可靠性在一定程度上依賴于通信網絡的覆蓋與質量,在一些偏遠地區可能面臨信號不足的挑戰。
定位技術的應用差異進一步體現了兩者在基礎設施與自主能力之間的技術權衡。車路協同通過在路側部署高精度定位設備,結合GNSS和差分定位技術,為車輛提供厘米級的精準定位服務。這種方式通過外部設備補償了車輛自身定位能力的不足,但需要大規模的基礎設施投入和成本投入,想要普遍應用仍有很長的一段路要走。而智能網聯則更多依賴車載定位系統與多傳感器融合算法,如慣性導航系統(INS)與高精地圖相結合,在道路標志識別和地圖匹配的輔助下實現高精度定位。這種自我感知能力雖然減少了對外部設備的依賴,但對車輛傳感器和計算系統的精度要求極高,且在遮擋環境中易受多路徑干擾的影響。
誰更具優勢?
在探討車路協同和智能網聯誰更具優勢時,需要結合技術實現的深度和適用場景進行分析。
| 技術維度 | 車路協同 | 智能網聯 |
| 核心目標 | 依賴路側基礎設施實現全局協同優化 | 強調單車智能化及聯網能力 |
| 通信方式 | V2X(DSRC、C-V2X) | 蜂窩網絡(4G/5G)、WiFi |
| 定位技術 | 高精度GNSS、路側補償 | 車載GNSS與傳感器融合定位 |
| 覆蓋范圍 | 強依賴于路側設備的部署 | 不依賴固定設施、覆蓋范圍靈活 |
| 典型場景 | 十字路口協同通行、交通流優化 | 自適應巡航、智能導航、個性化服務 |
| 技術成本 | 高:需大規模建設RSU與邊緣計算設備 | 較低:依賴現有的網絡與車端終端 |
車路協同依托道路基礎設施的強大感知能力和信息交互網絡,使其在提升全局交通效率和安全性方面具有顯著優勢。在高度復雜的交通環境中,車路協同通過路側單元(RSU)和邊緣計算節點感知宏觀的交通流動態,并將全局優化后的信息發送給車輛。特別是在大規模車輛接入的情況下,這種系統能夠實現車與車、車與路之間的信息協同,從而降低擁堵和事故的概率。
智能網聯的優勢在于其高度靈活性和獨立性。相比車路協同,智能網聯更加注重單車的自主能力,通過集成多種傳感器和高性能計算硬件,能夠在沒有外部基礎設施支持的情況下完成感知與決策。對于低基礎設施覆蓋的地區或需要快速部署的場景,智能網聯顯然更具適應性。
從技術成熟度和現階段的可行性來看,智能網聯在短期內或許具有一定優勢。其依托現有的蜂窩網絡,能夠快速實現規模化應用,而無需等待道路基礎設施的大規模建設。智能網聯高度依賴單車的計算性能和傳感器精度,這意味著車輛成本較高,且在面對感知盲區或極端天氣時可能存在性能瓶頸。車路協同的發展壁壘主要在于成本,想要實現車路協同,需要在路側加裝大量的通信設備,其資金投入和時間投入是非常大的,但一旦建成,能夠從系統層面提升交通效率和安全性。特別是在實現L4或L5級自動駕駛的遠期目標中,車路協同的全局感知和優化能力將發揮更大的作用。
未來,兩種技術模式可能會逐步融合,從而實現優勢互補。智能網聯以車輛的自主能力為基礎,為個體提供精確的感知與決策支持;而車路協同通過基礎設施的全局視角,進一步優化道路網絡的整體運行效率。在城市交通、高速公路等需要精細化管理的場景中,車路協同可能更具競爭力;而在基礎設施建設受限或用戶追求成本效益的場景中,智能網聯的靈活性和低依賴性使其更具吸引力。因此,車路協同與智能網聯的優勢并非絕對,而是需要根據具體的技術條件、經濟成本和應用需求進行綜合權衡。
審核編輯 黃宇
-
車聯網
+關注
關注
76文章
2656瀏覽量
92723 -
智能網聯
+關注
關注
4文章
623瀏覽量
23652 -
車路協同
+關注
關注
1文章
60瀏覽量
4161
發布評論請先 登錄

兆越高精度時間同步交換機為車路云一體化建設加碼

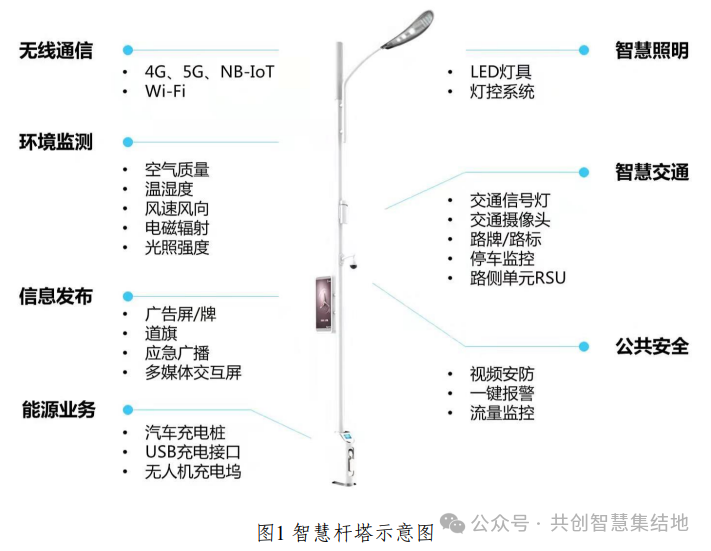
智慧路燈桿如何實現車路協同輔助自動駕駛?
2025年,為什么車路協同“降溫了”?
“車路云一體化”系統方案,賦能智能網聯汽車規模化落地?
如祺出行入選智能網聯車路云一體化典型案例
車路云協同如何讓Robotaxi加速實現
V2X車路協同系統


C-V2X安全證書:保障車路云系統通信安全的關鍵

黑芝麻智能正式加入智能網聯汽車“車路云一體化”應用建設
經緯恒潤打造智能網聯汽車“車路云一體化”解決方案,助力試點城市建設落地






 工商網監
工商網監
評論