") 通過控制繼電器達到控制交流伺服電機轉(zhuǎn)速
通過控制繼電器達到控制交流伺服電機轉(zhuǎn)速
伺服電機屬于控制電機,它分為直流伺服電機和交流伺服電機兩種。由于交流伺服電機具有體積小,重量輕,大轉(zhuǎn)矩輸出,低慣量和良好的控制性能等優(yōu)點,已廣泛應用于自動控制系統(tǒng)和自動檢測系統(tǒng)中作為執(zhí)行元件,將控制電信號轉(zhuǎn)換為轉(zhuǎn)軸的機械轉(zhuǎn)動。由于伺服電機的定位精度相當高,現(xiàn)代位置控制系統(tǒng)已越來越多地采用以交流伺服電機為主要部件的位置控制系統(tǒng)。這里的設計也正是通過控制繼電器的閉合、斷開,而達到控制脈寬大小的目的,通過閉環(huán)控制非標準交流伺服電機的滑動磁塊的位移,利用磁場變化達到控制電機轉(zhuǎn)速的目的。
1 交流伺服電機控制系統(tǒng)設計方案
系統(tǒng)使用的交流伺服電機為三相交流電機;驅(qū)動器控制U/V/W三相電形成電磁場;轉(zhuǎn)子在此磁場的作用下轉(zhuǎn)動,同時電機由接近傳感器將轉(zhuǎn)速信號反饋給驅(qū)動器;驅(qū)動器根據(jù)反饋值與目標值進行比較,調(diào)整轉(zhuǎn)子轉(zhuǎn)動的角度。伺服電動機又稱執(zhí)行電動機,在自動控制系統(tǒng)中,用作執(zhí)行元件,把所收到的電信號轉(zhuǎn)換成電動機軸上的角位移或角速度輸出。
2 系統(tǒng)硬件設計
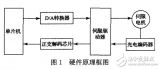
本項目實質(zhì)上采用STC89C52RC單片機構建一個最小系統(tǒng),實現(xiàn)脈寬可調(diào)輸出控制兩個繼電器,實現(xiàn)電機正反轉(zhuǎn)智能控制,從而實現(xiàn)伺服電機的精確位移控制。控制系統(tǒng)組成如圖1所示。
通過按鍵輸入電機所需的轉(zhuǎn)速值并與轉(zhuǎn)速傳感器反饋回來的電機轉(zhuǎn)速相比較,采用PID算法,經(jīng)單片機處理后,轉(zhuǎn)化成相應的脈沖信號,再經(jīng)光電耦合器調(diào)節(jié)繼電器的開度,通過調(diào)節(jié)繼電器的脈沖寬度,達到脈寬的調(diào)制,從而控制伺服電機上的磁塊正負位移,使電機達到給定的轉(zhuǎn)速值,同時單片機接受固定在伺服電機轉(zhuǎn)軸上的轉(zhuǎn)速傳感器隨著電機轉(zhuǎn)動而產(chǎn)生的反饋脈沖信號,并在LED實時顯示電機的實際轉(zhuǎn)速。
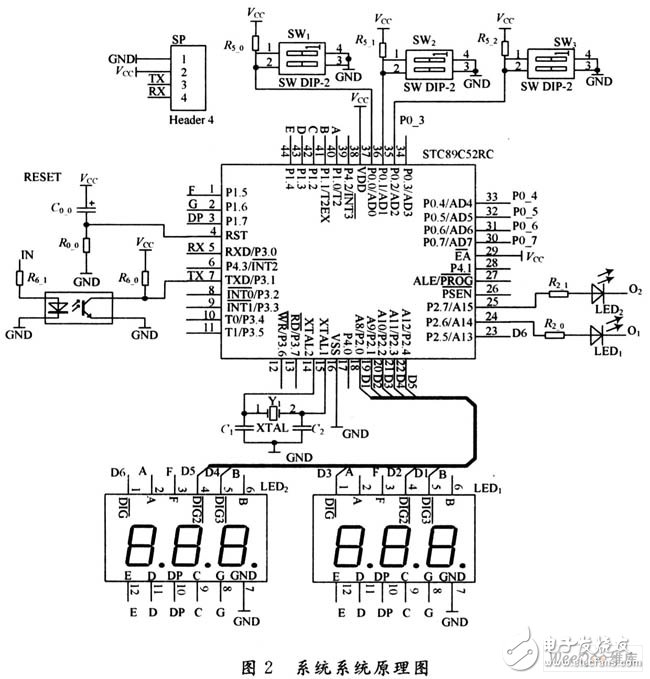
2.1 單片機控制器的硬件設計
在此開發(fā)了一套運動控制器的軟件系統(tǒng)。該系統(tǒng)的硬件結(jié)構是基于單片機而開發(fā)的,所用功能為外部中斷、定時中斷、檢測傳感器脈沖信號、及輸入/輸出等。STC89C52RC的P0.0,P0.1,P0.2端口分別作為按鍵SET、按鍵MOVE、按鍵UP的輸入口,通過STC89C52定時器T0的定時中斷控制脈沖發(fā)送頻率,進而控制電機的轉(zhuǎn)速。系統(tǒng)原理圖如圖2所示。
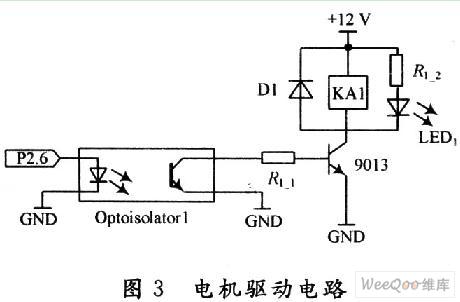
2.2 驅(qū)動部分電路的硬件設計
由于單片機屬于TTL電路(邏輯1和0的電平分別為2.4 V和0.4 V),其I/O口輸出的開關量控制信號電平無法直接驅(qū)動電機,所以在P2.6口控制升速信號輸出端需加入驅(qū)動電路;同理該驅(qū)動電路也應用于P2.7口的降速輸出端。系統(tǒng)采用光耦耦合器和晶體管作驅(qū)動,由光電耦合器輸出通道傳入控制電機,所以具有很強的抑制噪聲干擾能力,起隔離作用,可防止強電磁干擾;晶體管主要起功率放大作用。電機驅(qū)動電路如圖3所示。
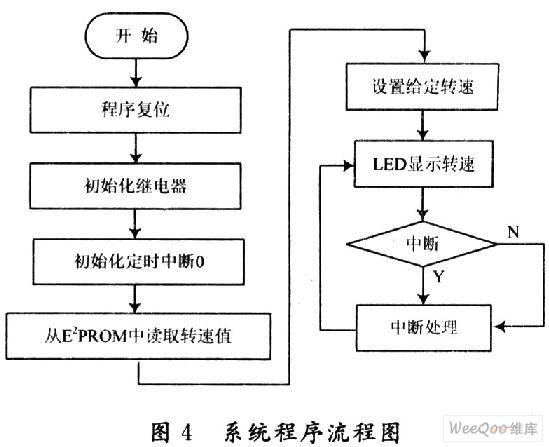
3 系統(tǒng)軟件設計
控制器的軟件主要完成LED顯示,接受鍵盤輸入,實現(xiàn)伺服電機勻速運行和繼電器控制幾項功能,包括主程序、按鍵中斷服務程序、定時器T0中斷服務程序及LED顯示子程序。在交流伺服電機控制系統(tǒng)中,單片機的主要作用是產(chǎn)生脈沖序列,它是通過STC89C52RC的P3.2口發(fā)送的。系統(tǒng)軟件編制采用定時器定時中斷產(chǎn)生周期性脈沖序列,不使用軟件延時,不占用CPU。CPU在非中斷時間內(nèi)可以處理其他事件,惟有到了中斷時間,才驅(qū)動伺服電機轉(zhuǎn)動一步。系統(tǒng)程序流程圖如圖4所示。
3.1 按鍵預置子程序
面板上有3個鍵與該子程序相關,它們是SET,MOVE和UP,其功能分別是:SET用來確定設定位,共有4位,包括個位、十位、百位和千位;MOVE用來選擇那一位;UP控制被控位的增加,每次增加,在0~9之間循環(huán)。當用戶確定其輸入時可按鍵SET,程序便根據(jù)輸入的值確定伺服電機工作時的給定轉(zhuǎn)速,最后,將設定值存人對應的變量中,按鍵子程序流程如圖5所示。
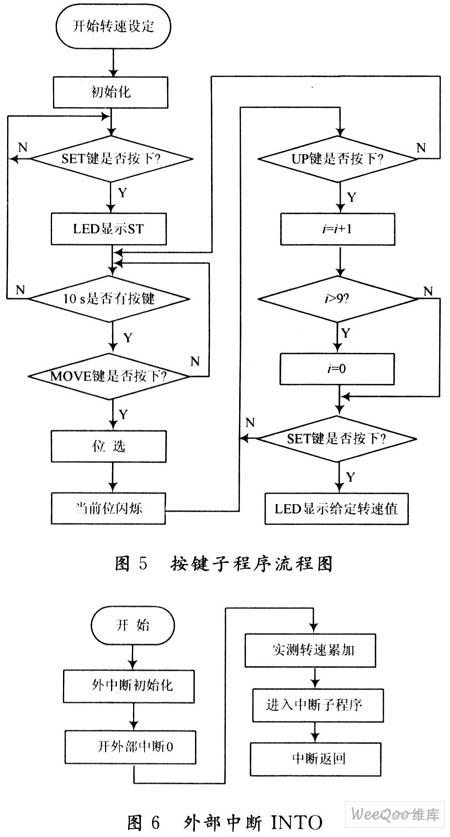
3.2 定時中斷服務子程序
電機每轉(zhuǎn)動1圈,單片機就中斷1次。通過檢測兩次中斷的時間間隔,即通過定時器的計數(shù),就可以算出電機轉(zhuǎn)速。為了實現(xiàn)轉(zhuǎn)速檢測需將轉(zhuǎn)速中斷配置為最高中斷優(yōu)先級INTO。中斷計數(shù)的程序框圖如圖6所示。
3.3 轉(zhuǎn)速的PID控制算法
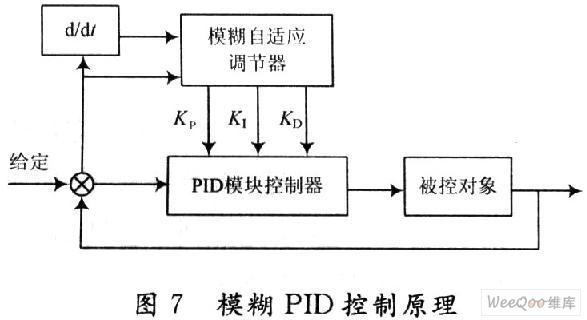
作為模糊控制和PID控制相結(jié)合的產(chǎn)物,模糊自適應PID控制除具有調(diào)速范圍寬,調(diào)節(jié)速度快和不要求掌握受控對象的精確數(shù)學模型等優(yōu)點外,還具備結(jié)構簡單、容易實現(xiàn)的特點。根據(jù)直線電機位置運動規(guī)律,模糊自適應PID控制的基本思想是:當誤差大時,需加大誤差控制作用的權重,以快速消除誤差,提高系統(tǒng)響應速度;當誤差小時,需加大誤差變化量控制作用的權重,以避免超調(diào)使系統(tǒng)盡快進入穩(wěn)態(tài)。根據(jù)上述規(guī)律,可設計模糊自適應PID控制系統(tǒng)的模糊推理規(guī)則表。表1給出KP的模糊調(diào)整規(guī)則實例。其中,e(k)和△e(k)分別為位置誤差及其變化量。模糊推理規(guī)則形式為:

模糊自適應PID控制的原理如圖7所示。
模糊PID的參數(shù)調(diào)整值為:

式中:j為規(guī)則條件語句的條數(shù),j=1,2,…,n;ukxy(Cx)為各規(guī)則語句中Kx的隸屬度;Cx為參數(shù)x所取得的模糊子集模糊論域的中心值。
在實現(xiàn)了電機轉(zhuǎn)速的實時檢測之后,就可以采用閉環(huán)控制來調(diào)節(jié)電機的轉(zhuǎn)速。轉(zhuǎn)速的控制框圖如圖8所示。
其計算如式(2)所示:

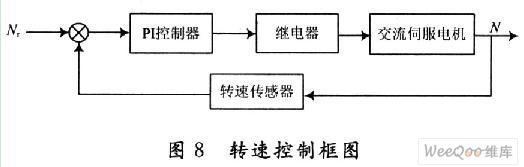
式中:Nr為由按鍵設定的轉(zhuǎn)速;N為實際的轉(zhuǎn)速輸出值。PI控制器由STC89C52RC單片機通過編程實現(xiàn)實際轉(zhuǎn)速與設定轉(zhuǎn)速之間的控制偏差△N。
4 結(jié) 語
該系統(tǒng)研究以單片機作為控制器,對非標準交流伺服電機進行控制,有效利用單片機內(nèi)部資源以及詳細了解相應電機運動控制系統(tǒng)的運行特性,在生產(chǎn)調(diào)速電機的配套裝置實際應用中,降低了系統(tǒng)的成本,提高了系統(tǒng)的性能。
-
繼電器
+關注
關注
133文章
5425瀏覽量
150892 -
電機
+關注
關注
143文章
9248瀏覽量
148333 -
電磁場
+關注
關注
0文章
797瀏覽量
47866
發(fā)布評論請先 登錄
基于單片機控制的交流伺服電機轉(zhuǎn)速控制系統(tǒng)的設計與實現(xiàn)
交流伺服電機轉(zhuǎn)速是由什么控制? 看完就明白了
伺服電機控制轉(zhuǎn)速與干擾防御措施
總結(jié):伺服電機控制轉(zhuǎn)速與干擾防御措施






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論