 從運動感知到有效執行控制的關鍵為什么是IMU?
從運動感知到有效執行控制的關鍵為什么是IMU?

無人機穩定飛行、機器人精準控制及工業自動化都需要高精度、高可靠的運動感知,感知數據質量不足或延遲,無法有效支撐高精度、高響應的閉環控制。這類設備都會使用IMU進行運動感知,但高性能慣性測量的需求與項目嚴格的成本預算之間卻出現了難以調和的矛盾。
ER-MIMU-M01A MEMS IMU憑借其卓越性能與可控成本,打破“高性能=高成本”的行業痛點,成為復雜動態環境中不可或缺的“運動神經中樞”。
微型化封裝與高集成度
采用先進的MEMS工藝,將三軸陀螺儀與三軸加速度計高度集成于僅23.7mm x 23.7mm x 9.9mm的超緊湊空間內,重量控制在25克以下。這種極致的微型化設計使其能夠輕松嵌入空間受限的無人機飛控、機器人關節或自動化移動平臺中,顯著優化系統結構布局。
高性能慣性傳感器
陀螺儀其測量范圍達±450°/s,可覆蓋無人機高速旋轉、機器人急轉向、工業機械臂快速擺動等動態場景的需求。全溫零偏≤36°/h,零偏不穩定性≤2°/h,配合≤0.15°/√h 的角隨機游走特性,在長時間運行中(如無人機長航時飛行、機器人自主導航),它能提供極其穩定的角速率測量,有效抑制姿態解算的累積漂移,保障航向和姿態信息的長期可信度。
加速度計±16g 的測量范圍可應對設備劇烈運動(如無人機快速拉升、機器人跌落緩沖)的加速度感知需求。全溫零偏≤3mg,零偏不穩定性≤0.025mg,零偏穩定性(1σ)≤0.2mg,這種超低噪聲特性使其能夠精確捕捉微小的線加速度變化(如機器人的精細動作、無人機的抗風擾控制),為速度和位置估算提供基礎數據。
姿態穩定與敏捷控制
角速度和加速度數據是飛控算法實現精準姿態估計(滾轉、俯仰、偏航)和高速率閉環控制的基礎,保障無人機在強風擾動下的穩定懸停、實現復雜的特技飛行和敏捷避障。
機器人轉向時,陀螺儀反饋轉向角速度,結合加速度計數據計算位移,確保機器人沿預設路徑行駛;安裝在機器人的關節運動中,IMU 能感知關節旋轉角度與加速度,配合伺服電機實現平滑運動,提升人機交互安全性,指導機器人調整步態、轉向或保持平衡。
集成于機械臂關節或腿部,實時測量連桿的角速度和加速度,實現更精準的運動軌跡跟蹤、碰撞檢測以及先進的力/位混合控制,提升操作的柔順性和安全性。
ER-MIMU-M01代表了現代慣性傳感技術的先進水平。其完美契合無人機、機器人及自動化裝備對核心運動感知單元嚴苛的要求。它不僅為系統提供了精確、可靠、實時的運動信息流,更是實現自主智能、精準控制和高可靠運行的關鍵部件。
審核編輯 黃宇
-
傳感器
+關注
關注
2565文章
52995瀏覽量
767371 -
機器人
+關注
關注
213文章
29735瀏覽量
212859 -
自動化
+關注
關注
29文章
5784瀏覽量
84851 -
無人機
+關注
關注
231文章
10843瀏覽量
186768
發布評論請先 登錄
IMU 能為無人機提供什么數據?
適用于無人機的 IMU 有哪些要求?

從1ms到10ms,看懂EtherCAT與CANopen控制周期的關鍵差別!

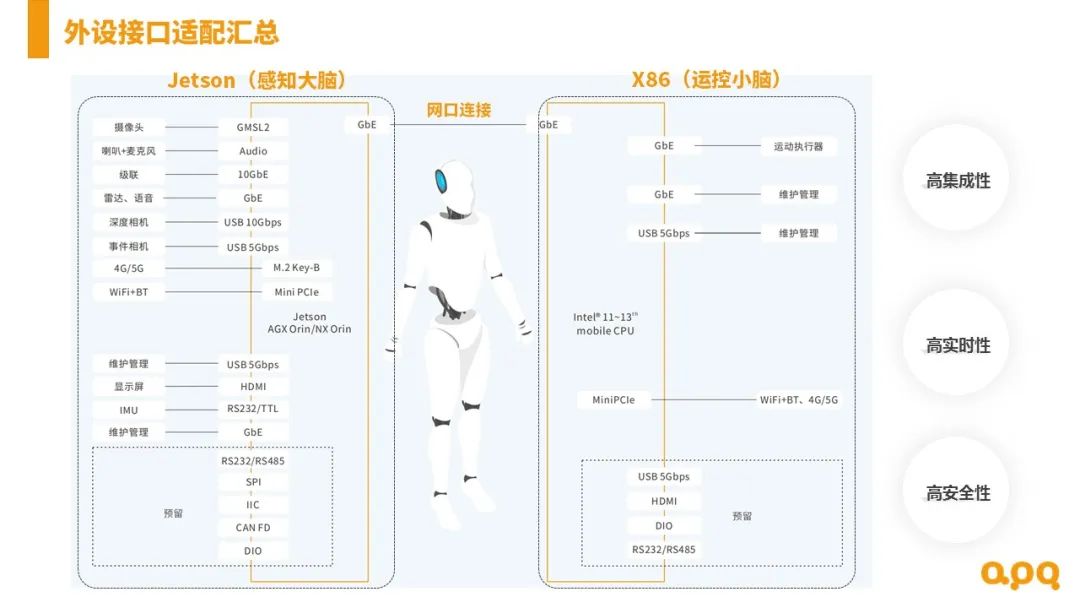
從感知到運控:具身智能機器人控制器的雙腦協同設計與場景適配
從控制到感知,一文讀懂納芯微的人形機器人布局(下篇)

從 “執行工具” 到 “智能伙伴”:工業機器人的 AI 進化之路
從控制到感知,一文讀懂納芯微的人形機器人布局(上篇)

基于EFISH-SBC-RK3576的運動控制與姿態感知方案
從“事后追溯”到“事前預警”:云翎智能巡檢記錄儀風險管控升級

中國科學技術大學團隊突破非接觸心臟活動感知技術
從姿態到飛行控制,IMU全方位守護無人機飛行

【網絡研討會】掌握FLIR IIS工業相機的色彩處理:從感知到精準
3.5元12米運動感知5.8G雷達模塊 小體積低成本






 工商網監
工商網監
評論