") EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)技術(shù)解析與匯川SV660F伺服應(yīng)用實(shí)踐
EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)技術(shù)解析與匯川SV660F伺服應(yīng)用實(shí)踐

EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)技術(shù)解析與匯川SV660F伺服應(yīng)用實(shí)踐
EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)的技術(shù)解析與應(yīng)用場(chǎng)景
在工業(yè)自動(dòng)化領(lǐng)域,不同協(xié)議之間的互聯(lián)互通是實(shí)現(xiàn)設(shè)備協(xié)同的關(guān)鍵環(huán)節(jié)。EtherCAT與Profinet作為兩大主流工業(yè)以太網(wǎng)協(xié)議,分別憑借其高速實(shí)時(shí)性與廣泛兼容性占據(jù)重要地位。然而,當(dāng)系統(tǒng)中需同時(shí)兼容兩種協(xié)議時(shí),網(wǎng)關(guān)設(shè)備便成為解決協(xié)議差異的核心橋梁。本文以EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)接匯川SV660F伺服系統(tǒng)的應(yīng)用為例,從技術(shù)原理、設(shè)備配置到實(shí)際工程案例,深入解析如何通過網(wǎng)關(guān)實(shí)現(xiàn)目標(biāo)速度的精準(zhǔn)控制。

一、技術(shù)原理:協(xié)議轉(zhuǎn)換與數(shù)據(jù)透?jìng)?/p>
EtherCAT協(xié)議以其分布式時(shí)鐘同步和短周期數(shù)據(jù)更新特性,適用于對(duì)實(shí)時(shí)性要求極高的場(chǎng)景(如高速運(yùn)動(dòng)控制);而Profinet協(xié)議則依托標(biāo)準(zhǔn)以太網(wǎng)架構(gòu)和靈活的拓?fù)浣Y(jié)構(gòu),在復(fù)雜網(wǎng)絡(luò)環(huán)境中表現(xiàn)出色。兩者的差異主要體現(xiàn)在數(shù)據(jù)幀結(jié)構(gòu)和通信調(diào)度機(jī)制上。
EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)的核心作用在于實(shí)現(xiàn)協(xié)議的“翻譯”與“透?jìng)鳌保?/p>
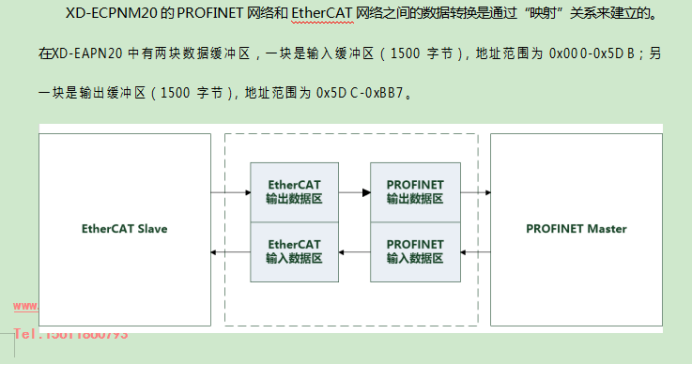
協(xié)議解析層:將EtherCAT主站的周期性通信幀轉(zhuǎn)換為Profinet可識(shí)別的格式,同時(shí)保留實(shí)時(shí)性要求;
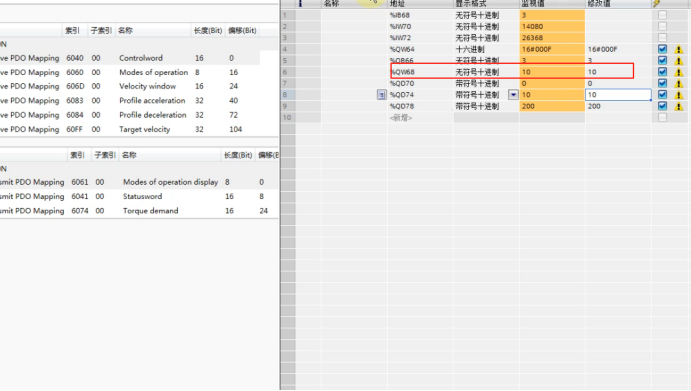
數(shù)據(jù)映射層:通過配置參數(shù)表,將匯川伺服驅(qū)動(dòng)器的目標(biāo)速度、加速度等指令與Profinet網(wǎng)絡(luò)的IO變量綁定;
設(shè)備配置:EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)與伺服的協(xié)同參數(shù)
目標(biāo)速度與反饋倍率
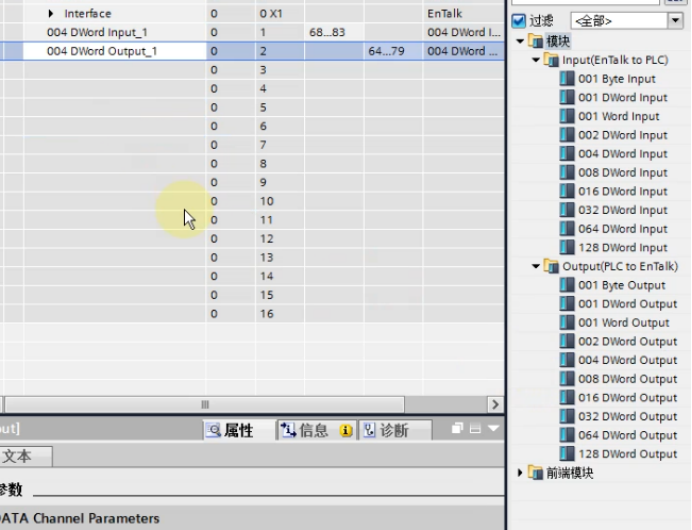
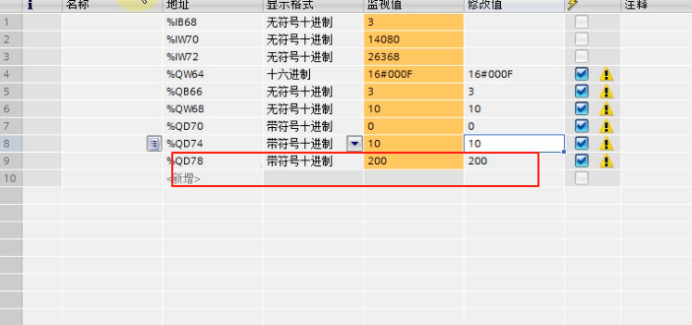
目標(biāo)速度:需在EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)配置界面中,將EtherCAT主站設(shè)定的速度值(如rpm或角度/秒)映射為Profinet的PLC控制字。網(wǎng)關(guān)需將其轉(zhuǎn)換為匯川伺服可識(shí)別的“速度給定值”。
加速度與速度限制
EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)需支持分段加速度控制,將EtherCAT的S曲線加減速模式轉(zhuǎn)換為Profinet的梯形加減速指令,避免伺服電機(jī)因加速度突變產(chǎn)生抖動(dòng)。
應(yīng)用案例:包裝生產(chǎn)線的速度協(xié)同控制
某食品包裝產(chǎn)線中,EtherCAT主站負(fù)責(zé)協(xié)調(diào)機(jī)械臂與傳送帶的同步動(dòng)作,而匯川伺服驅(qū)動(dòng)的封口機(jī)需通過Profinet接入系統(tǒng)。痛點(diǎn)在于:EtherCAT的1ms周期與Profinet的10ms周期存在兼容性問題,導(dǎo)致封口機(jī)速度波動(dòng)。

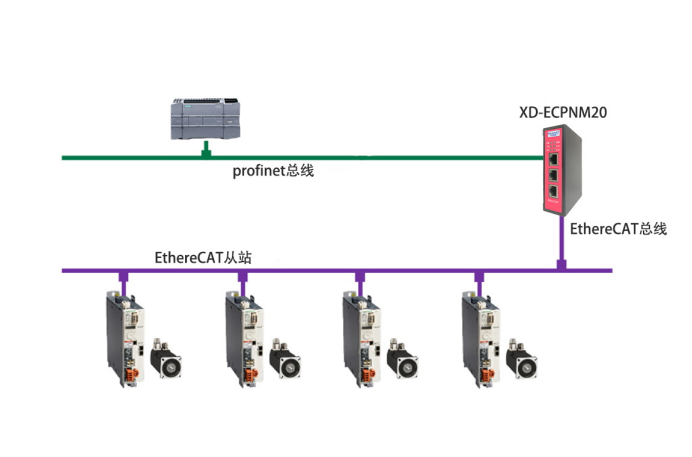
網(wǎng)關(guān)部署:將EtherCAT主站的網(wǎng)線接入EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)的EC側(cè)接口,Profinet側(cè)通過交換機(jī)連接匯川伺服的PN端口。
接地與抗干擾:EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)與伺服的金屬外殼需單獨(dú)接地,避免信號(hào)耦合干擾;若現(xiàn)場(chǎng)存在變頻器,需加裝磁環(huán)抑制電磁噪聲。
EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)參數(shù)設(shè)置:
在EC側(cè)配置EtherCAT主站的IP地址與周期時(shí)間;
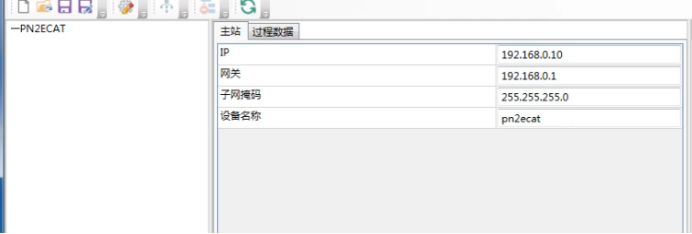
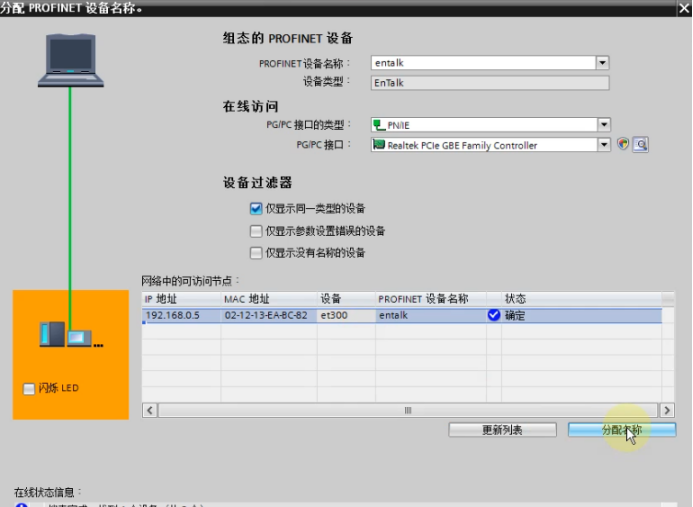
在PN側(cè)定義匯川伺服的設(shè)備名(如“Sealer_Axis”),并綁定速度控制字(如MW10)與狀態(tài)反饋?zhàn)郑ㄈ鏜W20)。
結(jié)語(yǔ):EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)的落地應(yīng)用,不僅解決了協(xié)議壁壘,更通過參數(shù)優(yōu)化與工程實(shí)踐,實(shí)現(xiàn)了匯川伺服目標(biāo)速度的精準(zhǔn)控制。這一技術(shù)路徑為工業(yè)自動(dòng)化設(shè)備的互聯(lián)互通提供了可復(fù)用的參考方案。
審核編輯 黃宇
-
網(wǎng)關(guān)
+關(guān)注
關(guān)注
9文章
5659瀏覽量
52974 -
Profinet
+關(guān)注
關(guān)注
6文章
1689瀏覽量
25450 -
ethercat
+關(guān)注
關(guān)注
19文章
1114瀏覽量
40022
發(fā)布評(píng)論請(qǐng)先 登錄
EtherCAT轉(zhuǎn)Profinet網(wǎng)關(guān)在匯川伺服轉(zhuǎn)矩控制中的集成應(yīng)用與實(shí)現(xiàn)

EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)連接匯川伺服系統(tǒng)的操作模式控制技術(shù)方案
EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)接匯川伺服實(shí)現(xiàn)速度控制功能
EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)接匯川伺服操作模式的控制解析
基于EtherCAT轉(zhuǎn)Profinet網(wǎng)關(guān)接匯川伺服系統(tǒng)操作模式控制技術(shù)方案

禾川伺服驅(qū)動(dòng)器與EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)的雙向數(shù)據(jù)交換
IS620N伺服驅(qū)動(dòng)器與EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)通訊案例
SV660F伺服驅(qū)動(dòng)器與EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)通訊案例
EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)如何把匯川伺服接入到西門子plc
EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)與禾川伺服驅(qū)動(dòng)器X4E快速通訊案例
EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)接禾川伺服與PLC通訊的深度解析
EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)接禾川伺服X4E系列通訊案例
EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)接禾川伺服驅(qū)動(dòng)器X5E快速配置案例
EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)接IS620N伺服驅(qū)動(dòng)器與西門子plc通訊案例
號(hào)外!PLC安川伺服,通過Profinet轉(zhuǎn)EtherCAT網(wǎng)關(guān)同步多個(gè)工作站






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論