 為什么高端無人機不會在IMU精度上妥協?
為什么高端無人機不會在IMU精度上妥協?

姿態控制精度與系統集成度現已成為制約無人機性能提升的關鍵瓶頸。無人機通過IMU集成的陀螺儀與加速度計,實現對三維空間姿態(角速度、加速度)數據的實時測量,數據傳遞至飛控系統,能得到無人機的姿態、速度、位移等信息,無人機穩定飛行的核心依賴于IMU的精度與可靠性。
ER-MIMU-063 MEMS IMU打破了傳統慣性測量器件在體積與性能間的權衡困境,內部集成陀螺儀,加速度計,磁力計,為無人機飛控系統提供了兼具高精度運動感知與極致集成化的解決方案。
極致微型化與輕量化設計
采用最新的MEMS陀螺技術,尺寸縮減至38.6mm×44.8mm×25.5mm,重量≤70g。緊湊結構便于集成至狹小的載荷艙或飛控系統中,適配多類型機型。輕量化可直接降低機身負載,優化續航能力。
高精度運動感知性能
陀螺儀測量范圍為±400o/s,零偏不穩定性 < 0.1°/h,角隨機游走<0.05°/√h,在長航時任務中,陀螺儀輸出偏差小,顯著延緩慣性導航系統的誤差累積,確保姿態解算平滑穩定,減少微小抖動的干擾。
加速度計測量范圍為±30g,零偏重復性100μg,零偏穩定性<50μg,為速度推算和位置積分提供堅實基礎。
ER-MIMU-063 是九軸IMU,測量的數據實時反饋,讓無人機能依據指令,做出平穩飛行、精準懸停、靈活轉向等動作。可以讓飛控系統實時監測無人機的俯仰、橫滾及航向。
成本優勢:在保證高性能的同時,價格比STIM300 更低。對于無人機制造商和廣大愛好者來說,這意味著更低的生產成本和使用門檻。
姿態穩定
當無人機遭遇陣風干擾時,IMU可立即檢測到姿態偏移(如滾轉角度突變),并將數據傳輸至飛控系統,驅動電機調整力矩,實現快速姿態恢復。
當無人機發生碰撞、電機失效等故障時,IMU 可通過突變特征快速識別異常,觸發應急降落程序。
輔助導航與定位
當無人機進入隧道、城市峽谷等GNSS 信號弱區時,IMU可以在非常短的時間內提供相對精確的導航信息,避免飛行失控。
ER-MIMU-063 以微型化、高精度、高可靠性的技術特性,成為無人機飛控系統的 “神經中樞”。其不僅滿足無人機的航拍穩像需求,更在工業級無人機的自主導航、精準作業中發揮關鍵作用。
審核編輯 黃宇
-
無人機
+關注
關注
231文章
10843瀏覽量
186758 -
IMU
+關注
關注
6文章
363瀏覽量
46719
發布評論請先 登錄
IMU 能為無人機提供什么數據?
適用于無人機的 IMU 有哪些要求?

愛普生M-G370PDS慣性測量單元在無人機導航中的應用

2025第九屆世界無人機大會:維愛普濾波器與磁環助力無人機發展
九軸 IMU:賦能無人機,開啟智能飛行新紀元
無人機高端芯片盤點:效率>95%!遠翔 LED驅動芯片FP7195助力系留無人機長航時照明

《手把手教你做星閃無人機—KaihongOS星閃無人機開發實戰》系列課程課件匯總
革新無人機導航:如何重新定義IMU高性能低成本
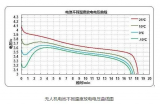
植保無人機電池性能測試方法
IMU加持:無人機&機器人再啟新章!
集性能與成本于一身的IMU,讓無人機飛行更穩定

從姿態到飛行控制,IMU全方位守護無人機飛行







 工商網監
工商網監
評論