 Modbus TCP 轉Canopen網關連接臺達伺服驅動器的配置案例
Modbus TCP 轉Canopen網關連接臺達伺服驅動器的配置案例
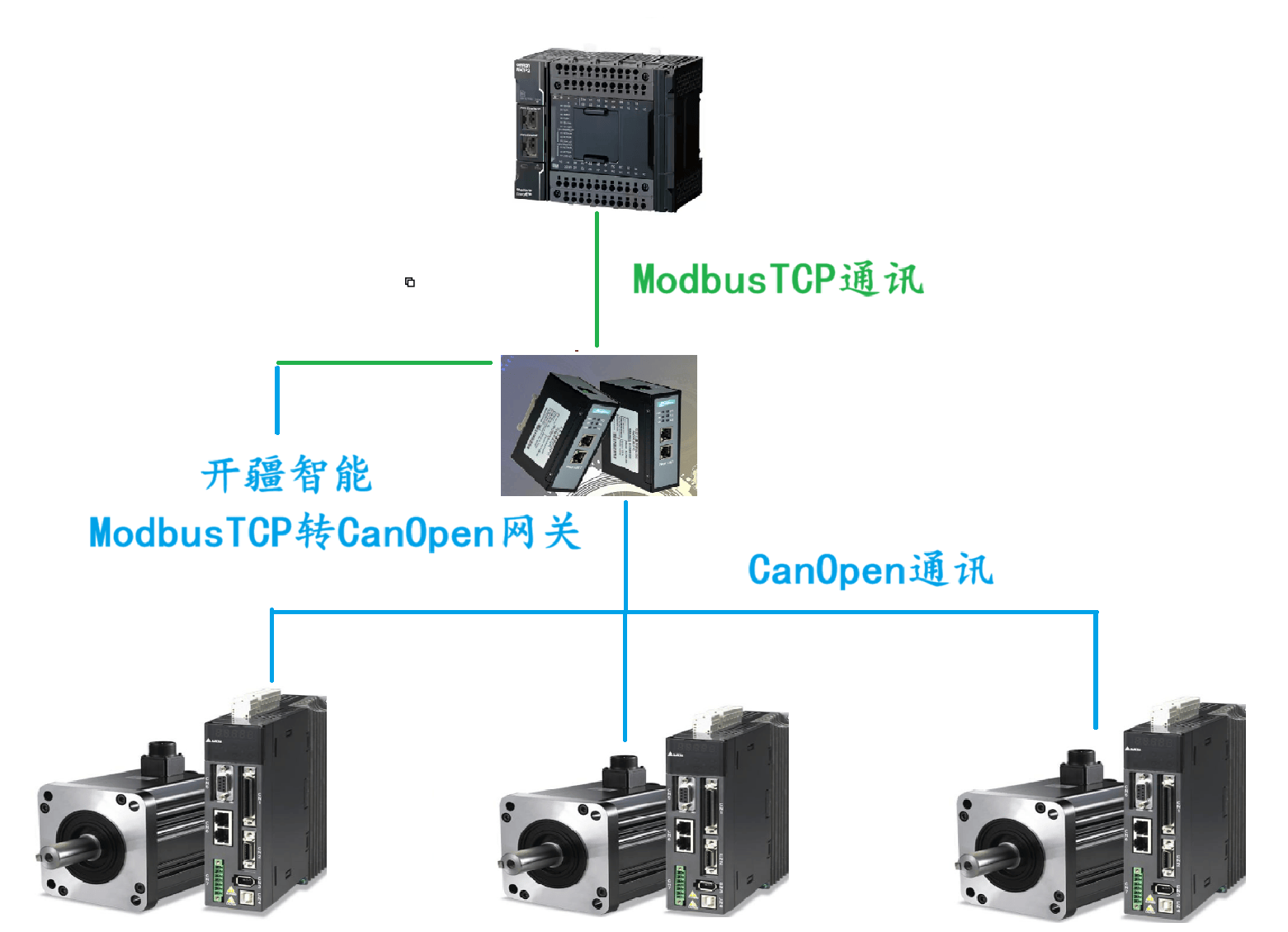
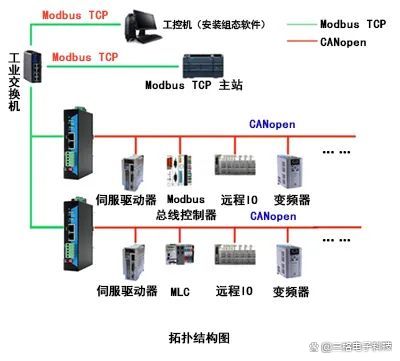
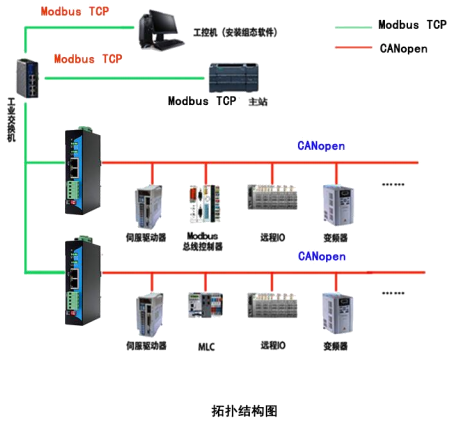
本案例是使用歐姆龍PLC通過開疆智能ModbusTCP轉Canopen網關連接臺達A2伺服驅動器的配置案例。
配置過程:
首先打開PLC組態軟件“Sysmac Studio”,新建項目并進行配置。
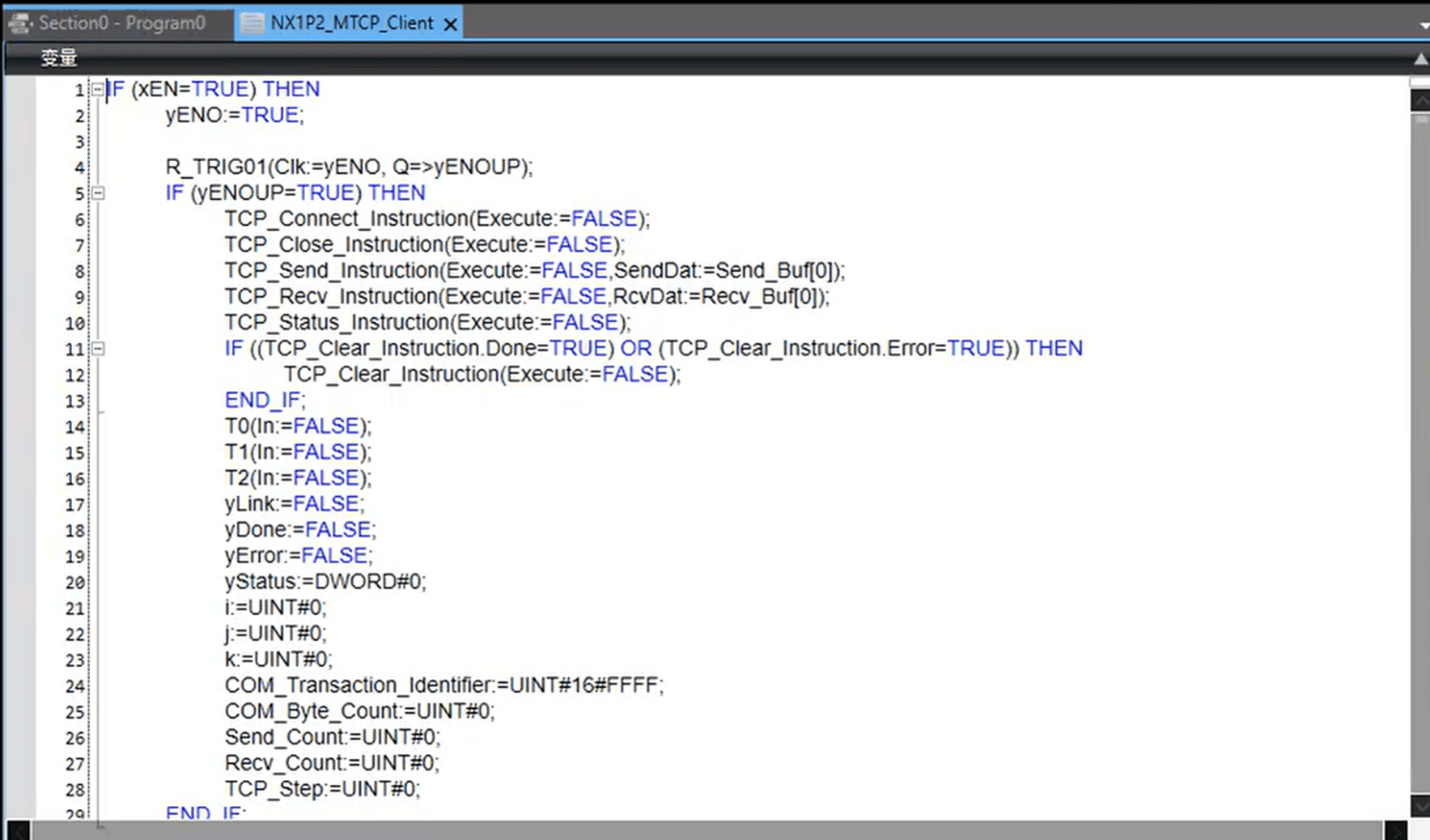
編寫ModbusTCP的通訊程序。
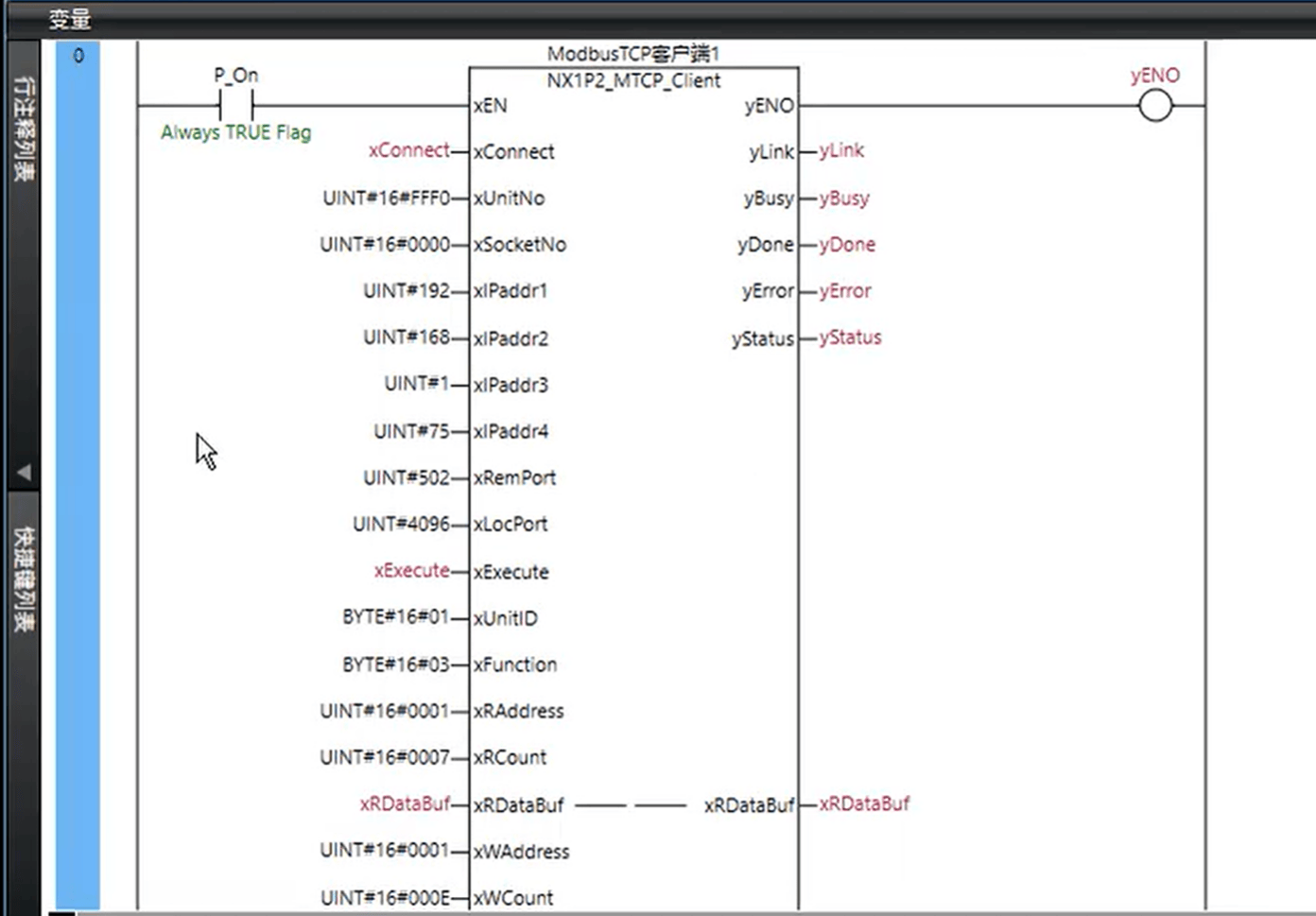
設置連接的IP地址,端口號等參數。
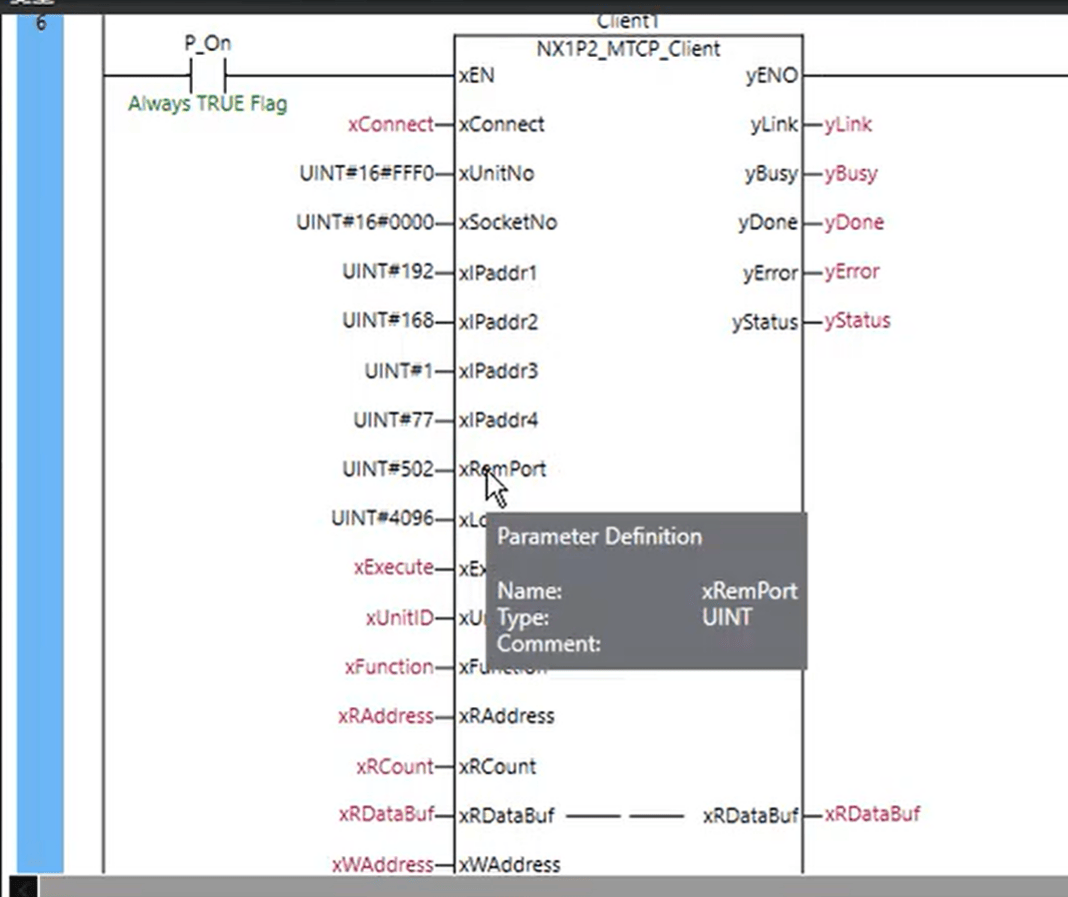
設置ModbusTCP的參數,(讀寫寄存器地址,數量等參數)
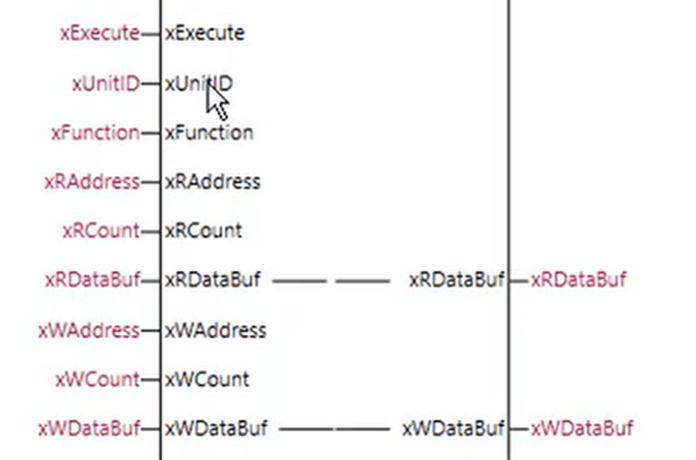
具體可對照ModbusTCP功能塊手冊
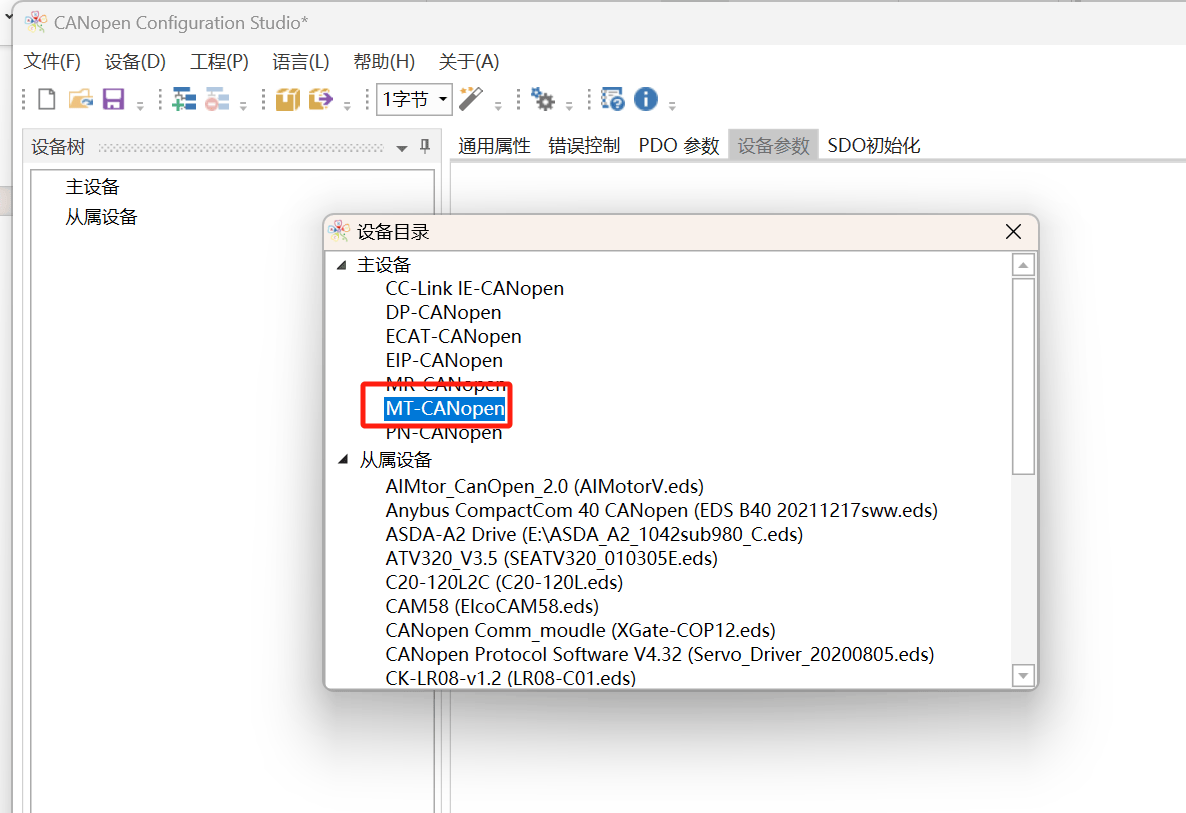
完成PLC一側ModbusTCP客戶端的配置后,打開網關配置軟件“CANopen Configuration Studio”
新建項目,設備選擇MT-Canopen
設置Canopen設備的波特率,周期時間等參數
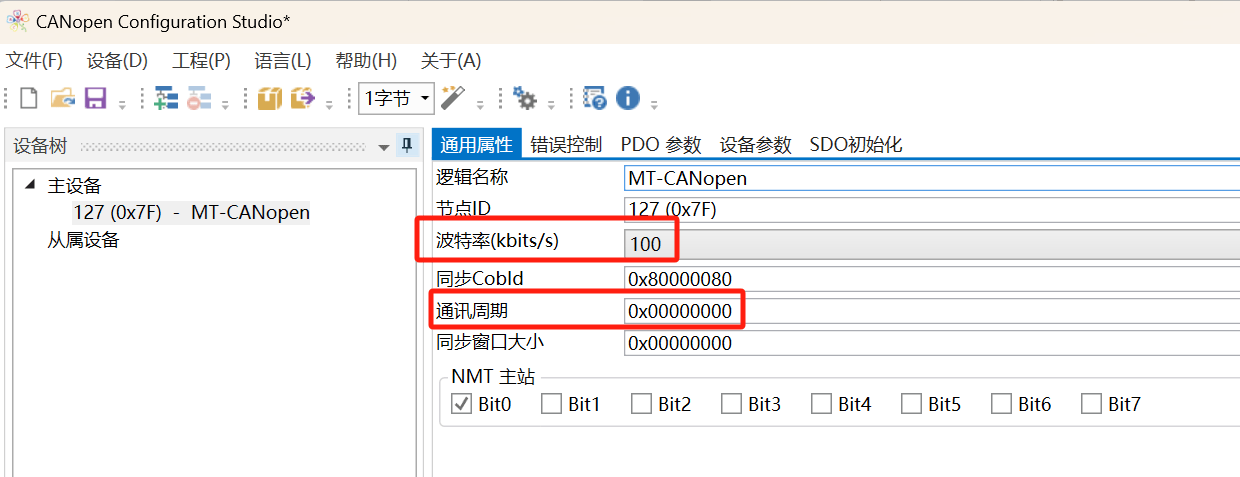
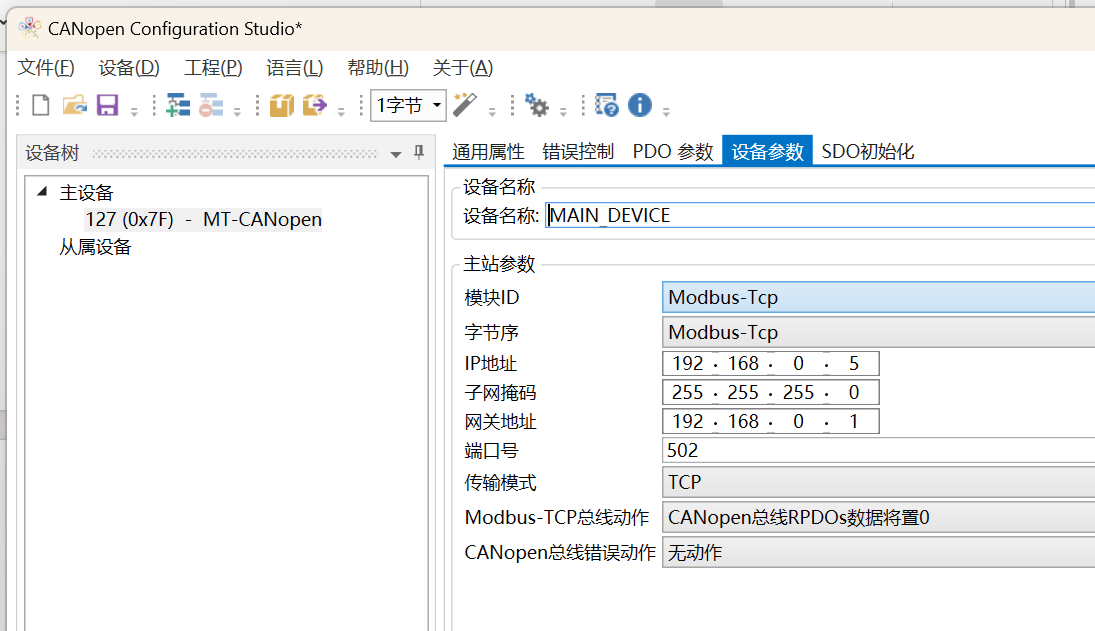
設置網關的ModbusTCP地址,以及掉線后的數據處理方式。
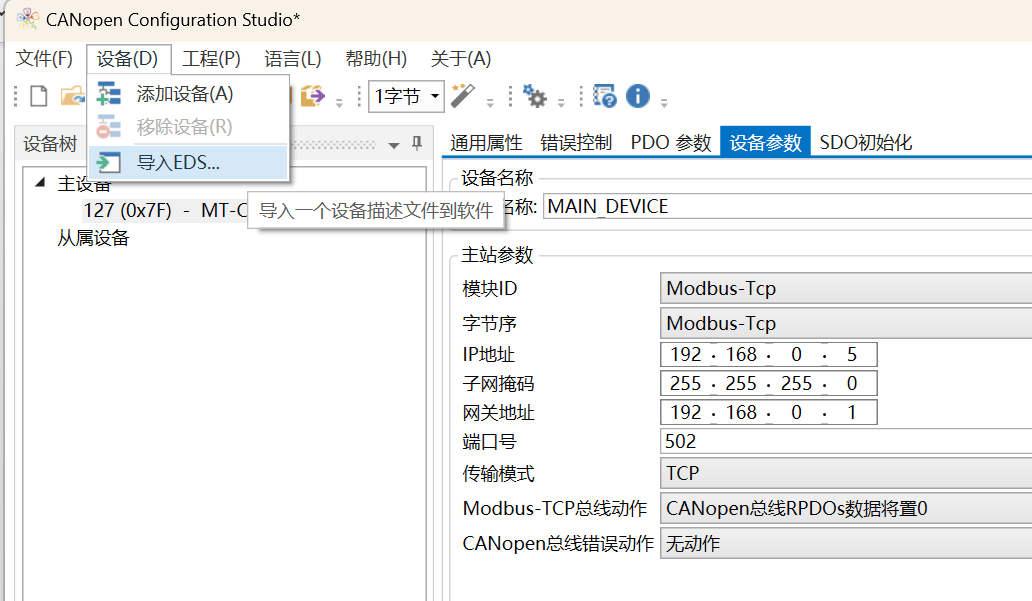
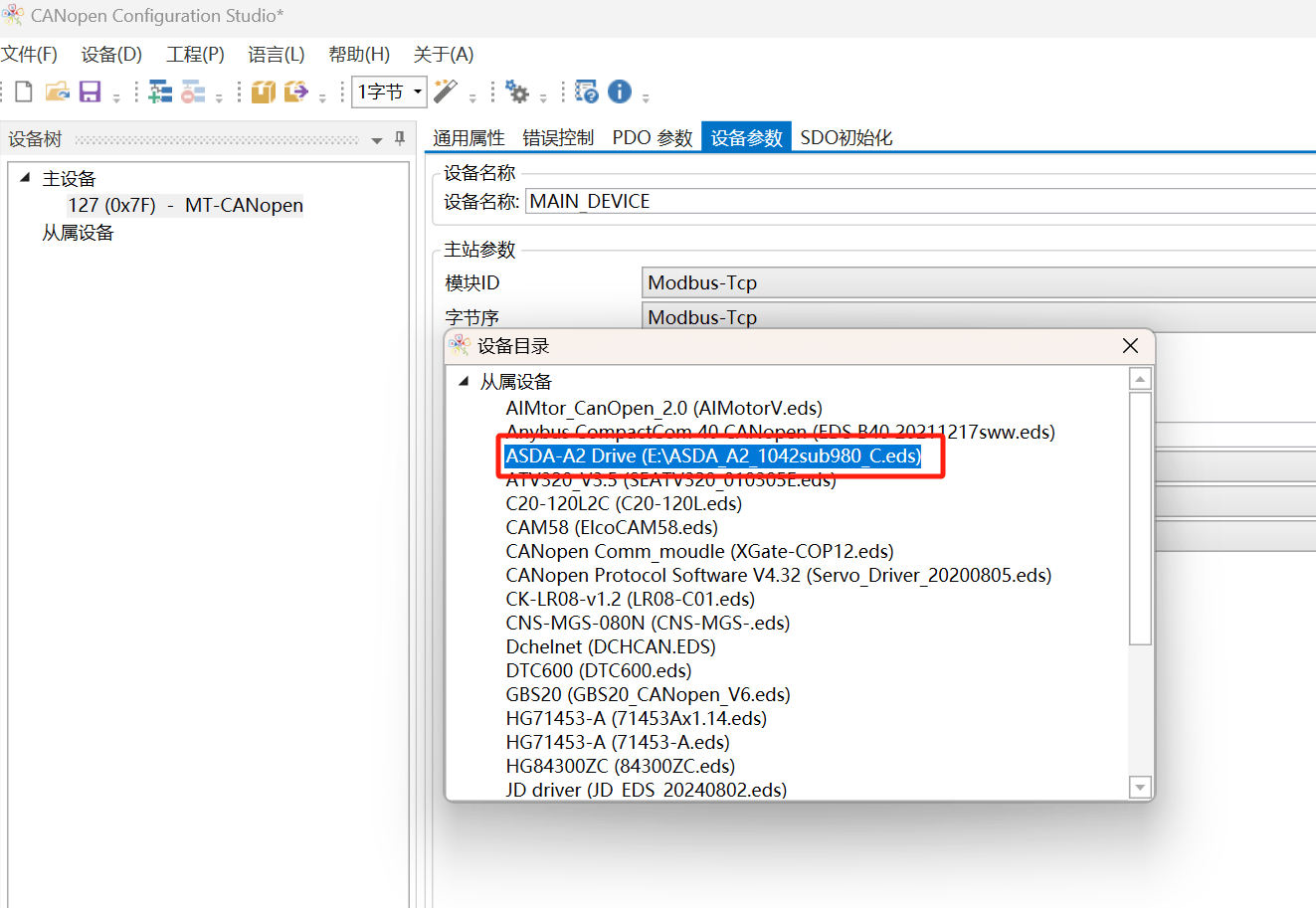
添加從站EDS文件
導入后添加從站設備
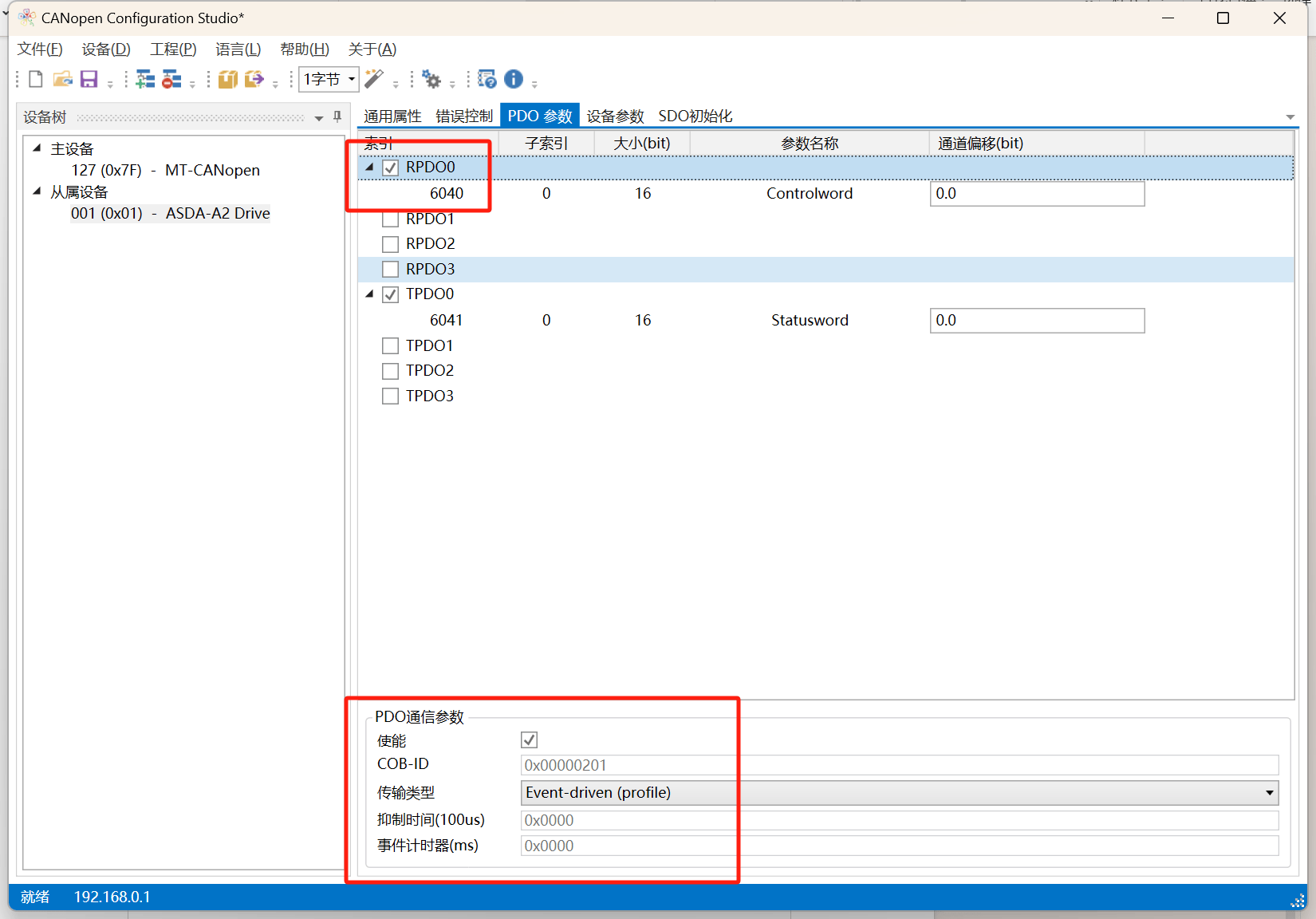
添加PDO參數并設置PDO參數如傳輸類型及傳輸方式等
確認無誤后將配置下載進網關,之后將全部設備重新上電,當網關指示燈正常后即代表設備正常通訊可進行讀寫。
審核編輯 黃宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
MODBUS
+關注
關注
28文章
2039瀏覽量
79003 -
網關
+關注
關注
9文章
5356瀏覽量
52505 -
CANopen
+關注
關注
8文章
360瀏覽量
44515
發布評論請先 登錄
相關推薦
熱點推薦
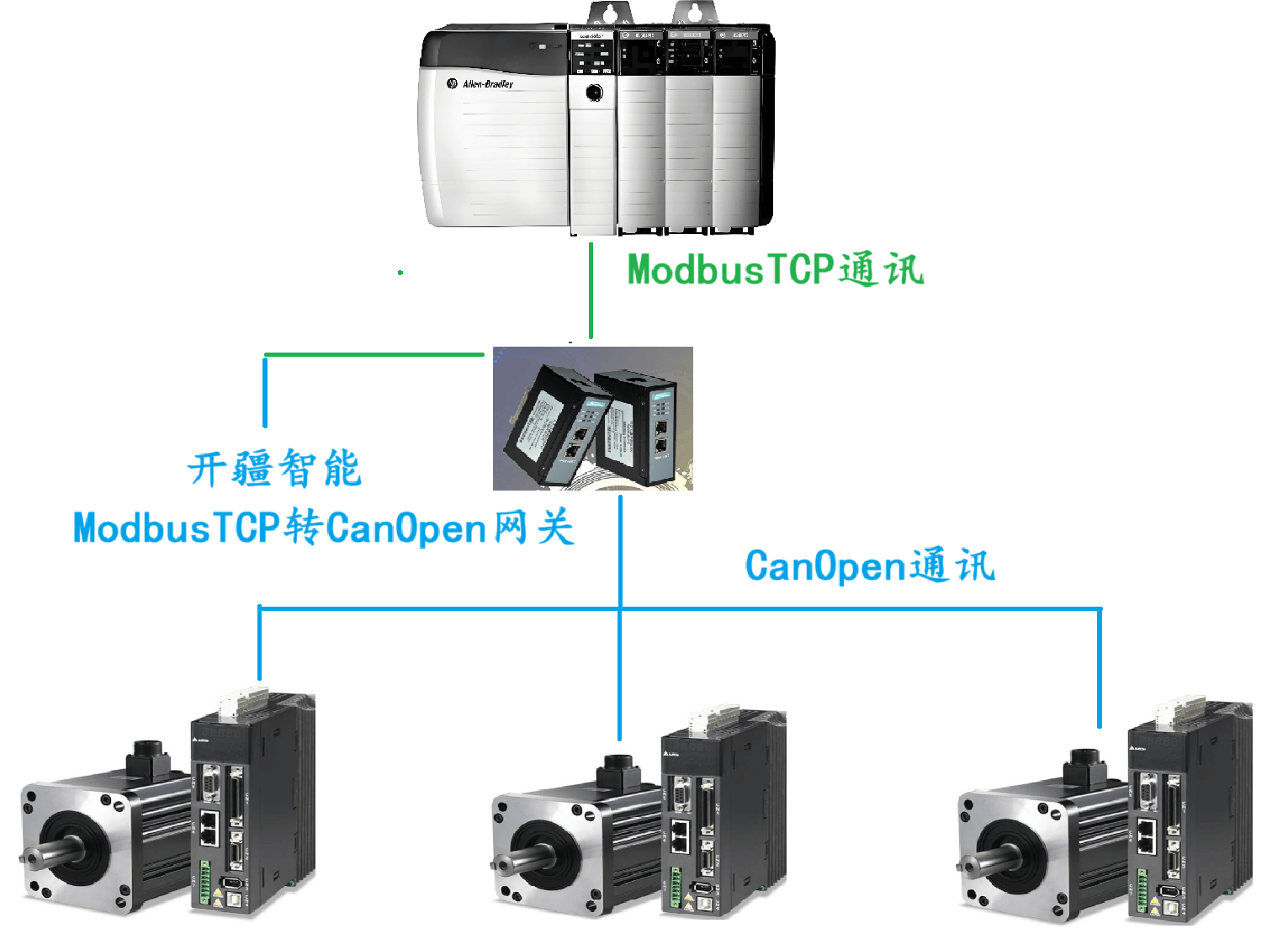
開疆智能ModbusTCP轉Canopen網關連接AB PLC與臺達伺服通訊案例
本案例是羅克韋爾PLC通過開疆智能ModbusTCP轉Canopen網關連接臺達A2伺服的
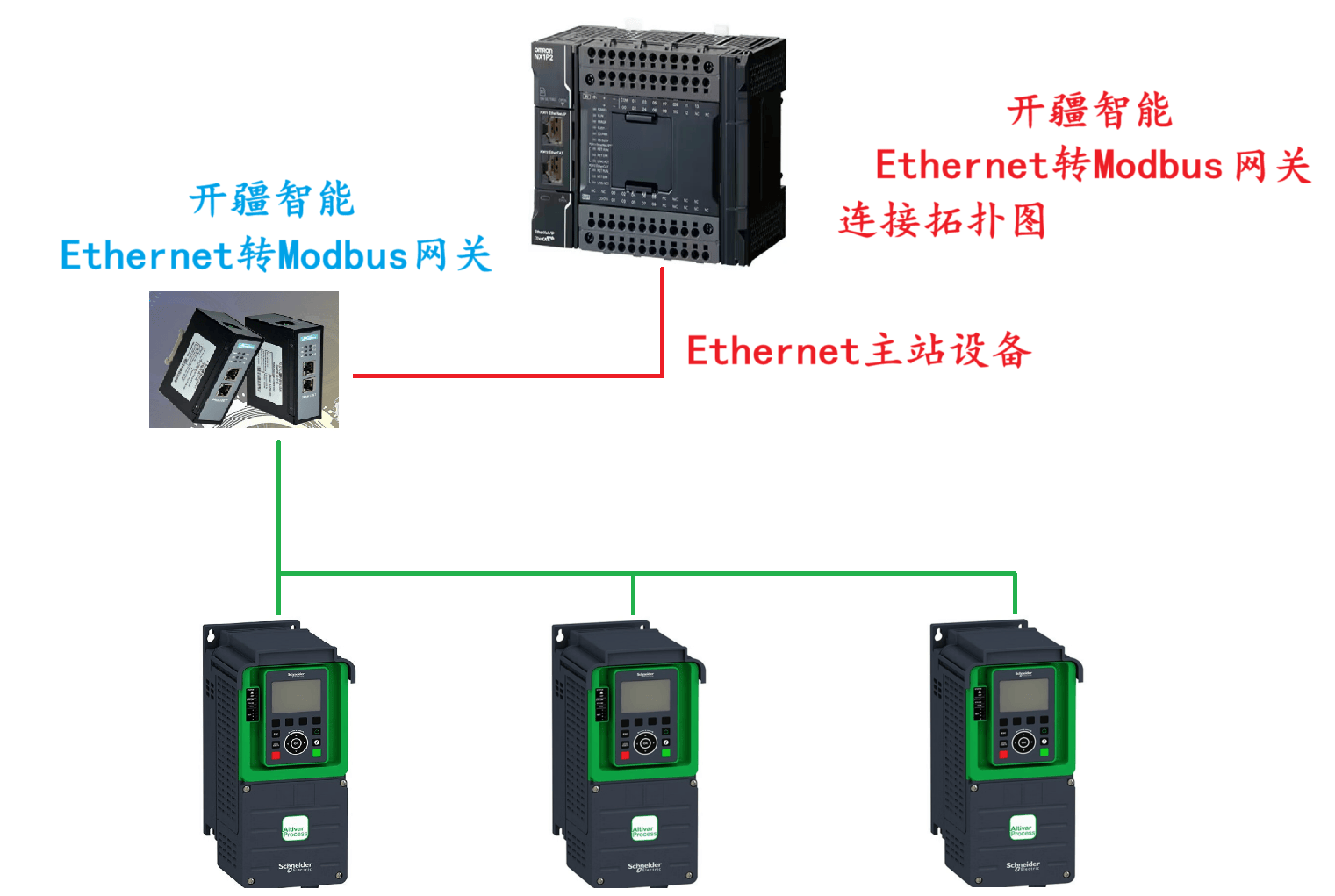
開疆智能Ethernet/IP轉Modbus網關連接變頻器配置案例
本案例是通過開疆智能Ethernet轉modbus網關連接變頻器的配置案例。 由于客戶現場改造PLC換成歐姆龍系列,所以使用開疆智能研發的E
協議大和解:ETHERCAT轉CANopen網關配置
與CANopen網絡之間的數據通訊,可連接CANopen網絡到EtherCAT網絡。即將CANopen設備連接到EtherCAT網絡。 應用


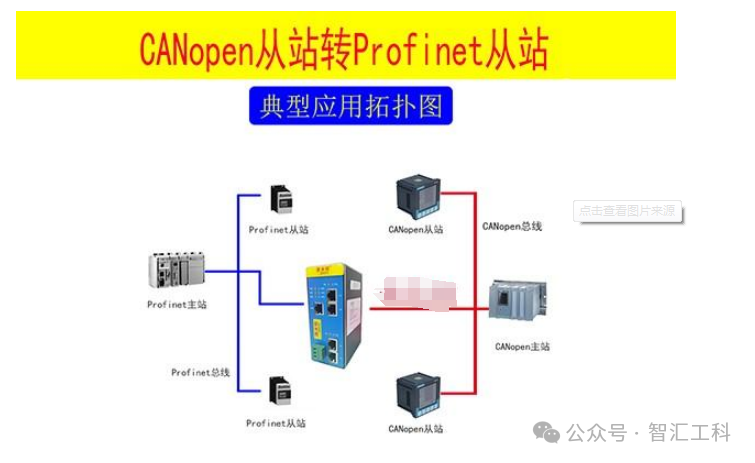
CANOpen轉PROFINET網關連接低壓伺服系統
CANOpen轉PROFINET網關連接低壓伺服系統是一個在工業自動化領域中常見的應用場景,以下是對該連接過程的詳細解析: 一、準備工作 1
Modbus TCP轉Modbus RTU網關連接組態王的5大技巧!
Modbus RTU網關(XD-ETH20)便成為了解決這一難題的關鍵工具。本文將詳細解析興達易控Modbus TCP

三格電子Modbus TCP轉CANOpen網關相關問答
轉換 ,使支持Modbus TCP的工業設備(如PLC、HMI)能夠與基于CANOpen協議的設備(如伺服驅動器、傳感

CANopen轉EtherCAT網關連接伺服驅動
,如何實現不同協議設備之間的無縫連接成為工程師們面臨的一個關鍵問題。本文將探討開疆智能CANopen轉EtherCAT網關KJ-ECAT-CANP的應用,以及其在

CANopen轉EtherCAT網關連接伺服驅動
,如何實現不同協議設備之間的無縫連接成為工程師們面臨的一個關鍵問題。本文將探討開疆智能CANopen轉EtherCAT網關KJ-ECAT-CANP的應用,以及其在

探索 CAN 轉 PN 網關連接 can 設備的精準配置之道
網關連接西門子?PLC 和雷賽伺服驅動器,實現對電機轉動的精細控制和定位,確保?AGV 運載車在運動控制上的精確度和

代際躍升丨Modbus轉Profinet網關與伺服的智能之旅
本案例詳細介紹了如何通過開疆智能Modbus轉Profinet網關KJ-PNG-201實現GSHD系列高性能伺服驅動器與西門子S7-1200
Modbus轉Profinet網關助力GSHD伺服驅動器與PLC完美連接配置詳解
本案例展示了通過開疆智能Modbus轉Profinet網關KJ-PNG-201連接GSHD系列高性能伺服

智能橋梁:Profinet轉CanOpen網關,臺達伺服無縫對接
在工業自動化領域,將西門子S7-1200系列PLC與具備CANOPEN通訊功能的伺服驅動器設備集成時,由于PLC默認采用PROFINET實時以太網通訊協議,直接連接存在協議不匹配問題。






 工商網監
工商網監
評論