") 基于自然坐標(biāo)系SVPWM理論分析
基于自然坐標(biāo)系SVPWM理論分析
400 Hz中頻電源作為軍用雷達(dá)、航電設(shè)備和部分裝甲車輛設(shè)備的基準(zhǔn)電源之一[1-2],其電能質(zhì)量水平關(guān)乎武器裝備性能,中頻電源的主要負(fù)載為電機(jī)類負(fù)載,大部分工況下處于不平衡的負(fù)載狀態(tài),而傳統(tǒng)中頻電源帶不平衡負(fù)載能力較弱,穩(wěn)定性和可靠性較差,因此研究中頻逆變電源有很重要的意義。
三相四橋臂逆變拓?fù)浼丛趥鹘y(tǒng)三相全橋逆變的基礎(chǔ)上增加了一個第四橋臂,將三相負(fù)載的中性點與第四橋臂的中點相連,通過第四橋臂來控制中性點電壓,使三相四橋臂逆變器可以產(chǎn)生三相獨立的電壓,使逆變器具有穩(wěn)定三相電壓對稱輸出的能力。這種逆變拓?fù)渚哂锌刂品椒`活、直流電壓利用率高和無需并聯(lián)大的直流電容的優(yōu)點,避免連接中點形成變壓器,大大減少逆變器的體積重量,減少對各類武器系統(tǒng)、裝甲車輛和航空平臺有限體積的占用,因此得到廣泛的重視和研究。
三相四橋臂逆變拓?fù)涞恼{(diào)制策略主要有脈寬調(diào)制[3]、滯環(huán)電流控制[4]、空間矢量脈寬調(diào)制(Space Vector Pulse-Width Modulation,SVPWM)[5]等策略。其中SVPWM具有易實現(xiàn)數(shù)字控制和直流母線電壓利用率高的優(yōu)點,因此多應(yīng)用于逆變器調(diào)制中。傳統(tǒng)的基于αβγ坐標(biāo)系的SVPWM策略[6-7],需要反復(fù)對三相電壓電流進(jìn)行坐標(biāo)變換,運(yùn)算過程復(fù)雜,且必須根據(jù)負(fù)載情況來確定參考電壓,當(dāng)負(fù)載突變或不明時,參考電壓的軌跡無法確定,導(dǎo)致實時控制困難。文獻(xiàn)[8]提出了一種基于abc自然坐標(biāo)系的三維空間矢量脈寬調(diào)制技術(shù),計算方法簡單,并且可拓展到多電平三相四橋臂逆變器中進(jìn)行運(yùn)用,但參考電壓的計算方法尚未給出。
本文基于自然坐標(biāo)系的SVPWM技術(shù),研究三相四橋臂逆變器的調(diào)制策略,通過建立分析四橋臂拓?fù)涞钠骄娏髂P停_定參考電壓,并根據(jù)“伏秒平衡”原則計算參考電壓的占空比。由于參考電壓是根據(jù)負(fù)載電流實時計算出的,因此逆變器在三相不平衡負(fù)載條件下可穩(wěn)定輸出三相對稱電壓,且總諧波畸變率較小,并通過仿真和實驗加以驗證。
1
基于自然坐標(biāo)系SVPWM理論分析
1.1 空間矢量及電壓矢量的合成與選擇
圖1為三相四橋臂逆變器主電路拓?fù)洹?/p>
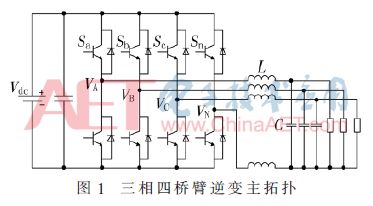
主拓?fù)溆兴膶虮郏繉虮蹖?yīng)兩種開關(guān)狀態(tài),共組成24=16種開關(guān)組合狀態(tài),將各橋臂的開關(guān)狀態(tài)用開關(guān)矢量Si表示:

上式中i=a,b,c,n,分別表示逆變器的A、B、C和N相。且需注意同一橋臂的上下兩個開關(guān)器件不能同時導(dǎo)通,否則會出現(xiàn)橋臂直通現(xiàn)象,破壞開關(guān)器件。根據(jù)開關(guān)狀態(tài)可得到電壓矢量:

結(jié)合式(1),可得到逆變器的16種開關(guān)組合狀態(tài)與空間電壓矢量的對應(yīng)關(guān)系,如表1所示。

表1的16種開關(guān)狀態(tài)對應(yīng)空間電壓矢量描繪到abc自然坐標(biāo)系中,可得如圖2空間電壓矢量圖。
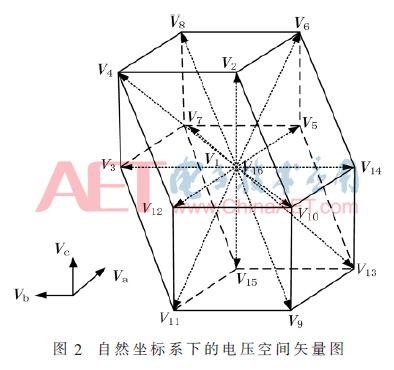
圖2可看作是一個封閉十二面體,可用平面Va=0、Vb=0、Vc=0和平面Va-Vb=0、Va-Vc=0、Vb-Vc=0將十二面體分割為二十四個空間四面體,每個四面體由兩個零電壓矢量(V1、V16)和三個非零電壓矢量構(gòu)成。只要確定了參考電壓矢量Vref落在哪個四面體中,即可用對應(yīng)的空間電壓矢量來合成。
為判斷參考電壓矢量落在某個四面體中,將該矢量與Va=0、Vb=0、Vc=0和Va-Vb=0、Va-Vc=0、Vb-Vc=0六個面進(jìn)行比較,通過判斷比較結(jié)果來確定合成參考電壓矢量的四面體。利用二進(jìn)制計數(shù)法,對六個比較結(jié)果進(jìn)行加權(quán)計算,用以標(biāo)記四面體,特做如下定義:
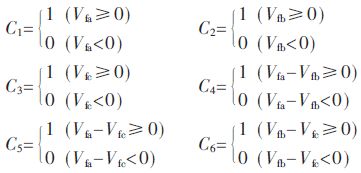
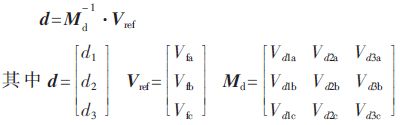
其中Vfa、Vfb、Vfc是參考電壓矢量Vref歸一化到abc自然坐標(biāo)系下的量,指針函數(shù)的表達(dá)式為:

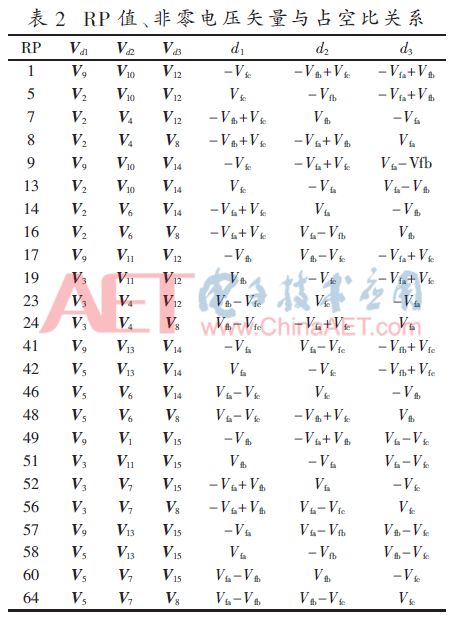
由式(2)計算得RP值見表2,其對應(yīng)二十四個四面體,RP值確定參考電壓矢量所在四面體,選擇該四面體的非零矢量和零矢量合成參考電壓矢量。
1.2 電壓矢量占空比的計算
參考電壓矢量由非零矢量和零矢量合成,開關(guān)電壓矢量的作用時間可根據(jù)“伏秒平衡”原則求得:
上式中Vd1、Vd2、Vd3為d1、d2、d3對應(yīng)的非零開關(guān)矢量,且下標(biāo)a、b、c分別表示開關(guān)矢量在abc坐標(biāo)軸的投影值。確定了RP的值,就可根據(jù)參考電壓得到合成的空間矢量和占空比,具體結(jié)果見表2。
由表2可知,通過計算RP值來確定空間四面體、開關(guān)電壓矢量和占空比的策略,相比于在αβγ坐標(biāo)系的占空比求取更簡單,易于數(shù)字化控制技術(shù)的實現(xiàn)。
1.3 參考電壓矢量的計算
建立abc坐標(biāo)系下三相四橋臂逆變器平均電流模型[9],如圖3所示,輸出電壓等效為受控電壓源。
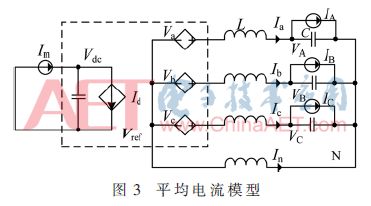
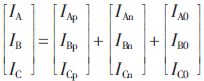
IA,IB,IC為等效成電流源的三相負(fù)載電流,可根據(jù)對稱分量法將其分解為正序Ip、負(fù)序In和零序I0分量,下角標(biāo)p,n,0分別表示正序、負(fù)序和零序。
且三相電壓、電流對稱輸出,VM表示輸出電壓的額定值,則三相電壓表達(dá)式為:
由于三相電壓等效圖相同,以A相進(jìn)行對稱分量分析。圖4為A相正序、負(fù)序、零序分量等效圖。
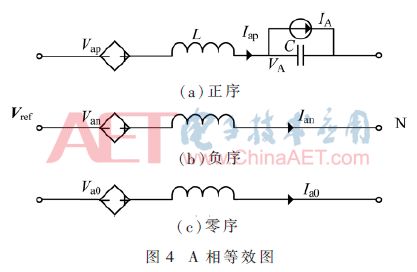
依據(jù)電路理論分析參考電壓矢量Vref的正序、負(fù)序和零序分量則可表示為:
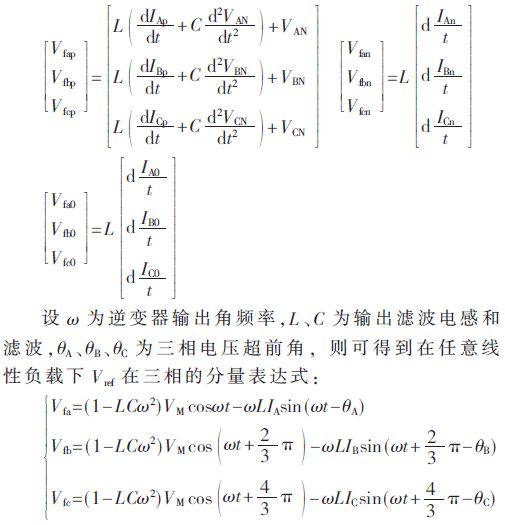
分析可知,只要檢測三相負(fù)載電流即可得到參考電壓,當(dāng)負(fù)載變化時DSP可根據(jù)負(fù)載電流的變化計算出每相參考電壓,從而控制三相電壓對稱輸出。
2
仿真分析
為驗證基于自然坐標(biāo)系的SVPWM策略的可行性和有效性,使用仿真軟件MATLAB/Simulink建立基于SVPWM策略的三相四橋臂逆變器仿真電路,具體仿真參數(shù)為:設(shè)計總輸出功率為6 kV·A,直流側(cè)輸入電壓300 V,功率器件開關(guān)頻率為20 kHz,輸出三相電壓有效值為115 V,頻率為400 Hz,輸出濾波電路濾波電感1 mH,濾波電容20 μF。
主要在以下負(fù)載情況對逆變器進(jìn)行仿真分析:(1)阻性不平衡負(fù)載;(2)阻感性和阻容性不平衡負(fù)載。
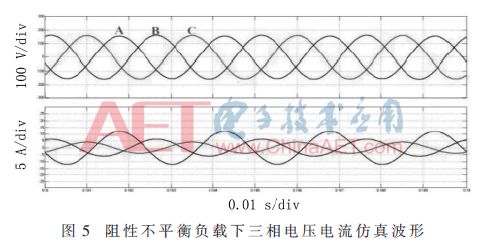
三相阻性不平衡負(fù)載分別為13 Ω、26 Ω和40 Ω,逆變器三相電壓和電流的仿真結(jié)果如圖5所示。
逆變器帶三相阻感性和阻容性不平衡負(fù)載,其中A相13 Ω和10 mH感性負(fù)載,B相純阻性負(fù)載13 Ω,C相13 Ω和10 μF容性負(fù)載,仿真結(jié)果如圖6所示。
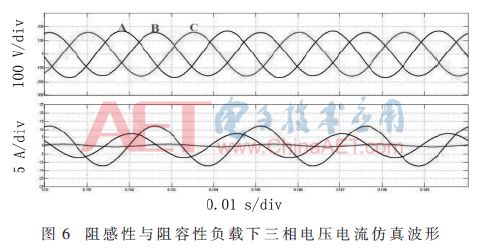
分析仿真結(jié)果可看出,基于自然坐標(biāo)系SVPWM策略的三相四橋臂逆變器在不平衡負(fù)載條件下,三相輸出電壓波形較為對稱,且經(jīng)過仿真系統(tǒng)FFT分析三相電壓波形的總諧波畸變率THD小于3%。
3
實驗結(jié)果
為驗證方案可行性,設(shè)計了一臺實驗樣機(jī),基于DSP(TMS320F28069)完成SVPWM策略對功率器件的矢量控制,其中實驗樣機(jī)的主要參數(shù)為:輸出總功率為6 kV·A,輸入直流母線電壓300 V,輸出電壓有效值和頻率為115 V/400 Hz,開關(guān)頻率為20 kHz,輸出濾波器的電感和電容值分別為1 mH和20 μF。主要測試了在不平衡負(fù)載下逆變器的輸出能力,記錄了不平衡負(fù)載下的三相電壓電流和中線電流波形。
圖7分別給出了三相不平衡阻感性和阻容性負(fù)載時,三相電壓和A相電流波形,可見逆變器輸出適應(yīng)性強(qiáng),在各種不平衡負(fù)載條件下均能使三相電壓對稱輸出。
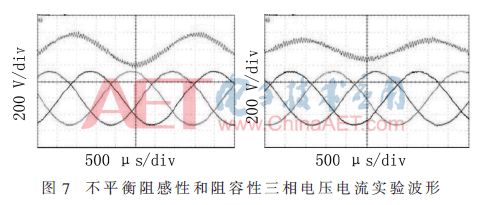
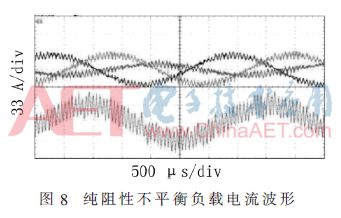
圖8為純阻性1/3不平衡負(fù)載下三相濾波和中線電感電流,由于電感影響電流存在較小脈動,中線電流脈動較為明顯,但電壓波形仍滿足THD<3%。
4
結(jié)論
基于abc自然坐標(biāo)系下的SVPWM策略的三相四橋臂中頻逆變器與αβγ坐標(biāo)系空間矢量調(diào)制相比,一方面省去了復(fù)雜的坐標(biāo)變換,另一方面在空間四面體的選擇和開關(guān)矢量占空比計算上也更簡單,易于實現(xiàn)數(shù)字化控制和DSP程序編寫。本文建立了三相四橋臂平均電流模型,分析并給出了空間參考電壓的計算方法,最后經(jīng)過仿真和實驗驗證了SVPWM策略的中頻逆變器具有在不平衡和非線性負(fù)載下三相穩(wěn)定對稱輸出的能力,具有一定的實用價值。
-
逆變器
+關(guān)注
關(guān)注
293文章
4857瀏覽量
210059 -
空間矢量
+關(guān)注
關(guān)注
1文章
24瀏覽量
11399 -
SVPWM
+關(guān)注
關(guān)注
14文章
615瀏覽量
91377
原文標(biāo)題:【學(xué)術(shù)論文】自然坐標(biāo)系SVPWM四橋臂中頻逆變器調(diào)制策略研究
文章出處:【微信號:ChinaAET,微信公眾號:電子技術(shù)應(yīng)用ChinaAET】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
坐標(biāo)系與魚雷運(yùn)動參數(shù)

非正交坐標(biāo)系下雙三相感應(yīng)電機(jī)SVPWM控制策略_李洪亮
機(jī)器人基坐標(biāo)系標(biāo)定方法研究
OPENGL坐標(biāo)系介紹 世界坐標(biāo)系和當(dāng)前繪圖坐標(biāo)系區(qū)別

帶你來剖析機(jī)器人的坐標(biāo)系吧!
自動駕駛各個坐標(biāo)系

三坐標(biāo)如何建立坐標(biāo)系?

世界坐標(biāo)系、相機(jī)坐標(biāo)系、圖像坐標(biāo)系、像素坐標(biāo)系之間的關(guān)系

深度剖析機(jī)器人的四大坐標(biāo)系

應(yīng)用衛(wèi)星通信領(lǐng)域的一個坐標(biāo)轉(zhuǎn)換過程—機(jī)體坐標(biāo)系與ENU坐標(biāo)系的轉(zhuǎn)換






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論