") 世界坐標(biāo)系、相機坐標(biāo)系、圖像坐標(biāo)系、像素坐標(biāo)系之間的關(guān)系
世界坐標(biāo)系、相機坐標(biāo)系、圖像坐標(biāo)系、像素坐標(biāo)系之間的關(guān)系

相機的成像過程涉及到四個坐標(biāo)系:世界坐標(biāo)系、相機坐標(biāo)系、圖像坐標(biāo)系、像素坐標(biāo)系。這篇博客介紹相機的成像過程,以及四個坐標(biāo)系之間的裝換關(guān)系。
相機理想成像模型:
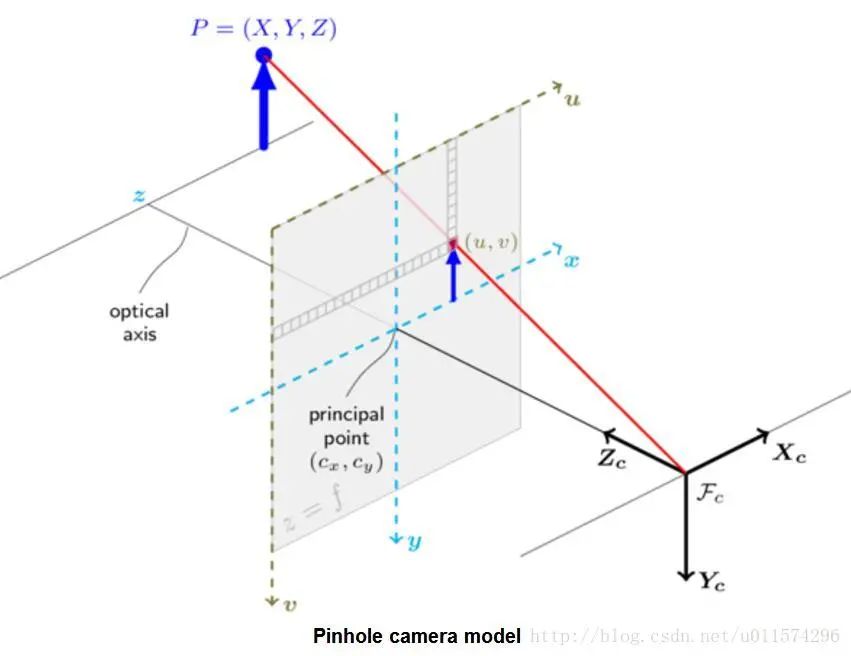
世界坐標(biāo)系:
客觀三維世界的絕對坐標(biāo)系,也稱客觀坐標(biāo)系。因為數(shù)碼相機安放在三維空間中,我們需要世界坐標(biāo)系這個基準(zhǔn)坐標(biāo)系來描述數(shù)碼相機的位置,并且用它來描述安放在此三維環(huán)境中的其它任何物體的位置,用(X, Y, Z)表示其坐標(biāo)值。
相機坐標(biāo)系(光心坐標(biāo)系):
以相機的光心為坐標(biāo)原點,X 軸和Y 軸分別平行于圖像坐標(biāo)系的 X 軸和Y 軸,相機的光軸為Z 軸,用(Xc, Yc, Zc)表示其坐標(biāo)值。
圖像坐標(biāo)系:
以CCD 圖像平面的中心為坐標(biāo)原點,X軸和Y 軸分別平行于圖像平面的兩條垂直邊,用( x , y )表示其坐標(biāo)值。圖像坐標(biāo)系是用物理單位(例如毫米)表示像素在圖像中的位置。
像素坐標(biāo)系:
以 CCD 圖像平面的左上角頂點為原點,X 軸和Y 軸分別平行于圖像坐標(biāo)系的 X 軸和Y 軸,用(u , v )表示其坐標(biāo)值。數(shù)碼相機采集的圖像首先是形成標(biāo)準(zhǔn)電信號的形式,然后再通過模數(shù)轉(zhuǎn)換變換為數(shù)字圖像。每幅圖像的存儲形式是M × N的數(shù)組,M 行 N 列的圖像中的每一個元素的數(shù)值代表的是圖像點的灰度。這樣的每個元素叫像素,像素坐標(biāo)系就是以像素為單位的圖像坐標(biāo)系。
已知一個現(xiàn)實世界中的物體點的在世界坐標(biāo)系中的坐標(biāo)為(X, Y, Z),經(jīng)過相機拍攝得到圖片,在圖片上的像素坐標(biāo)為(u , v )。假設(shè)在圖像坐標(biāo)系中的坐標(biāo)為( x , y ),在相機坐標(biāo)系中的坐標(biāo)為(Xc, Yc, Zc)。各個坐標(biāo)之間的轉(zhuǎn)化如下:
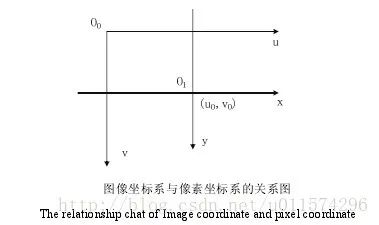
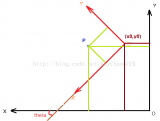
像素坐標(biāo)系與圖像坐標(biāo)系的關(guān)系
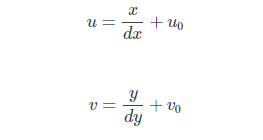
 ? 他們之間的轉(zhuǎn)換關(guān)系為:?
? 他們之間的轉(zhuǎn)換關(guān)系為:?
采用齊次坐標(biāo)再用矩陣形式將上式表示為:
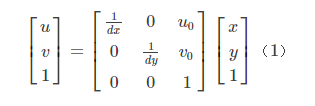
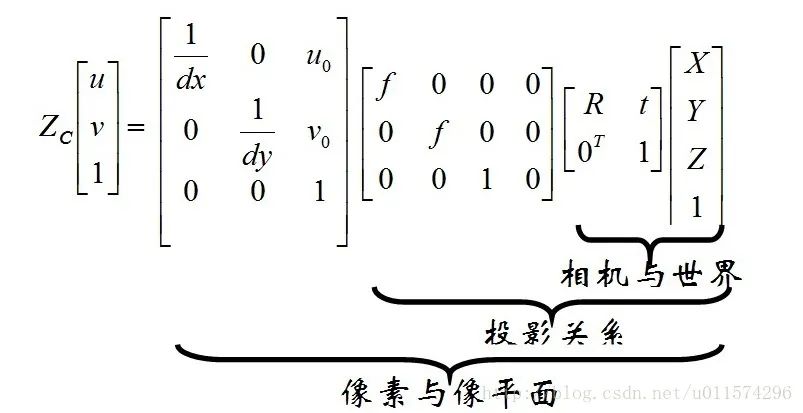
其中(u0, v0)是圖像坐標(biāo)系原點在像素坐標(biāo)系中的坐標(biāo),dx 和 dy分別是每個像素在圖像平面x和 y方向上的物理尺寸。
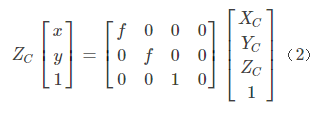
圖像坐標(biāo)系與相機坐標(biāo)系的關(guān)系

其中 f 為焦距(像平面與相機坐標(biāo)系原點的距離)。用齊次坐標(biāo)系和矩陣表示上述關(guān)系:
相機坐標(biāo)系與世界坐標(biāo)系的關(guān)系
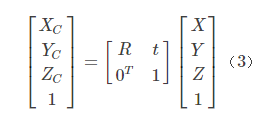
其中 R 為3 × 3正交旋轉(zhuǎn)矩陣,t 為三維平移向量。
像素坐標(biāo)系與世界坐標(biāo)系的關(guān)系
由式(1)(2)(3)可得:
審核編輯:湯梓紅
-
圖像
+關(guān)注
關(guān)注
2文章
1094瀏覽量
41262 -
像素
+關(guān)注
關(guān)注
1文章
205瀏覽量
18914 -
相機
+關(guān)注
關(guān)注
4文章
1468瀏覽量
54694 -
坐標(biāo)系
+關(guān)注
關(guān)注
0文章
29瀏覽量
7491
原文標(biāo)題:【立體視覺】世界坐標(biāo)系、相機坐標(biāo)系、圖像坐標(biāo)系、像素坐標(biāo)系之間的關(guān)系
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
CAD制圖軟件新手攻略:坐標(biāo)系及標(biāo)注坐標(biāo)
解決電壓方程在靜止坐標(biāo)系與運動坐標(biāo)系轉(zhuǎn)換問題
介紹坐標(biāo)系和機器人之間的紐帶即連桿坐標(biāo)系
坐標(biāo)系與魚雷運動參數(shù)

OPENGL坐標(biāo)系介紹 世界坐標(biāo)系和當(dāng)前繪圖坐標(biāo)系區(qū)別

關(guān)于工業(yè)機器人的四類坐標(biāo)系概述
帶你來剖析機器人的坐標(biāo)系吧!
相機標(biāo)定之四個坐標(biāo)系之間的變換關(guān)系
自動駕駛各個坐標(biāo)系

三坐標(biāo)如何建立坐標(biāo)系?

工業(yè)現(xiàn)場相機坐標(biāo)系和機械手坐標(biāo)系的標(biāo)定
深度剖析機器人的四大坐標(biāo)系

機器人中都有哪些坐標(biāo)系

應(yīng)用衛(wèi)星通信領(lǐng)域的一個坐標(biāo)轉(zhuǎn)換過程—機體坐標(biāo)系與ENU坐標(biāo)系的轉(zhuǎn)換






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論