 Profinet轉CAN以網關模塊構建工業機器人與西門子PLC穩定通信橋梁
Profinet轉CAN以網關模塊構建工業機器人與西門子PLC穩定通信橋梁
Profinet轉CAN網關模塊實現工業機器人通過CAN總線與西門子PLC通信

一、項目背景(Profinet轉CAN)
在現代工業自動化領域,工業機器人與控制系統之間的通信至關重要。西門子PLC作為主流的控制系統,支持Profinet協議;而工業機器人的伺服驅動器等設備通常采用CAN總線通信。因此,實現Profinet轉CAN的通信成為連接兩者的關鍵。捷米特JM-PN-CAN網關作為一種高效的解決方案,能夠實現中控系統(如西門子PLC)與伺服驅動器(支持CAN協議)之間的通訊,確保工業機器人的精確控制和實時響應。
二、系統組成
1.西門子PLC:支持Profinet協議,作為中控系統。
2.工業機器人伺服驅動器:支持CAN協議。
3.捷米特JM-PN-CAN網關:實現Profinet轉CAN的功能,連接西門子PLC和伺服驅動器。
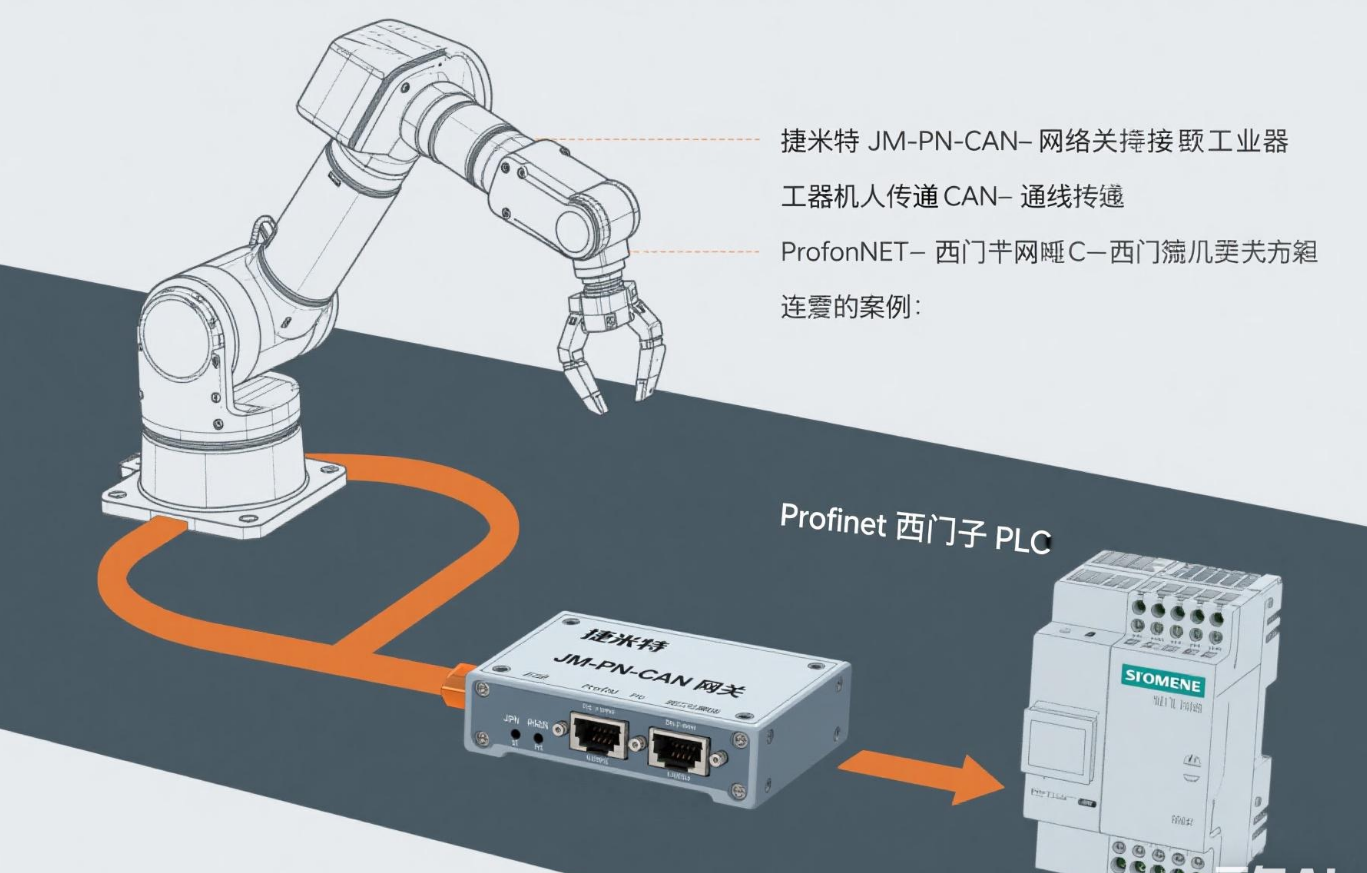
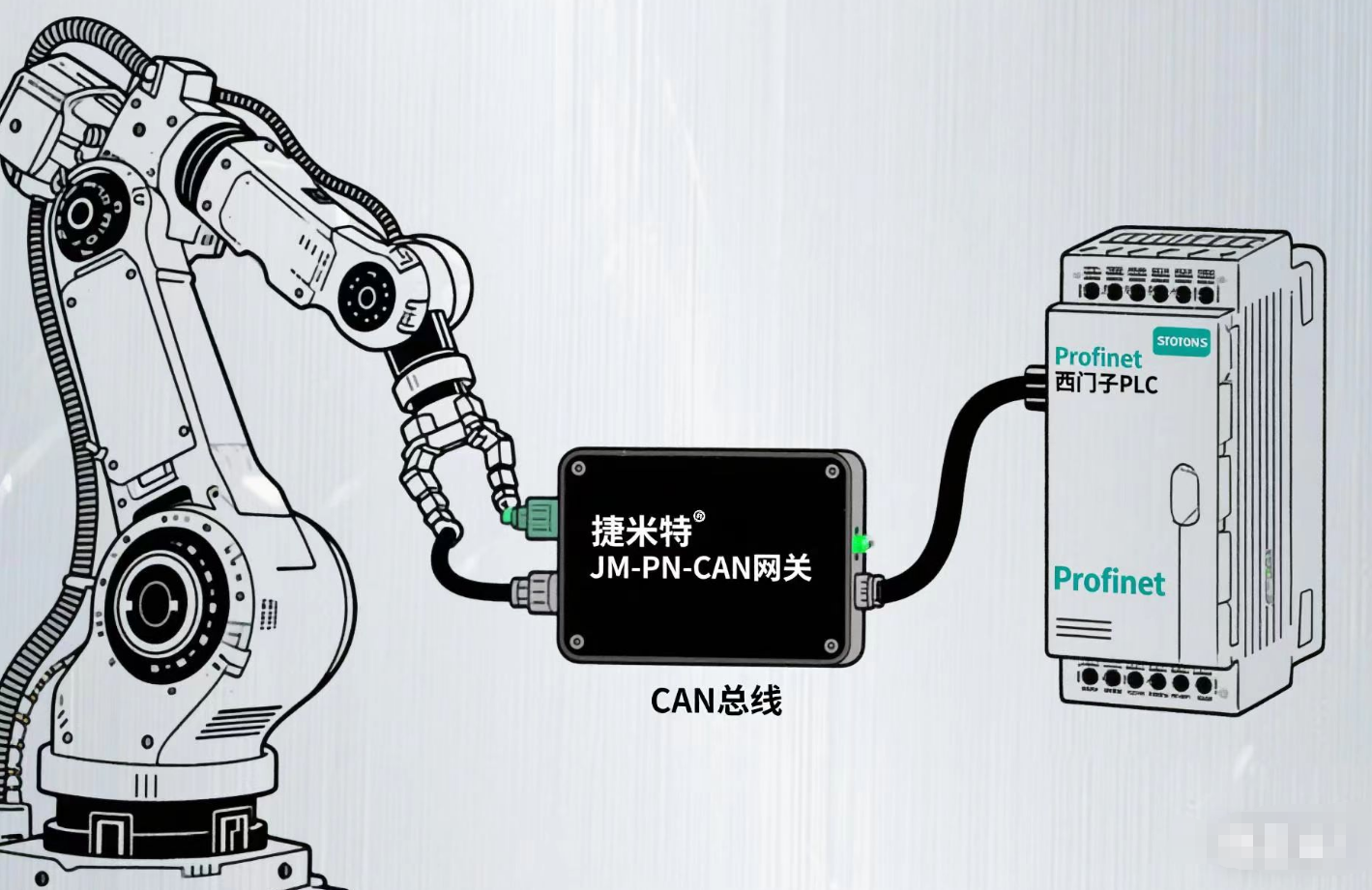
設備連接流程圖:
西門子PLC(Profinet)--->捷米特JM-PN-CAN網關(Profinet轉CAN)--->工業機器人伺服驅動器(CAN)
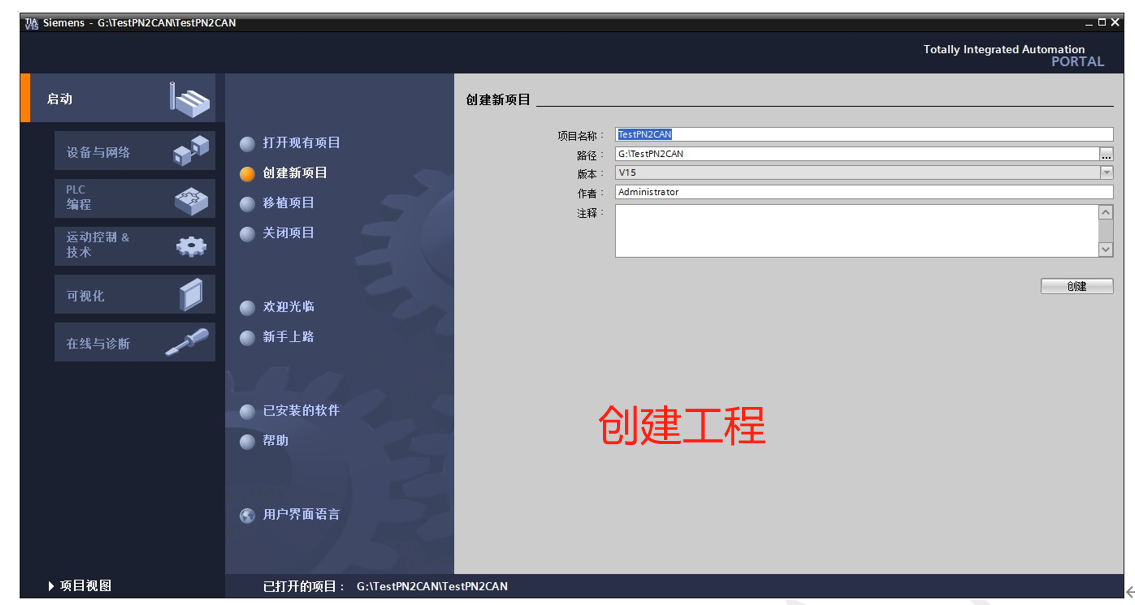
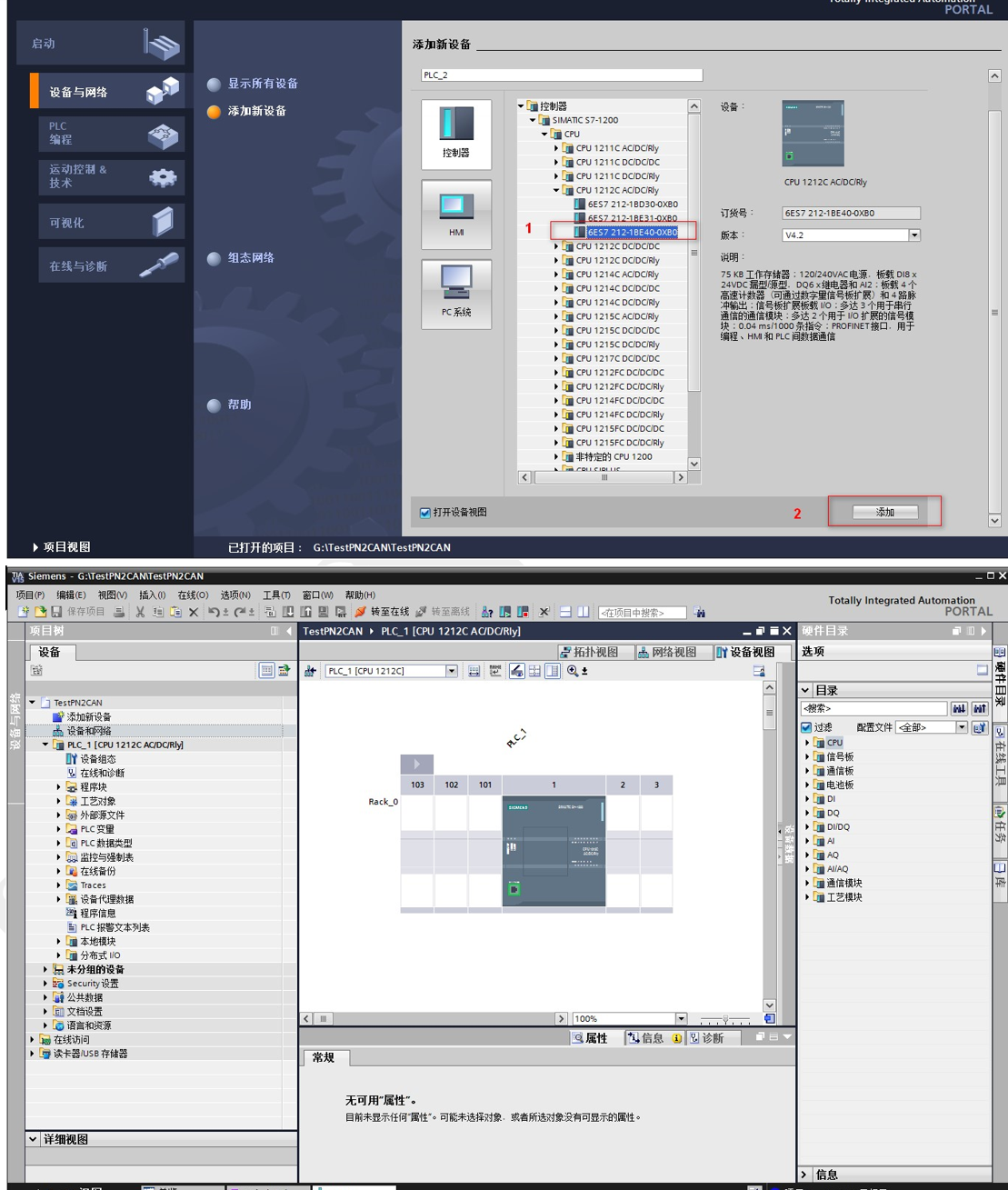
參數設置步驟 4.2.1 創建工程 打開 TIA Portal,選擇創建新項目,輸入項目名稱,選擇路徑等信息后,點擊創建,如下圖所示。 通過 Portal 視圖或創建完成的項目視圖將 CPU 插入到項目中。 在視圖中,選擇“設備和網絡”并單擊“添加新設備”(或者在項目視圖中的項目名稱下,雙擊“添加新設備”),如下圖“添加新設備”對話框,添加支持PROFINET接口的控制器,例如6ES7 212-1BE40-
三、設備連接流程
1.將捷米特JM-PN-CAN網關連接到西門子PLC的Profinet總線中作為從站使用。
2.將網關的另一端連接到工業機器人伺服驅動器的CAN總線中。
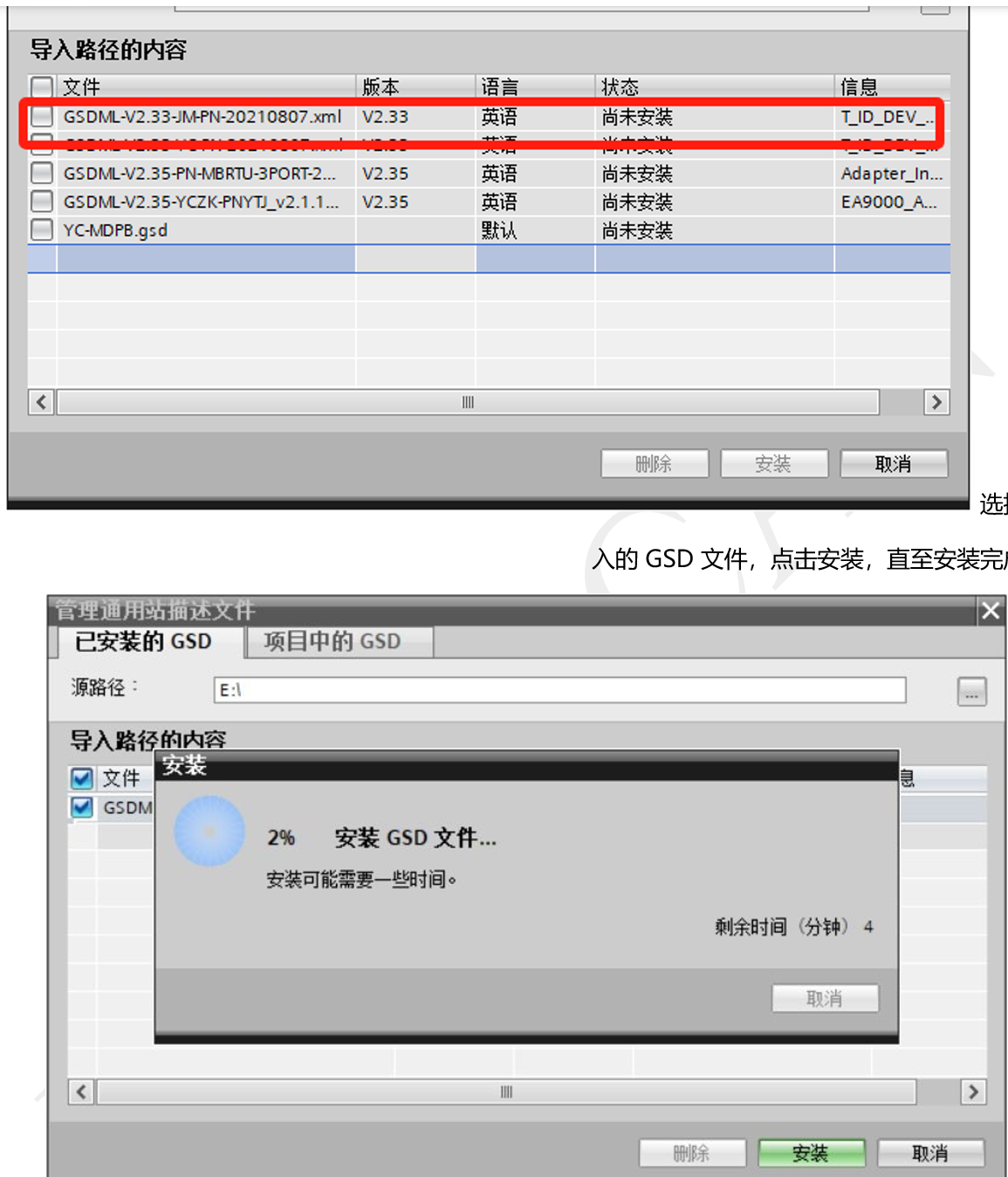
3.在西門子PLC的博途軟件中創建新項目,并安裝捷米特JM-PN-CAN網關的GSD文件。
4.在博途軟件中添加網關,并設置網關的IP地址、設備名稱等參數。
5.設置CAN通訊波特率,并添加CAN發送報文和接收報文。
6.通過Profinet轉CAN網關,實現西門子PLC與工業機器人伺服驅動器之間的高效、穩定通信。
四、通信流程
1.西門子PLC通過Profinet協議發送控制指令給捷米特JM-PN-CAN網關。
2.網關將Profinet協議轉換為CAN協議,并發送給工業機器人伺服驅動器。
3.伺服驅動器接收到CAN協議指令后,執行相應的動作控制工業機器人。
4.伺服驅動器將狀態信息通過CAN協議發送回捷米特JM-PN-CAN網關。
5.網關將CAN協議轉換為Profinet協議,并反饋給西門子PLC。
五、優勢分析
1.捷米特JM-PN-CAN網關能夠輕松將各種CAN設備接入到PROFINET網絡中,實現設備間的高效、穩定通信。
2.該產品還支持根據節點號進行讀寫操作,操作更加簡單方便。
3.通過Profinet轉CAN網關的轉換功能,還可以將老舊設備輕松地與現代設備進行集成,實現更高效、更靈活的自動化控制。
六、總結
通過使用捷米特JM-PN-CAN網關實現Profinet轉CAN的通信,可以確保工業機器人與西門子PLC之間的精確控制和實時響應。該方案不僅提高了生產效率,還降低了維護成本,具有很高的實用價值。
Profinet轉CAN通訊難題,找米工!
審核編輯 黃宇
-
plc
+關注
關注
5031文章
13739瀏覽量
472258 -
CAN
+關注
關注
57文章
2892瀏覽量
466776 -
Profinet
+關注
關注
6文章
1567瀏覽量
24954
發布評論請先 登錄
跨協議探秘:profinet轉ethernet ip網關搞定川崎機器人與PLC通信

當機器人遇上“語言障礙”:CCLINKIE轉Profinet的“破冰外掛”來啦\\!
ProfiNet轉CAN邊緣計算網關配置指南:西門子PLC與CAN總線電磁閥組網

通信新思路:EtherCAT轉Profinet網關在自主研發機器人中的技術實踐與優化

CCLKIE轉Profinet借協議轉換網關模塊打通三菱與西門子PLC鏈路

Modbus TCP 轉 Profinet 網關模塊開啟西門子伺服與上位機協議轉換連接
ABB機器人與西門子PLC通訊案例
Profinet轉Profinet網關應用在霍尼韋爾DCS與西門子1500PLC通訊案例

基于 EtherCAT 轉 ProfiNet 網關達成西門子 1200 PLC 與伺服電機通訊連接的應用實例
代際躍升丨Modbus轉Profinet網關與伺服的智能之旅
EtherCAT轉Profinet:輕松連接西門子PLC與凱福驅動器!

EtherCAT轉Profinet:輕松連接西門子PLC與凱福驅動器!
EtherNetIP轉Profinet網關連接發那科機器人配置實例解析






 工商網監
工商網監
評論