 通過vmRT-Thread和ROS2賦能機器人智能開發
通過vmRT-Thread和ROS2賦能機器人智能開發
隨著機器人技術的快速迭代升級,協作機器人、復合移動機器人和人形機器人等新興應用場景對實時控制與智能決策的深度融合提出了迫切需求。然而,當前機器人操作系統架構面臨以下關鍵挑戰:
算力瓶頸制約智能化發展:傳統控制系統算力不足,難以有效支撐語音識別、手勢交互、動態避障、力控優化、地圖構建、位姿計算等智能化需求。
系統集成復雜度高:傳統方案采用多主機分布式架構,導致系統體積龐大、調試維護困難、維護部署復雜。
整體成本高昂:傳統機器人系統通常需要多個子系統間交互協同,例如傳感器系統、驅動系統、控制系統等,導致系統成本增加。
本文提出基于vmRT-Thread嵌入式虛擬化集成開發平臺的解決方案。該平臺通過虛擬化技術支持在高性能嵌入式設備上同時運行硬實時操作系統和富功能操作系統,其架構如下圖所示:
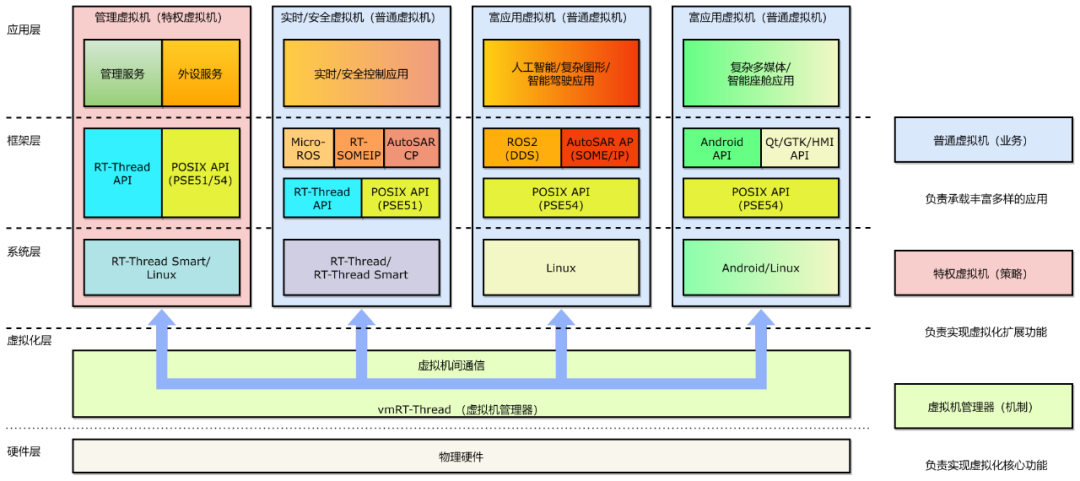
平臺采用一體化架構設計,支持在單塊SOC上同時部署實時虛擬機與搭載了ROS2框架的普通虛擬機,實現在單塊SOC上集成感知、決策、控制全流程功能。在通信機制上,平臺提供虛擬機間共享內核和套接字通信能力,保障虛擬機間高效通信。
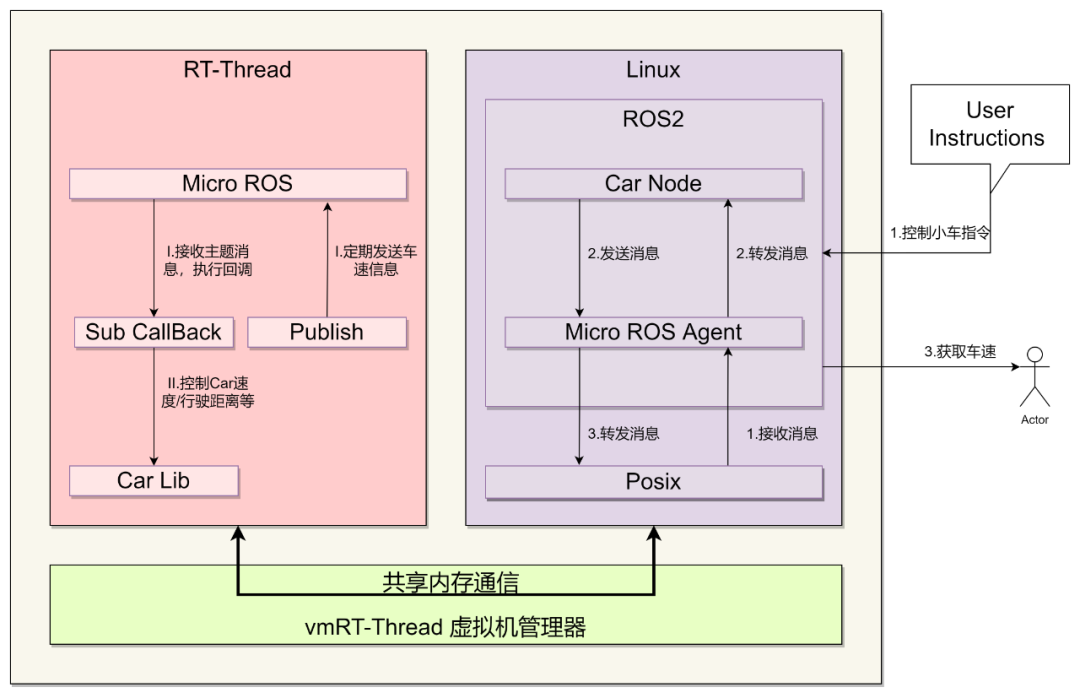
基于上述方式,采用8核開發板來部署機器人小車,通過ROS2命令完成對小車的控制,系統架構如下:
具體分為以下幾個階段執行:
1. 虛擬化系統部署
在開發板上部署vmRT-Thread;
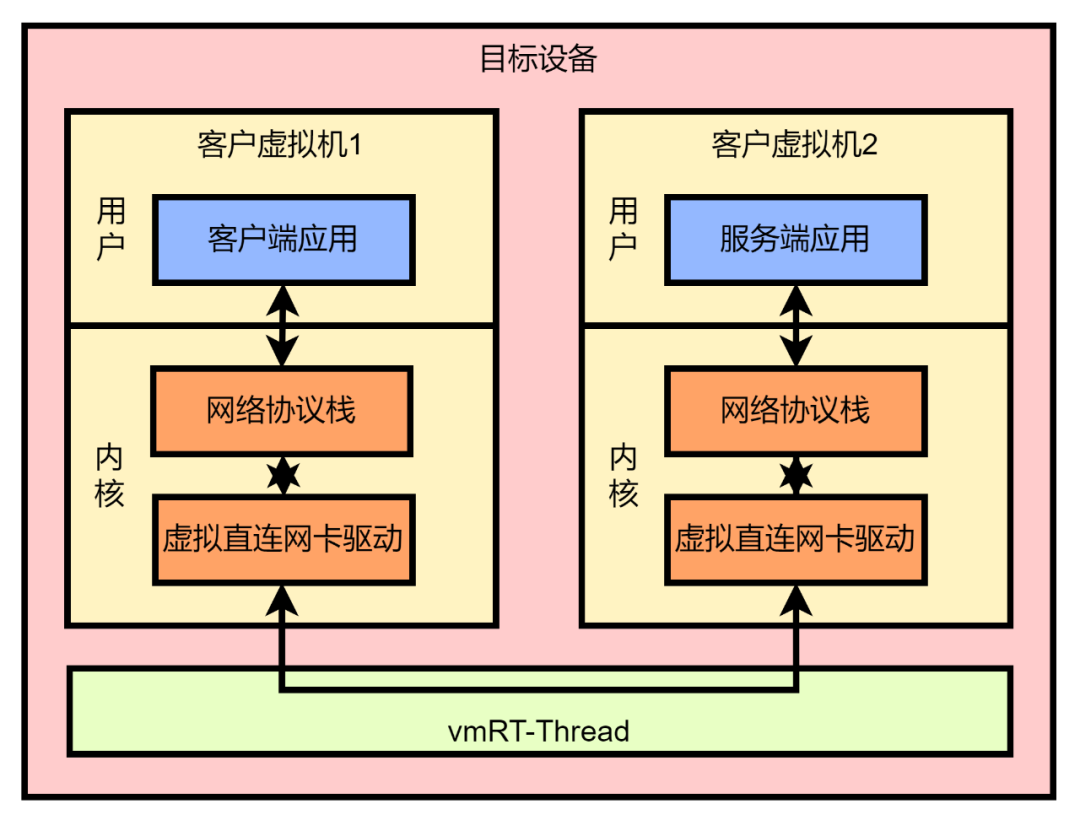
創建兩個Guest系統,為每個系統分配物理資源(CPU、內存和外設),運行Ubuntu與RT-Thread。配置基于共享內存的直連網卡通信,示例如下圖所示:
2.Ubuntu
準備ROS2環境;
安裝Micro ROS Agent;
創建發布者和訂閱者;
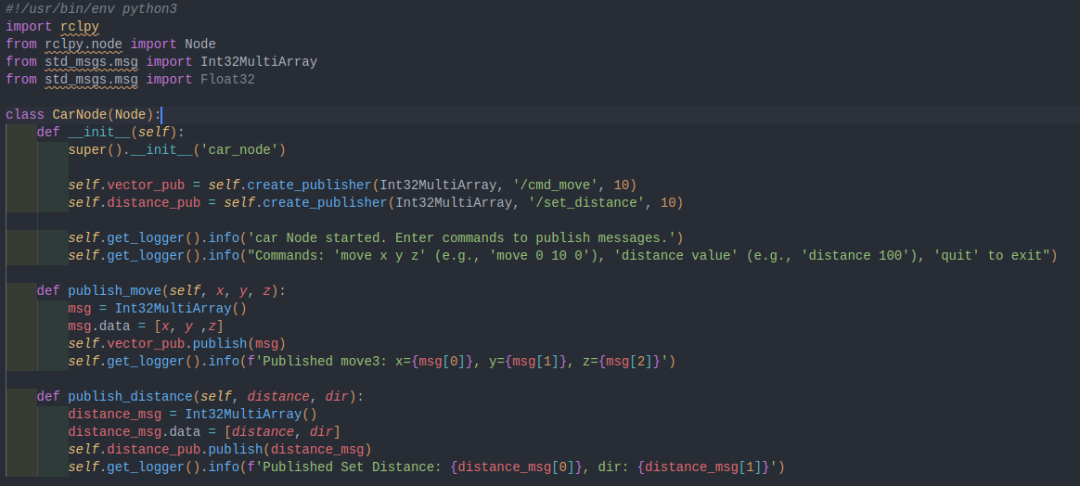
發布者:提供設置車移動和移動固定距離主題
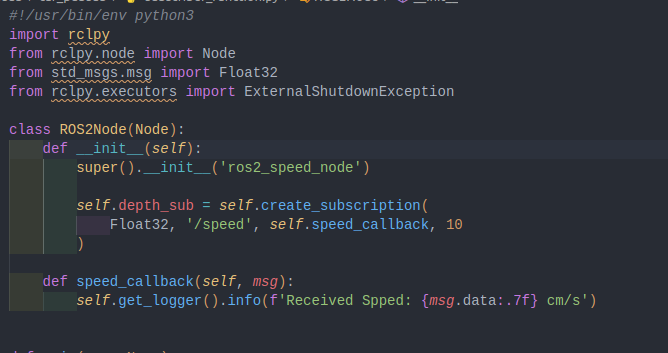
訂閱者:訂閱獲取車速的主題
3.RT-Thread
搭建Micro ROS;
實現對電機、傳感器的實時控制;
提供小車前進、后退、左轉和右轉接口;
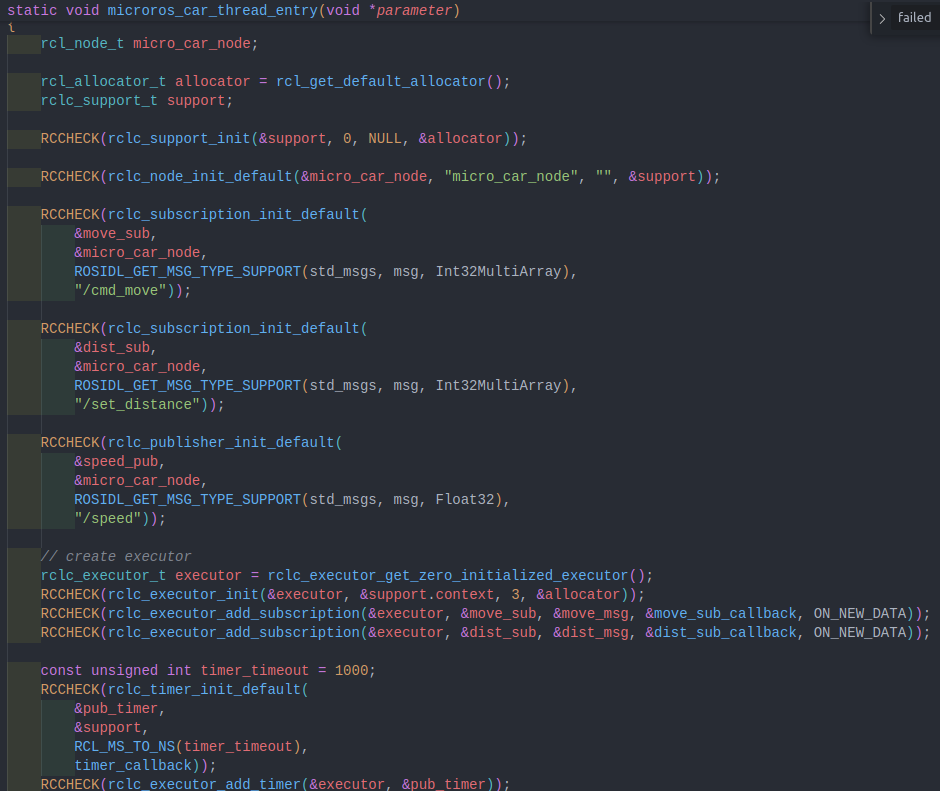
創建發布者與訂閱者
訂閱者回調函數:
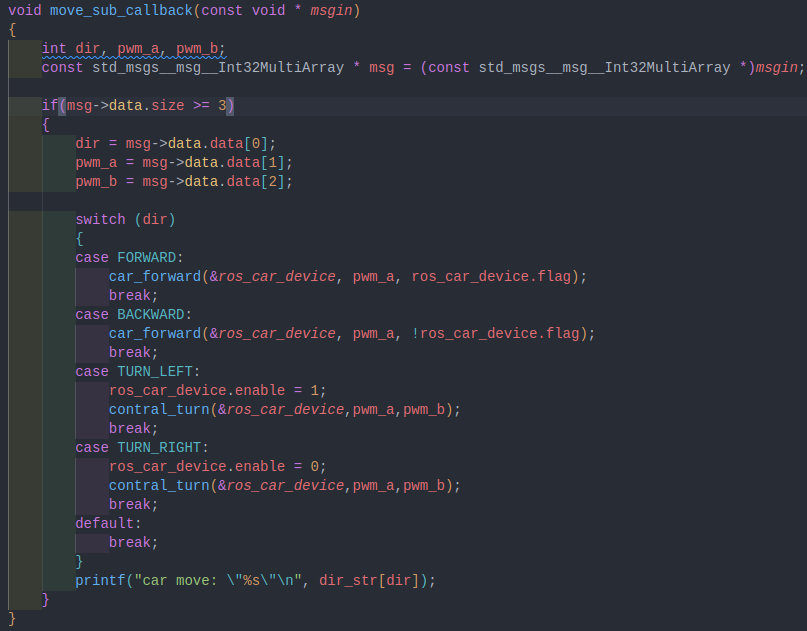
訂閱移動主題
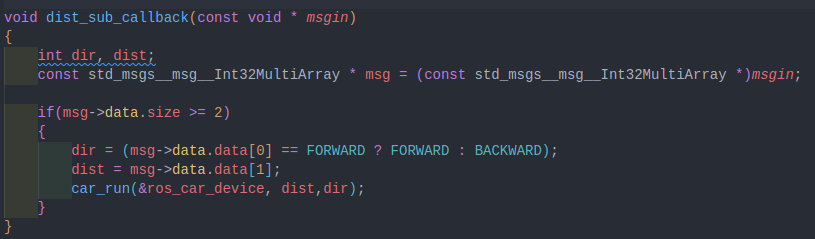
訂閱指定距離主題
發布者回調函數:
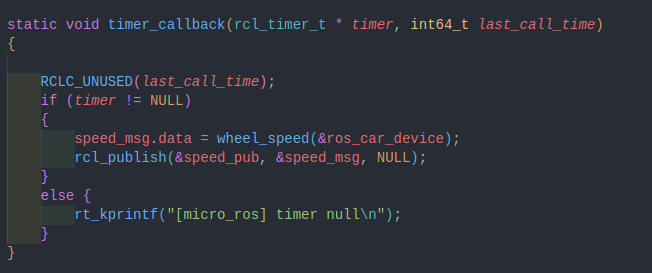
采用定時器進行周期性發送車速數據,定時間隔
1s
4.系統聯調與驗證
通過Ubuntu上ROS2環境中發送主題消息,驗證整體通信通路。
通過ROS2發布主題消息控制小車移動:

Ubuntu啟動Micro ros Agent,采用udp方式通信
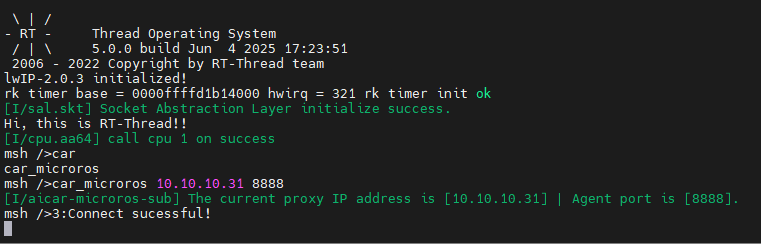
RT-Thread運行Micro ROS
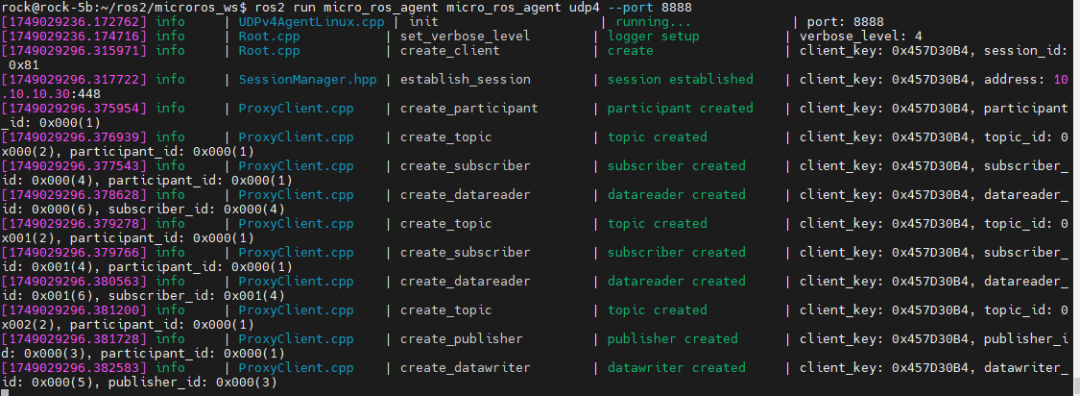
連接成功后Micro ros Agent會顯示創建的信息

Ubuntu:運行獲取車速

Ubuntu:通過移動主題控制小車前進,pwm設置為10%

RT-Thread:響應
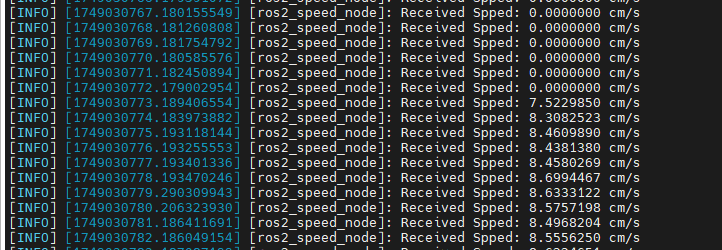
Ubuntu
:運行獲取當前車速

Ubuntu
:通過移動主題控制小車前進,pwm設置為50%
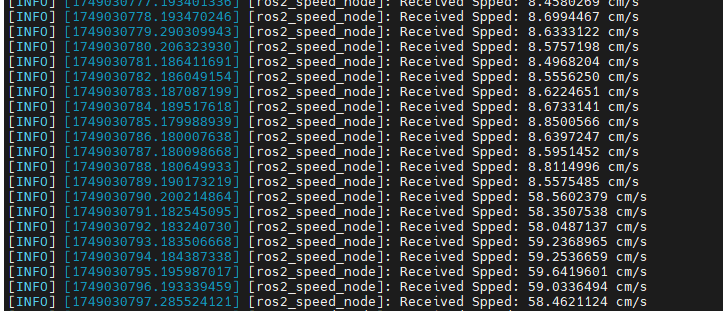
Ubuntu
:運行獲取當前車速

Ubuntu:通過設定距離主題控制小車移動特定距離

RT-Thread:響應
本文創新性地提出并實現了基于 vmRT-Thread 的虛擬化融合方案。該方案通過將ROS2與實時控制深度集成于單一芯片平臺,不僅有效解決了系統體積、部署調試難度等實際問題,更成功賦能機器人同時執行高精度實時控制與復雜智能決策的核心功能。
這一技術路徑的成功探索,為“驅控一體”等下一代高性能機器人產品的研發奠定了堅實的技術基礎,有力推動了機器人系統向更高效、更智能、更集約的方向邁進。
-
機器人
+關注
關注
213文章
29508瀏覽量
211624 -
VM
+關注
關注
0文章
17瀏覽量
17778 -
RT-Thread
+關注
關注
32文章
1371瀏覽量
41530 -
ROS
+關注
關注
1文章
285瀏覽量
17566
發布評論請先 登錄





 工商網監
工商網監
評論