") NVIDIA推出開源物理引擎Newton
NVIDIA推出開源物理引擎Newton
物理 AI 模型使機器人能夠自主感知、解釋、推理現(xiàn)實世界并與之交互。加速計算和仿真是開發(fā)新一代機器人的關(guān)鍵。
物理學在機器人仿真中發(fā)揮著至關(guān)重要的作用,為在真實環(huán)境中準確虛擬呈現(xiàn)機器人行為和交互奠定了基礎(chǔ)。借助這些仿真器,研究人員和工程師可以安全、加速且經(jīng)濟高效地訓練、開發(fā)、測試和驗證機器人控制算法和原型設(shè)計。
機器人仿真建立在基本的物理定律之上,包括質(zhì)量和動量守恒、剛體和軟體動力學、接觸和摩擦以及執(zhí)行器建模。這些原則用于預(yù)測機器人在各種場景和環(huán)境中的行為方式,例如在使用 GPU、DPU 或其他硬件加速器時的響應(yīng)。
然而,仿真往往無法完全匹配現(xiàn)實,這一問題被稱為“仿真與現(xiàn)實(sim-to-real)的差距”。機器人開發(fā)者需要一個統(tǒng)一、可擴展且可定制的解決方案,既能模擬現(xiàn)實世界的物理特性,又能處理復(fù)雜行為(包括與自定義求解器的交互),并支持高可靠性等功能。
關(guān)于 Newton
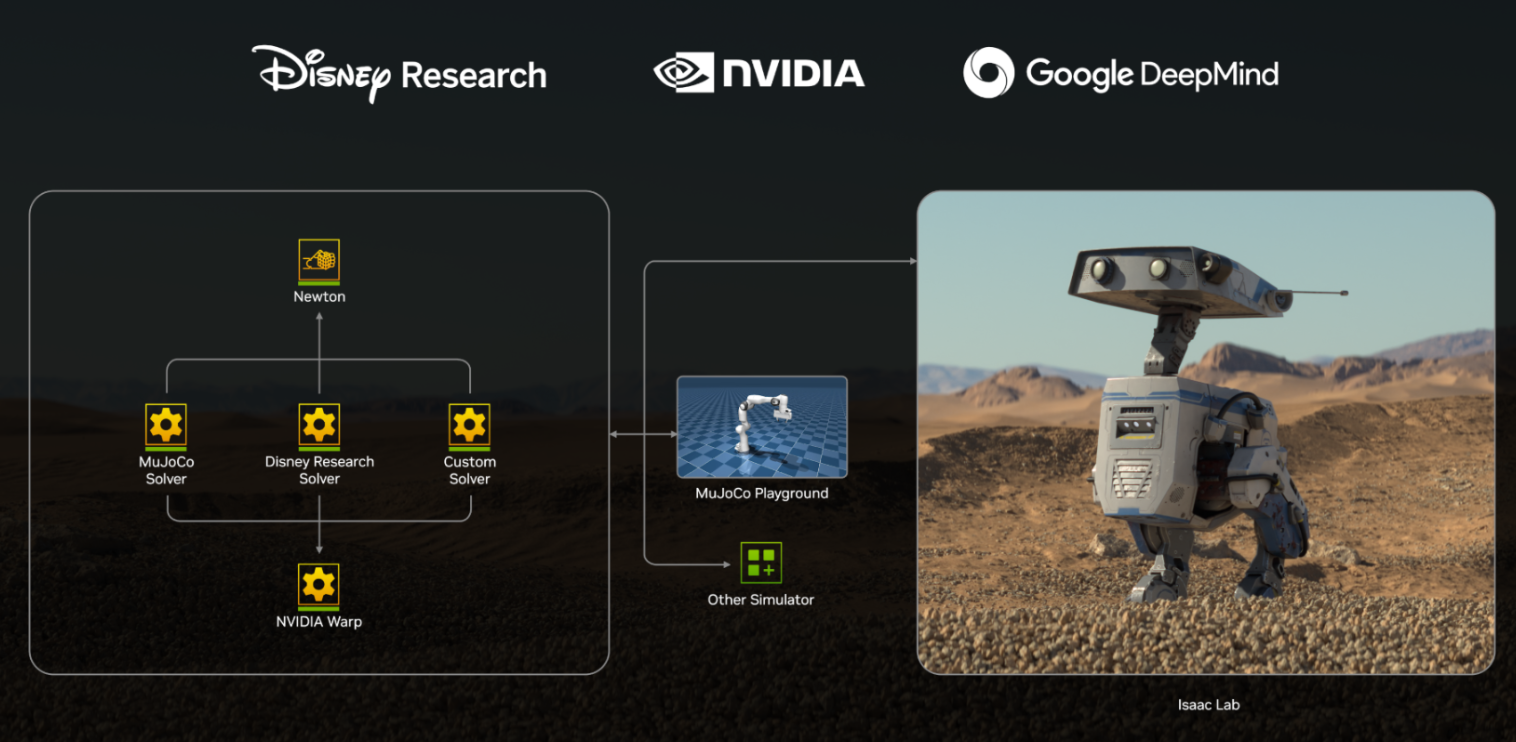
Newton 是由 NVIDIA、Google DeepMind 和 Disney Research 共同開發(fā)的一款開源、可擴展的物理引擎,旨在推動機器人學習和開發(fā)。
Newton 基于 NVIDIA Warp 構(gòu)建,使機器人能夠以更高的精度學習處理復(fù)雜任務(wù)。Newton 與 MuJoCo Playground 或 NVIDIA Isaac Lab(用于機器人學習的開源統(tǒng)一框架)等學習框架兼容。
Newton 的關(guān)鍵特點包括:
開源
Newton 是開源的,為整個機器人社區(qū)提供了強大的支持。這使得機器人專家能夠自由地使用和分發(fā)該框架,并為其發(fā)展貢獻前沿研究成果。
NVIDIA 加速
Newton 基于NVIDIA Warp 構(gòu)建,這是一個 NVIDIA CUDA-X 加速庫,使開發(fā)者能夠輕松編寫 GPU 加速、基于內(nèi)核的程序,用于仿真 AI、機器人和機器學習 (ML)。利用 NVIDIA GPU 的并行處理能力,提供了一個高性能、靈活的框架,用于構(gòu)建和運行基于物理的仿真。
由 MuJoCo-Warp 提供支持
這一計劃的一個關(guān)鍵方面是與 MuJoCo(Multi-Joint dynamics with Contact)的兼容性。MuJoCo 是一個廣泛用于機器人研究和開發(fā)的開源物理引擎,特別是在涉及復(fù)雜動力學和接觸豐富的環(huán)境中。開發(fā)人員可以利用現(xiàn)有的模型和代碼,節(jié)省時間和資源,以適應(yīng)不同的物理引擎。
Google DeepMind 首次推出了由 Warp 加速的開源機器人仿真器 MuJoCo-Warp。它使開發(fā)人員能夠?qū)崿F(xiàn)顯著的性能提升,人形機器人仿真的實現(xiàn) 70 倍以上的提速,手動操作任務(wù)實現(xiàn) 100 倍的提速。Mujoco-Warp 將作為 Newton 中的關(guān)鍵物理引擎,并通過 MuJoCo-Warp 提供。
可微物理
通過仿真?zhèn)鞑ヌ荻鹊哪芰Γ瑸闄C器人仿真和學習開辟了新的可能性。可微仿真器可以生成前向模式的結(jié)果,并計算仿真結(jié)果的反向模式梯度,用于反向傳播以優(yōu)化系統(tǒng)參數(shù)。
可擴展
隨著現(xiàn)代機器人技術(shù)范圍的擴大,仿真場景也隨之增加。Newton 具有高度可擴展性,能夠?qū)崿F(xiàn)豐富的多物理場仿真,使機器人通過自定義求解器、積分器和數(shù)值方法與食品、布料以及其他可變形物體進行互動。
Newton 還支持將不同類型的求解器相結(jié)合,例如,Material Point Method (MPM)求解器與沙子與剛體動力學相結(jié)合。
基于 OpenUSD 構(gòu)建
Newton 使用 OpenUSD 框架。OpenUSD 靈活的數(shù)據(jù)模型和合成引擎聚合了用于描述機器人及其周圍環(huán)境所需的數(shù)據(jù),而自定義求解器和其他運行時可以針對特定的機器人能力和環(huán)境進行優(yōu)化。
Disney Research 將率先使用 Newton 推動其機器人角色平臺發(fā)展,為下一代娛樂機器人提供支持。比如 GTC 主題演講中和黃仁勛一起登臺、以星球大戰(zhàn)為靈感設(shè)計的富有表現(xiàn)力的 BDX 機器人,就是該平臺的成果。
Walt Disney 想象工程研發(fā)部門高級副總裁 Kyle Laughlin 表示:“BDX 機器人只是一個開始。我們致力于以前所未有的方式,為更多角色賦予生命,而與 Disney Research、NVIDIA 和 Google DeepMind 的合作是實現(xiàn)這一愿景的關(guān)鍵。”
“此次合作將使我們能夠創(chuàng)造出比以往更具表現(xiàn)力、更具吸引力的新一代機器人角色,并以迪士尼獨有的方式與我們的游客建立聯(lián)系。”
除了 Newton 之外,Disney Research、Google DeepMind、Intrinsic 和 NVIDIA 正在合作定義用于機器人的 OpenUSD 資產(chǎn)結(jié)構(gòu)。這種新的結(jié)構(gòu)和數(shù)據(jù)管線使用 OpenUSD 內(nèi)的最佳實踐來統(tǒng)一機器人工作流,并為所有數(shù)據(jù)源提供通用語言。
敬請關(guān)注
Newton 將為推動下一代人形機器人的發(fā)展鋪平道路。這項工作的開發(fā)工作正在進行中,并計劃在今年晚些時候推出第一個版本。
了解 Newton 背后技術(shù)的更多信息:
NVIDIA Warp 是一個用于在 Python 中構(gòu)建和加速數(shù)據(jù)生成以及空間計算的開發(fā)框架。
NVIDIA Isaac Lab 基于 NVIDIA Isaac Sim 開發(fā),是一個用于機器人學習的開源統(tǒng)一框架,旨在幫助訓練機器人策略。
-
機器人
+關(guān)注
關(guān)注
213文章
29508瀏覽量
211632 -
NVIDIA
+關(guān)注
關(guān)注
14文章
5246瀏覽量
105791 -
開源
+關(guān)注
關(guān)注
3文章
3616瀏覽量
43494
原文標題:NVIDIA 推出用于機器人仿真的開源物理引擎 Newton
文章出處:【微信號:NVIDIA-Enterprise,微信公眾號:NVIDIA英偉達企業(yè)解決方案】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
NVIDIA Cosmos加速機器人和自動駕駛汽車物理AI發(fā)展

NVIDIA推出開源物理AI數(shù)據(jù)集
英偉達GTC2025亮點:NVIDIA、Alphabet 和谷歌攜手開啟代理式與物理AI的未來

NVIDIA發(fā)布GR00T N1基礎(chǔ)模型等方案,人形機器人開發(fā)效率顯著提升
英偉達GTC2025亮點 NVIDIA推出Cosmos世界基礎(chǔ)模型和物理AI數(shù)據(jù)工具的重大更新
NVIDIA Isaac GR00T N1開源人形機器人基礎(chǔ)模型+開源物理引擎Newton加速機器人開發(fā)
深度解讀英偉達Newton機器人平臺:技術(shù)革新與跨界生態(tài)構(gòu)建
NVIDIA 發(fā)布全球首個開源人形機器人基礎(chǔ)模型 Isaac GR00T N1——并推出加速機器人開發(fā)的仿真框架

NVIDIA發(fā)布Cosmos平臺,加速物理AI開發(fā)
NVIDIA Omniverse擴展至生成式物理AI領(lǐng)域
NVIDIA發(fā)布Cosmos?平臺,助力物理AI系統(tǒng)發(fā)展
NVIDIA推出多個生成式AI模型和藍圖
在算力魔方上運行Genesis:一款顛覆性開源生成式物理引擎!





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論