 NVIDIA發布GR00T N1基礎模型等方案,人形機器人開發效率顯著提升
NVIDIA發布GR00T N1基礎模型等方案,人形機器人開發效率顯著提升
電子發燒友網報道(文 / 吳子鵬) 日前,在 NVIDIA 的 GTC 大會上,該公司發布了一系列助力人形機器人開發的重要方案,其中包括首個開源人形機器人基礎模型 Isaac GR00T N1、新一代開源物理引擎 Newton,以及用于合成數據生成的全新 Omniverse Blueprint 和開源數據集。這些方案旨在幫助人形機器人方案公司攻克開發門檻高、物理仿真精度低、應用拓展難以及行業標準缺失等難題。?
開啟人形機器人開發效率革命?
人形機器人構建的是一個“人 - 機 - 環境”深度交互的復雜生態系統。現階段,針對每一項具體且精細的動作任務,都需單獨開發并調校相應的算法模型,這導致不同組件或子系統之間兼容性與互操作性欠佳,嚴重影響人形機器人的整體性能與運行效率。此外,由于軟硬件解耦難度大,使得人形機器人的調試周期漫長,還容易出現動作延遲或精度損失的情況。?
NVIDIA 發布的 GR00T N1 基礎模型,作為首個完全可定制的人形機器人基礎模型,具備通用技能,如多步操作、物體轉移等,還擁有推理能力。開發者無需從頭開始訓練,可直接基于該模型快速開發適用于物流、清潔等特定場景的應用。?
在此過程中,GR00T N1 基礎模型借鑒了人類認知原理,提供了一套雙系統架構方法論。其中,“系統 1” 是一個快速思考的動作模型,反映人類本能反應或直覺。“系統 2” 則是慢思考模型,用于進行深度思考后的決策制定。系統 2 由視覺語言模型提供支持,它會對所處環境及接收到的指令進行推理,進而規劃行動。隨后,系統 1 將這些規劃轉化為精確、連續的機器人運動。系統 1 是基于人類演示數據以及 NVIDIA Omniverse?平臺生成的海量合成數據進行訓練的。?
正如 NVIDIA 創始人兼 CEO 黃仁勛所說:“通用機器人的時代已經來臨,借助 NVIDIA Isaac GR00T N1 以及新的數據生成和機器人學習框架,全球機器人開發者將開啟 AI 時代的全新篇章。”?
實現物理仿真精度的重大突破?
在人形機器人開發過程中,高精度仿真能夠模擬真實物理環境中的力學、運動學特性,例如關節扭矩、重心偏移等,確保機器人動作符合物理規律,避免因動力學誤差導致實際測試失敗。一個優秀的仿真平臺允許在虛擬環境中反復優化機械結構,如材料強度、關節自由度,以及控制系統,如步態算法,從而降低物理原型機的重復制造和調試成本。?
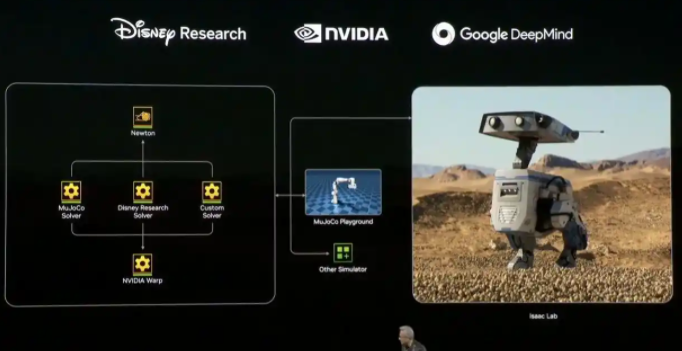
為此,NVIDIA 宣布與 Google DeepMind 和 Disney Research 展開合作,共同開發開源物理引擎 Newton。這一引擎能讓機器人以更高精度處理復雜任務。據悉,Newton 基于 NVIDIA Warp 框架進行優化,支持復雜任務的高精度模擬,并且兼容 MuJoCo 等現有框架,未來還將集成迪士尼的物理技術。Google DeepMind 正在與 NVIDIA 合作開發 MuJoCo-Warp,預計可將機器人機器學習工作負載的處理速度提升 70 倍以上,并將通過 Google DeepMind 的 MJX 開源庫和 Newton 提供給開發者。?
物理仿真精度是人形機器人實現 “設計 - 開發 - 部署” 閉環的核心支撐,直接關系到開發效率、算法可靠性以及規模化落地能力。物理引擎 Newton 針對機器人學習進行優化,可精確模擬關節扭矩、摩擦力、碰撞反饋等物理特性,提升運動控制算法,如雙足平衡、步態規劃的魯棒性,降低實際部署中硬件損傷的風險。?
更好地滿足機器人后訓練數據需求?
人形機器人要實現落地應用,后訓練環節至關重要。機器人后訓練數據指的是模型在預訓練基礎上,針對特定任務、場景或硬件進行微調所需的專項數據。這類數據直接影響模型的泛化能力、任務精度以及落地效率。?
目前,人形機器人行業發展面臨兩大困境。一是數據規模嚴重不足,若采用傳統方式獲取人機交互數據,成本極高;二是數據質量參差不齊,第三方數據供應商提供的原始數據經篩選后,實際可用率常常不足 10%。低質量數據不僅無法提升模型性能,甚至可能引入噪聲,導致訓練崩潰。?
NVIDIA Isaac GR00T Blueprint 在解決人形機器人后訓練數據不足問題上優勢顯著。該藍圖基于 Omniverse 和 NVIDIA Cosmos Transfer 世界基礎模型構建。通過少量人類演示,短短 11 小時內就能生成 780,000 個合成軌跡,相當于 6,500 小時,即連續九個月的人類演示數據。將合成數據與真實數據結合后,GR00T N1 的任務成功率提升了 40%,充分證明合成數據能有效彌補真實數據的局限性。同時,合成數據可用于預訓練,真實數據用于微調,從而平衡模型的通用性與實際場景適配性。?
結語?
《2024 全球機器人市場報告》顯示,人形機器人領域研發投入年增速已達 38%,但開發周期長、數據獲取成本高仍是行業痛點。隨著 NVIDIA 發布 GR00T N1 基礎模型、Newton 物理引擎及合成數據方案,人形機器人的開發效率和物理仿真精度得到顯著提升,后訓練數據獲取也更為高效,有力地加速了人形機器人的商業化落地進程。此外,GTC 還宣布推出 NVIDIA DGX Spark,這是一款個人 AI 超級計算機,為開發者提供一站式系統,可將 GR00T N1 的功能拓展至新機器人、任務和環境,且無需進行大量自定義編程。?
-
NVIDIA
+關注
關注
14文章
5227瀏覽量
105666 -
人形機器人
+關注
關注
6文章
672瀏覽量
17404
發布評論請先 登錄
NVIDIA 通過云端至機器人計算平臺驅動人形機器人技術,賦能物理 AI

NVIDIA與光輪智能合作實現GR00T N1落地汽車工廠
借助OpenUSD與合成數據推動人形機器人發展
NVIDIA Isaac GR00T 詳細解析
NVIDIA Isaac GR00T N1開源人形機器人基礎模型+開源物理引擎Newton加速機器人開發
NVIDIA發布全球首個開源人形機器人基礎模型Isaac GR00T N1
機器人Blue亮相 搭載英偉達最新GR00T N1人形機器人通用基礎模型
深度解讀GR00T N1:英偉達開源人形機器人功能模型的技術革新與行業影響
NVIDIA 發布全球首個開源人形機器人基礎模型 Isaac GR00T N1——并推出加速機器人開發的仿真框架

智元機器人基于NVIDIA Isaac GR00T打造高效仿真數據采集方案

NVIDIA發布Isaac GR00T Blueprint,加速人形機器人開發
NVIDIA推出Isaac GR00T Blueprint
NVIDIA發布人形機器人重磅更新!Isaac GR00T Blueprint厲害在哪?

NVIDIA Isaac 機器人平臺利用最新的生成式 AI 和先進的仿真技術,加速 AI 機器人技術的發展






 工商網監
工商網監
評論