 智元機器人基于NVIDIA Isaac GR00T打造高效仿真數據采集方案
智元機器人基于NVIDIA Isaac GR00T打造高效仿真數據采集方案
案例簡介
本案例中,智元機器人基于 NVIDIA Isaac GR00T-Teleop & GR00T-Mimic 提供的遠程仿真操作功能和強大的模仿學習合成數據生成工作流,打造了支持高保真模擬和多維度泛化的大型機器人仿真框架 Genie Sim,并推出 AgiBot Digital World(agibot-digitalworld.cn)機器人海量仿真數據集。
本案例中使用了 NVIDIA Isaac GR00T。
NVIDIA Isaac GR00T
加速仿真數采方案
模仿學習是機器人技術發展的關鍵方向之一,通過觀察和模仿人類專家的示范,機器人能夠快速掌握新技能。然而,高質量示范數據的采集往往耗時費力且成本高昂,這嚴重制約了機器人學習的效率。
為了解決這一難題,智元機器人推出了基于 NVIDIA Isaac GR00T-Teleop 和 GR00T-Mimic 技術的仿真大規模數據采集方案和海量開源仿真數據集 AgiBot Digital World,更高效地解決機器人數據稀缺的問題。
智元的仿真數據生成方案借助 Isaac Sim 高度逼真的視覺渲染和精確的物理引擎,精準還原機器人的訓練環境,并結合 GR00T-Teleop 遠程操作和 GR00T-Mimic 的數據增廣技術,快速生成高質量且多樣化的專家軌跡數據。
這不僅大幅降低了數據采集的成本和時間,還為機器人模型訓練提供了豐富的仿真數據資源,幫助機器人更高效地融入人類社會,推動各行各業的智能化轉型。
運用 GR00T-Teleop
加速仿真機器人數據采集
智元機器人利用 GR00T-Teleop 打造了更加高效易用的仿真遙操作方法。GR00T-Teleop 是 NVIDIA Project GR00T 的核心模塊之一,它通過 VR/AR 設備實現實時遠程操控,將遠程操作數據流傳輸到 NVIDIA Isaac Sim 和 NVIDIA Isaac Lab,使操作者能夠精準控制機器人在仿真環境中完成復雜動作和任務,為模仿學習提供高質量的仿真訓練數據,顯著降低了機器人技能開發的門檻。
GR00T-Teleop 支持基于 Apple Vision Pro 的遠程操作,智元在此基礎上與 NVIDIA 聯合開發,推出了適配 PICO 的遠程操作解決方案。這一創新方案已成功集成到 Genie Sim 仿真框架,為大規模仿真數據生產與開源計劃提供了強大的數據采集支持,進一步拓寬了技術的應用場景,讓機器人數據采集更加高效便捷。
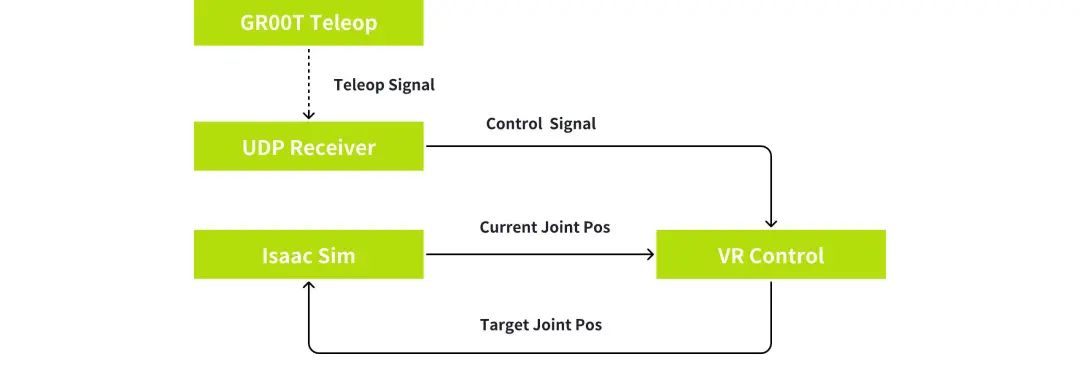
Genie Sim 基于 GR00T-Teleop 的仿真遠程操作架構
GR00T-Teleop 中的仿真遠程操作
用戶通過佩戴 PICO VR 設備,利用手柄實時控制 Isaac Sim 中智元 AgiBot G1 機器人的手臂、腰部和底盤運動。其中,手臂的控制最為復雜,系統需要實時讀取機器人的當前關節角度。當用戶移動手柄時,控制指令會同步發送到仿真系統。基于逆運動學算法,系統會結合當前關節角度與指令數據,實時解算出目標關節角度,并驅動仿真環境中的機器人完成精準的關節位姿控制。
這一過程實現了從指令輸入到動作執行的高效閉環,充分展現了遠程操作技術在機器人仿真控制中的核心作用與強大能力。

通過遠程操作采集仿真數據
通過 GR00T-Mimic
實現從人工示教到海量泛化
在 GR00T-Teleop 為具身大模型訓練提供高效且擬人的仿真數據采集功能的基礎上,智元機器人還運用 GR00T-Mimic 以少量人類示范生成大量合成運動軌跡數據,實現數據采集規模的指數級擴展。
智元機器人將 GR00T-Mimic 深度集成至 Genie Sim 仿真框架中。通過對 GR00T-Teleop 采集的初始軌跡數據進行智能泛化,智元仿真團隊成功將其擴展為數千條高精度運動軌跡。這些軌跡在 Isaac Sim 仿真環境中進行自動化驗證后,被高效轉化為具身大模型的訓練數據。
這一創新流程不僅大幅提升了仿真數據采集效率,更為具身大模型訓練提供了前所未有的高質量仿真數據集,為智能機器人的算法研發打造了堅實的數據基礎。
使用 GR00T-Mimic 生成大量合成軌跡
智元 Genie Sim:
加速機器人開發的仿真框架
智元機器人的 Genie Sim 仿真框架通過深度集成 GR00T-Teleop 和 GR00T-Mimic 技術,結合大規模、高精度的三維資產庫,為開發者提供了高效的數據生成能力。
基于 NVIDIA 的強大計算平臺和智元的創新應用,開發者能夠在短時間內積累海量機器人仿真數據,顯著降低數據采集成本,同時提升數據多樣性與質量。這一能力為機器人模型的訓練與優化奠定了堅實基礎。
此外,智元機器人的仿真框架構建了從軌跡生成、模型訓練、基準測試到部署驗證的完整評估閉環,并通過高效的仿真工具鏈,幫助用戶快速驗證算法性能并優化模型。無論是簡單的抓取任務還是復雜的長程操作,Genie Sim 都能提供高度還原的仿真環境與精準的評測指標,助力開發者高效完成機器人技術的開發與迭代。
通過與 NVIDIA 的深度合作,智元進一步提升了仿真框架的性能與可擴展性,為機器人技術的創新與應用落地提供了強有力的支持。
-
NVIDIA
+關注
關注
14文章
5227瀏覽量
105659 -
數據采集
+關注
關注
40文章
6885瀏覽量
115560 -
智元機器人
+關注
關注
1文章
19瀏覽量
731
原文標題:智元機器人使用 NVIDIA GR00T 打造高效仿真數據采集方案
文章出處:【微信號:NVIDIA-Enterprise,微信公眾號:NVIDIA英偉達企業解決方案】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
NVIDIA Isaac 機器人平臺利用最新的生成式 AI 和先進的仿真技術,加速 AI 機器人技術的發展

NVIDIA發布人形機器人重磅更新!Isaac GR00T Blueprint厲害在哪?

NVIDIA發布GR00T N1基礎模型等方案,人形機器人開發效率顯著提升
《電子發燒友電子設計周報》聚焦硬科技領域核心價值 第9期:2025.04.21--2025.04.25
NVIDIA發布一款人形機器人通用基礎模型—Project GR00T
NVIDIA推出Isaac GR00T Blueprint
NVIDIA發布Isaac GR00T Blueprint,加速人形機器人開發
NVIDIA 發布全球首個開源人形機器人基礎模型 Isaac GR00T N1——并推出加速機器人開發的仿真框架

機器人Blue亮相 搭載英偉達最新GR00T N1人形機器人通用基礎模型
NVIDIA發布全球首個開源人形機器人基礎模型Isaac GR00T N1
NVIDIA Isaac GR00T N1開源人形機器人基礎模型+開源物理引擎Newton加速機器人開發
借助OpenUSD與合成數據推動人形機器人發展
NVIDIA與光輪智能合作實現GR00T N1落地汽車工廠
NVIDIA 通過云端至機器人計算平臺驅動人形機器人技術,賦能物理 AI






 工商網監
工商網監
評論