 BEVFusion —面向自動駕駛的多任務多傳感器高效融合框架技術詳解
BEVFusion —面向自動駕駛的多任務多傳感器高效融合框架技術詳解
BEVFusion 技術詳解總結
原始論文:*附件:bevfusion.pdf
介紹(Introduction)
背景:自動駕駛系統配備了多種傳感器,提供互補的信號。但是不同傳感器的數據表現形式不同。
自動駕駛系統配備了多樣的傳感器。 例如,Waymo的自動駕駛車輛有29個攝像頭、6個雷達和5個激光雷達。 **不同的傳感器提供互補的信號:**例如,攝像機捕捉豐富的語義信息,激光雷達提供精確的空間信息,而雷達提供即時的速度估計。 因此,多傳感器融合對于準確可靠的感知具有重要意義。**來自不同傳感器的數據以根本不同的方式表示:**例如,攝像機在透視圖中捕獲數據,激光雷達在3D視圖中捕獲數據。
1. 核心目標與創新?
- 目標? 解決多模態傳感器(攝像頭、激光雷達等)在3D感知任務中的異構數據融合難題,實現高效、通用的多任務學習(如3D檢測、BEV分割)
- 核心創新?
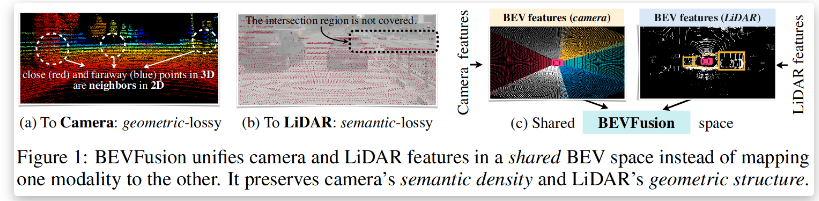
- ?統一BEV表示 將多模態特征映射到共享的鳥瞰圖(BEV)空間,保留幾何結構(激光雷達優勢)和語義密度(攝像頭優勢)
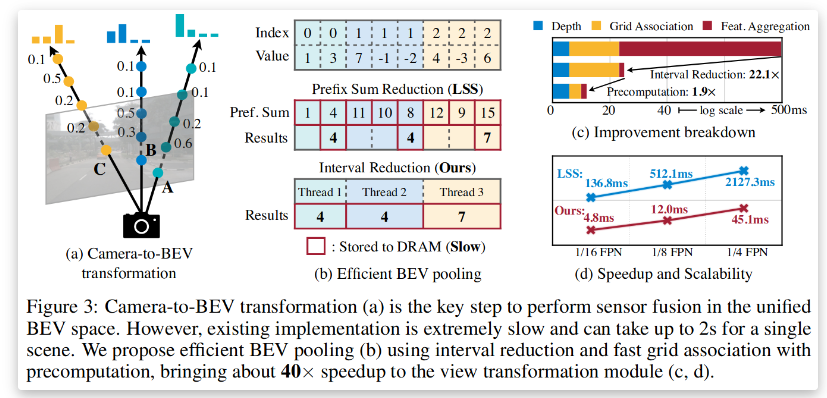
- ?優化BEV池化 通過預計算和間隔縮減技術,將BEV池化速度提升40%以上
- ?全卷積融合 解決激光雷達與攝像頭BEV特征的空間錯位問題,提升融合魯棒性
2. 技術框架與關鍵模塊?
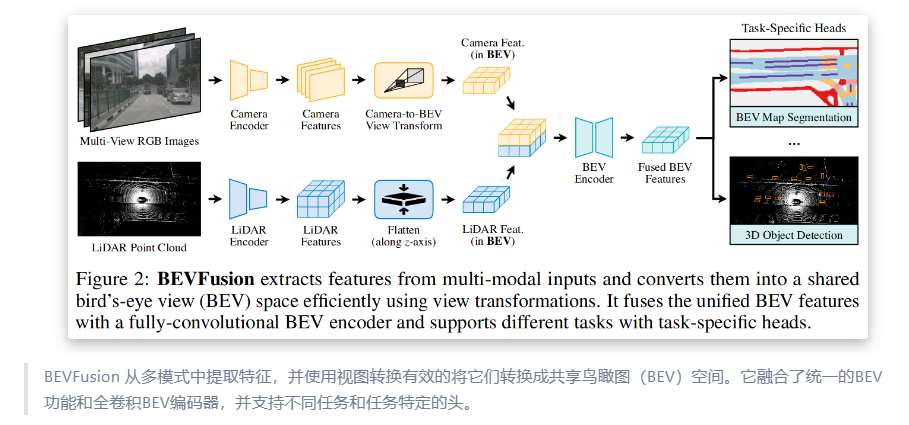
?2.1 多模態特征提取
- ?傳感器輸入
- ?攝像頭 多視角圖像(透視視圖)
- ?激光雷達 點云數據(3D視圖)
- ?模態專用編碼器
- ?攝像頭 2D卷積神經網絡(如ResNet)提取圖像特征
- ?激光雷達 3D稀疏卷積網絡(如VoxelNet)提取點云特征
?2.2 統一BEV表示構建
- ?攝像頭到BEV的轉換
- ?深度分布預測 顯式預測每個像素的離散深度分布(避免幾何失真)
- ?特征投影 沿相機射線將像素特征分散到離散3D點,通過BEV池化聚合特征(見圖1)
- ?優化加速 預計算相機內外參矩陣,減少實時計算開銷
- ?激光雷達到BEV的轉換 直接通過體素化將點云映射到BEV網格
?2.3 全卷積特征融合
- ?融合策略
- ?通道級聯 將攝像頭和激光雷達的BEV特征拼接,輸入全卷積網絡(FCN)
- ?空間對齊補償 通過可變形卷積或注意力機制緩解特征錯位問題
?2.4 多任務頭設計
- ?3D物體檢測 基于融合后的BEV特征,采用Anchor-free或CenterPoint范式預測邊界框
- ?BEV地圖分割 全卷積解碼器輸出語義分割結果(如車道線、可行駛區域)
?3. 性能優勢與實驗驗證
? 3.1 基準測試結果(NuScenes數據集)
| ?任務 | ?模型類型 | ?性能指標 | ?BEVFusion優勢 |
|---|---|---|---|
| 3D物體檢測 | 純攝像頭模型 | mAP: 35.1% | ?mAP: 68.5%(+33.4%) |
| 3D物體檢測 | 純激光雷達模型 | mAP: 65.2% | ?mAP: 68.5%(+3.3%) |
| BEV地圖分割 | 純攝像頭模型 | mIoU: 44.7% | ?mIoU: 50.7%(+6.0%) |
| BEV地圖分割 | 純激光雷達模型 | mIoU: 37.1% | ?mIoU: 50.7%(+13.6%) |
?3.2 效率對比
- ?計算成本 BEVFusion的計算量僅為同類多模態模型的50%(1.9倍低于純激光雷達模型)
- ?推理速度 優化后的BEV池化使端到端延遲降低40%
?4. 與傳統方法的對比分析
?4.1 早期融合 vs. 晚期融合
| ?方法 | ?優勢 | ?劣勢 |
|---|---|---|
| 早期融合(特征級) | 保留原始數據信息 | 異構特征難以對齊(如幾何失真) |
| 晚期融合(決策級) | 模態獨立性高 | 語義信息丟失,任務性能受限 |
| ?BEVFusion | ?統一BEV空間平衡幾何與語義 | 需優化特征對齊與計算效率 |
?4.2 其他多模態模型對比
- ?PointPainting 將攝像頭語義注入點云,但依賴激光雷達主導,無法充分發揮攝像頭優勢
- ?TransFusion 基于Transformer的融合,計算復雜度高,實時性差
?5. 局限性與未來方向
- ?局限性
- ?動態場景適應性 BEV靜態假設可能影響運動物體感知
- ?傳感器依賴性 仍需激光雷達提供幾何先驗
- ?未來方向
- ?純視覺BEV泛化 探索無激光雷達的BEV感知(如4D標注數據增強)
- ?時序融合 引入多幀BEV特征提升動態場景理解
?總結
BEVFusion通過統一的BEV表示空間和高效融合機制,解決了多模態傳感器在幾何與語義任務中的權衡問題,成為自動駕駛多任務感知的標桿框架其設計范式為后續研究提供了重要啟發 ?**“統一表示+輕量優化”是多模態融合的核心方向**
項目鏈接
- 官方網頁:https://hanlab.mit.edu/projects/bevfusion
- 原始論文:https://arxiv.org/abs/2205.13542
- 項目地址:https://github.com/mit-han-lab/bevfusion
參考資料
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
自動駕駛
+關注
關注
788文章
14193瀏覽量
169488
發布評論請先 登錄
相關推薦
熱點推薦
Vicor高效電源模塊優化自動駕駛系統
低壓(48V)自動駕駛電動穿梭車配備了先進的自動駕駛系統,能夠在復雜的城市道路上自動行駛。GPU 和傳感器是自動駕駛系統的關鍵組件,依賴高性
AI將如何改變自動駕駛?
自動駕駛帶來哪些變化?其實AI可以改變自動駕駛技術的各個環節,從感知能力的提升到決策框架的優化,從安全性能的增強到測試驗證的加速,AI可以讓自動駕駛
技術分享 |多模態自動駕駛混合渲染HRMAD:將NeRF和3DGS進行感知驗證和端到端AD測試
多模態自動駕駛混合渲染HRMAD,融合NeRF與3DGS技術,實現超10萬㎡場景重建,多傳感器實


一文聊聊自動駕駛測試技術的挑戰與創新
,包括場景生成的多樣性與準確性、多傳感器數據融合的精度驗證、高效的時間同步機制,以及仿真平臺與實際場景的匹配等問題。 自動駕駛測試的必要性與

MEMS技術在自動駕駛汽車中的應用
MEMS技術在自動駕駛汽車中的應用主要體現在傳感器方面,這些傳感器為自動駕駛汽車提供了關鍵的環境感知和數據采集能力。以下是對MEMS
人工智能的應用領域有自動駕駛嗎
的核心技術 自動駕駛汽車的核心依賴于人工智能,尤其是機器學習和深度學習技術。這些技術使得汽車能夠通過傳感器收集大量數據,并實時進行分析。以下
FPGA在自動駕駛領域有哪些優勢?
領域的主要優勢:
高性能與并行處理能力:
FPGA內部包含大量的邏輯門和可配置的連接,能夠同時處理多個數據流和計算任務。這種并行處理能力使得FPGA在處理自動駕駛中復雜的圖像識別、傳感器數據處理等
發表于 07-29 17:11
FPGA在自動駕駛領域有哪些應用?
低,適合用于實現高效的圖像算法,如車道線檢測、交通標志識別等。
雷達和LiDAR處理:自動駕駛汽車通常會使用雷達和LiDAR(激光雷達)等多種傳感器來獲取環境信息。FPGA能夠協助完成這些傳感
發表于 07-29 17:09
自動駕駛識別技術有哪些
自動駕駛的識別技術是自動駕駛系統中的重要組成部分,它使車輛能夠感知并理解周圍環境,從而做出智能決策。自動駕駛識別技術主要包括多種
自動駕駛汽車傳感器有哪些
自動駕駛汽車傳感器是實現自動駕駛功能的關鍵組件,它們通過采集和處理車輛周圍環境的信息,為自動駕駛系統提供必要的感知和決策依據。以下是對自動駕駛
XV7181BB 陀螺儀傳感器在自動駕駛設備中的應用
自動駕駛技術正在迅速發展,改變著交通運輸的未來。為了實現安全、穩定和高效的自動駕駛,車輛需要依賴先進的傳感器






 工商網監
工商網監
評論