") Cortex-A53嵌入式處理器平臺上實現(xiàn)激光雷達(dá)SLAM的方法
Cortex-A53嵌入式處理器平臺上實現(xiàn)激光雷達(dá)SLAM的方法
自主移動機(jī)器人]是近幾年的研究熱點,要實現(xiàn)機(jī)器人的自主移動,關(guān)鍵是要實現(xiàn)SLAM[4-7](Simultaneous Localization and Mapping),也就是同時定位與地圖構(gòu)建。
在移動機(jī)器人上實現(xiàn)SLAM目前有兩種主流的方法,一是基于相機(jī)的SLAM;二是基于激光雷達(dá)[8]的SLAM。在SLAM的實現(xiàn)中最常用的硬件處理器平臺是Intel x86平臺,如TurtleBot移動機(jī)器人上的硬件處理器平臺就是一臺筆記本。在移動機(jī)器人上實現(xiàn)SLAM的硬件成本比較高,這是自主移動機(jī)器人難以進(jìn)入服務(wù)市場的主要原因之一。為了解決這個問題,本文在基于Cortex-A53的處理器平臺上配以激光雷達(dá)實現(xiàn)了室內(nèi)環(huán)境下的SLAM。
1關(guān)于用低成本實現(xiàn)SLAM的思考
在移動機(jī)器人中用嵌入式處理器實現(xiàn)SLAM是一種趨勢,一是由于嵌入式處理器平臺對工業(yè)現(xiàn)場環(huán)境有較好的適應(yīng)性,二是成本相對較低。但是嵌入式處理器相對于SLAM問題來說,其性能不夠高,所以在這種相對低性能的處理器上實現(xiàn)SLAM要解決的主要問題就是要降低計算量,并且需要對算法進(jìn)行優(yōu)化,使得所實現(xiàn)的SLAM能滿足實際使用要求。基于激光雷達(dá)的SLAM相對于基于相機(jī)的SLAM來說,它的算法相對簡單,計算量相對較小,對處理器的性能要求相對較低,所以才可以在性能較低的ARM平臺上實現(xiàn),所以選擇用激光雷達(dá)作為SLAM的測量輸入。
2擴(kuò)展卡爾曼濾波與粒子濾波
2.1 擴(kuò)展卡爾曼濾波與粒子濾波
目前實現(xiàn)SLAM的兩種最主要的方法是擴(kuò)展卡爾曼濾波和粒子濾波。基于擴(kuò)展卡爾曼濾波(EKF)的SLAM算法[8]對非線性的運動模型和觀測模型采用線性化來解決,其線性化的方法是在目標(biāo)點附近做泰勒展開并去除其高階部分,如果模型的非線性程度很大,就很容易使算法產(chǎn)生較大誤差,因此非線性就成了這種SLAM算法中的一個很嚴(yán)重的問題[9],且EKF還是基于高斯假設(shè)的,運動模型和觀測模型中的噪聲都要滿足高斯分布,這樣使得算法的使用受到限制。粒子濾波中用一定大小的采樣樣本的頻率分布來表示概率分布,當(dāng)樣本數(shù)量趨于無窮時,粒子集的概率密度函數(shù)可以近似于任意形式的概率密度分布,因此粒子濾波可以處理任意形式的狀態(tài)空間模型,而不局限于高斯噪聲模型。
在粒子濾波中,把從后驗分布中獲得的采樣稱作粒子,粒子是對真實世界中待確定的狀態(tài)的一種假設(shè)。采樣后的粒子集St表示為:
2.2 基于粒子濾波的SLAM的實現(xiàn)步驟
SLAM是這樣的一個過程:當(dāng)機(jī)器人處于一個未知環(huán)境中且自身位置未知時,移動機(jī)器人在向前運動過程中可以構(gòu)建環(huán)境地圖,并同時利用構(gòu)建的地圖來估計自身的位置。本文中的SLAM是基于粒子濾波算法來實現(xiàn)的。
在一個陌生的環(huán)境中,機(jī)器人位置的初始信度未知,所以認(rèn)為機(jī)器人可能位于當(dāng)前環(huán)境中的任何一個位置。從表示當(dāng)前環(huán)境的狀態(tài)空間的均勻分布中隨機(jī)采樣N個粒子來表示機(jī)器人的初始信度分布。本文中用于地圖構(gòu)建的SLAM算法描述如下:
3在Cortex-A53平臺上實現(xiàn)SLAM的方法
整個系統(tǒng)的構(gòu)建過程如下:
(1)軟件平臺中使用的操作系統(tǒng)是支持ARM架構(gòu)處理器的Ubuntu mate16.04 LTS系統(tǒng);
(2)使用的ROS(Robot Operating System)機(jī)器人操作系統(tǒng)是kinetic版本;
(3)進(jìn)行網(wǎng)絡(luò)配置,把處理器平臺上的WiFi模塊配置成Access Point(AP)模式,讓上位機(jī)可以接入AP與Cortex-A53處理器平臺通信,這樣就可以在個人計算機(jī)上通過遠(yuǎn)程登錄來操控機(jī)器人;
(4)把上位機(jī)配置成時間服務(wù)器,讓Cortex-A53平臺每次上電后能與上位機(jī)的時間保持同步;
(5)構(gòu)建地圖使用了粒子濾波方法。在未知環(huán)境中是通過粒子濾波來實現(xiàn)機(jī)器人定位的,并在定位的基礎(chǔ)上根據(jù)激光雷達(dá)的觀測數(shù)據(jù)來構(gòu)建地圖;
(6)在已知地圖的基礎(chǔ)上定位是通過粒子濾波實現(xiàn)的,機(jī)器人可以根據(jù)當(dāng)前的激光雷達(dá)掃描數(shù)據(jù)和里程計數(shù)據(jù)實現(xiàn)對自身的定位;
(7)有了環(huán)境地圖,并且機(jī)器人可以對自身定位,再通過路徑規(guī)劃就可以實現(xiàn)機(jī)器人導(dǎo)航。全局路徑規(guī)劃使用Dijkstra算法,在成本地圖上尋找從起點到終點的最低成本路徑。局部路徑規(guī)劃的算法思想為:在機(jī)器人可以運動的速度和旋轉(zhuǎn)角度范圍內(nèi)對速度和角度進(jìn)行離散采樣;根據(jù)機(jī)器人的當(dāng)前狀態(tài)對每一個采樣速度進(jìn)行向前的運動模擬,根據(jù)模擬過程中機(jī)器人與障礙物的接近程度、與目標(biāo)的接近程度以及與全局路徑的接近程度等來給每條模擬軌跡打分,并放棄不合理的路線;最后選擇得分最高的路線并給底座發(fā)送相應(yīng)的速度指令來讓機(jī)器人運動。此種算法在局部路徑規(guī)劃過程中會在整個向前運動模擬過程中持續(xù)對速度采樣;
(8)對程序進(jìn)行優(yōu)化,減小Cortex-A53處理器平臺的計算壓力。
系統(tǒng)構(gòu)建完成后就可以在上位機(jī)上實時觀察構(gòu)建的地圖,并可以在上位機(jī)上用軟件來給機(jī)器人指定目標(biāo),實現(xiàn)機(jī)器人自主導(dǎo)航。
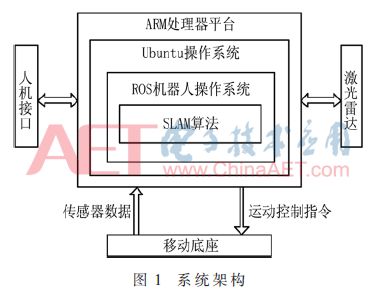
移動底座和激光雷達(dá)與Cortex-A53平臺都是通過串口來通信的。在基于Cortex-A53處理器的平臺上處理激光雷達(dá)的掃描數(shù)據(jù)以及底座中采集的里程計數(shù)據(jù),結(jié)合激光雷達(dá)的數(shù)據(jù)和里程計數(shù)據(jù)實現(xiàn)機(jī)器人的定位,并在定位的基礎(chǔ)上利用雷達(dá)掃描數(shù)據(jù)實現(xiàn)二維地圖構(gòu)建。在對應(yīng)的人機(jī)接口上可以通過軟件在掃描地圖的基礎(chǔ)上給機(jī)器人指定目的地來進(jìn)行導(dǎo)航。
系統(tǒng)的架構(gòu)如圖1所示。
4算法優(yōu)化
4.1 構(gòu)圖算法的優(yōu)化
Cortex-A53處理器平臺結(jié)合激光雷達(dá)實現(xiàn)地圖構(gòu)建。圖2為未優(yōu)化的地圖。

從前文可知,地圖構(gòu)建是通過匹配得分最高的最優(yōu)粒子結(jié)合激光雷達(dá)的掃描數(shù)據(jù)來實現(xiàn)的。構(gòu)圖算法的優(yōu)化方法為:通過給掃描匹配得分設(shè)定一個閾值minimumScore來提高所得地圖的精度。
這個閾值表示在粒子濾波過程中進(jìn)行掃描匹配時要求的最小匹配得分,這個值設(shè)置的越大,就表示對掃描匹配的要求越高。如果閾值設(shè)置過高,很容易導(dǎo)致匹配失敗,機(jī)器人會選擇使用里程計的數(shù)據(jù),這樣就會使得對機(jī)器人姿態(tài)估計的準(zhǔn)確度降低,從而導(dǎo)致構(gòu)圖精度降低;如果閾值設(shè)置過低,掃描匹配很容易成功,會導(dǎo)致地圖中出現(xiàn)大量噪聲。設(shè)置合理的閾值可以加快機(jī)器人定位過程的收斂,得到精度更高的地圖。本次實驗過程中測得的閾值范圍約為60~80,閾值范圍取決于激光雷達(dá)的測量范圍、角度分辨率、測量精度以及環(huán)境特征。圖3為優(yōu)化后的地圖。

4.2 路徑規(guī)劃算法的優(yōu)化
在系統(tǒng)構(gòu)建過程中發(fā)現(xiàn)在Cortex-A53處理器平臺上使用的局部路徑規(guī)劃算法無法實現(xiàn)局部路徑規(guī)劃,因為這種算法的計算量太大,在路徑規(guī)劃過程中處理器CPU占用率達(dá)到100%,但路徑規(guī)劃依然無法執(zhí)行,此平臺無法滿足該算法的要求。
使用改進(jìn)后的局部路徑規(guī)劃算法機(jī)器人可以正常執(zhí)行導(dǎo)航功能。改進(jìn)后的路徑規(guī)劃算法只對一步向前運動模擬進(jìn)行速度采樣。這就使得速度采樣的樣本空間大大減小,因而改進(jìn)后的局部路徑規(guī)劃算法更高效,對計算能力的要求會相對較低。但是當(dāng)對機(jī)器人的加速度限制較小時,改進(jìn)后的算法性能可能會不如改進(jìn)前的算法性能好。不過在室內(nèi)環(huán)境下,機(jī)器人運動的加速度會相對比較小,所以改進(jìn)后的算法適合在室內(nèi)條件下進(jìn)行局部路徑規(guī)劃。
5總結(jié)
本文提出了在Cortex-A53嵌入式處理器平臺上實現(xiàn)激光雷達(dá)SLAM的方法,實現(xiàn)了地圖構(gòu)建和地圖優(yōu)化,以及移動機(jī)器人室內(nèi)環(huán)境下的導(dǎo)航、實時避障等功能。實踐證明,該方法效果較好,對處理器性能要求較低。后續(xù)的研究將集中在如何使用消費級的激光雷達(dá)來實現(xiàn)SLAM上,從而更有效地降低移動機(jī)器人實現(xiàn)SLAM的成本。
-
嵌入式處理器
+關(guān)注
關(guān)注
0文章
256瀏覽量
31127 -
激光雷達(dá)
+關(guān)注
關(guān)注
971文章
4192瀏覽量
191918
原文標(biāo)題:【學(xué)術(shù)論文】基于Cortex-A53平臺的激光雷達(dá)SLAM實現(xiàn)
文章出處:【微信號:ChinaAET,微信公眾號:電子技術(shù)應(yīng)用ChinaAET】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
嵌入式云計算與視頻大數(shù)據(jù)——基于TI嵌入式處理器
消費級激光雷達(dá)的起航
AGV激光雷達(dá)SLAM定位導(dǎo)航技術(shù)
基于深度神經(jīng)網(wǎng)絡(luò)的激光雷達(dá)物體識別系統(tǒng)及其嵌入式平臺部署
當(dāng)“思嵐”激光雷達(dá)邂逅盲人拐杖
基于深度神經(jīng)網(wǎng)絡(luò)的激光雷達(dá)物體識別系統(tǒng)
激光雷達(dá)點云數(shù)據(jù)分割算法的嵌入式平臺上的部署實現(xiàn)
基于Cortex-A53架構(gòu)的低功耗高性能處理器RK3328有哪些功能呢
Cortex-A53循環(huán)模型9.6.0版用戶指南
ARM Cortex-A53 MPCore技術(shù)參考手冊
基于CORTEX_A8處理器的嵌入式數(shù)控系統(tǒng)實時平臺的設(shè)計與實現(xiàn)

對Cortex-A53處理器的性能分析及特點概述
自動駕駛 | MINet:嵌入式平臺上的實時Lidar點云數(shù)據(jù)分割算法






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論