") 幫您輕松實(shí)現(xiàn)Canopen轉(zhuǎn)EtherCAT網(wǎng)關(guān)連接伺服驅(qū)動(dòng)
幫您輕松實(shí)現(xiàn)Canopen轉(zhuǎn)EtherCAT網(wǎng)關(guān)連接伺服驅(qū)動(dòng)
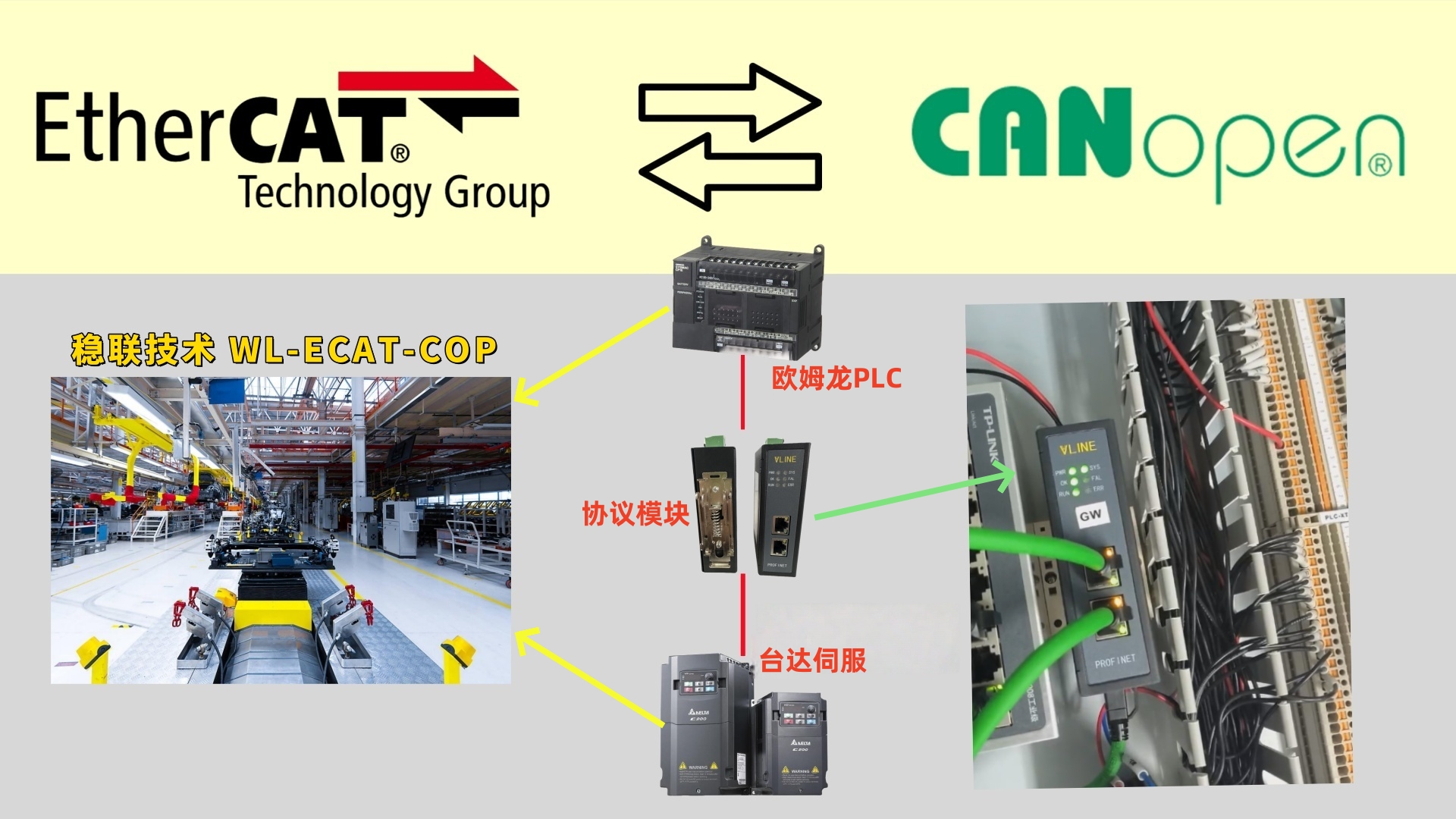
實(shí)現(xiàn)CANopen轉(zhuǎn)EtherCAT網(wǎng)關(guān)連接伺服驅(qū)動(dòng)涉及多個(gè)步驟和技術(shù)要點(diǎn)。以下是一個(gè)基本的指南,幫助你理解如何實(shí)現(xiàn)這一目標(biāo): 
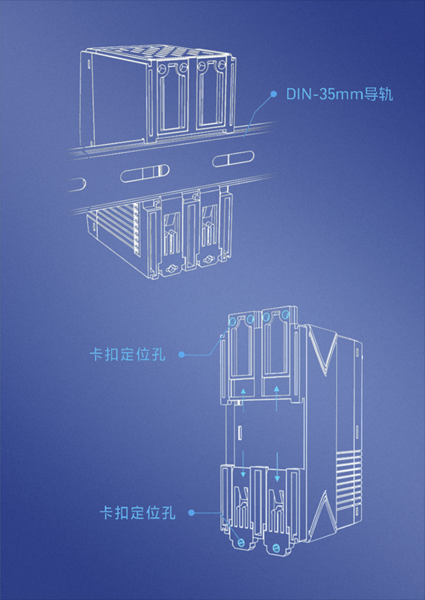
1. 硬件選擇
CANopen轉(zhuǎn)EtherCAT網(wǎng)關(guān):
●選擇一個(gè)支持CANopen和EtherCAT通信協(xié)議的網(wǎng)關(guān)設(shè)備。確保網(wǎng)關(guān)具有足夠的輸入/輸出(I/O)點(diǎn)數(shù),以滿足你的伺服驅(qū)動(dòng)系統(tǒng)需求。
● 驗(yàn)證網(wǎng)關(guān)的兼容性,包括電源、通信速率、連接器等。
伺服驅(qū)動(dòng)器:
● 確保你的伺服驅(qū)動(dòng)器支持CANopen或EtherCAT(取決于你的網(wǎng)關(guān)配置和轉(zhuǎn)換需求)。
● 選擇與你的應(yīng)用相匹配的伺服驅(qū)動(dòng)器型號(hào)和功率。
連接線材:
●準(zhǔn)備CANopen和EtherCAT所需的連接線材和連接器。
●確保線材的質(zhì)量和長(zhǎng)度符合你的通信需求。
2. 軟件配置
網(wǎng)關(guān)配置:
● 使用網(wǎng)關(guān)提供的配置工具或軟件,設(shè)置CANopen和EtherCAT的參數(shù)。
● 配置CANopen從站的地址、波特率等參數(shù)。
● 配置EtherCAT主站的參數(shù),包括網(wǎng)絡(luò)拓?fù)洹/O映射等。
伺服驅(qū)動(dòng)器配置:
● 使用伺服驅(qū)動(dòng)器的配置軟件或工具,設(shè)置驅(qū)動(dòng)器的參數(shù)。
● 確保驅(qū)動(dòng)器與網(wǎng)關(guān)的通信參數(shù)匹配,包括波特率、地址等。
PLC或運(yùn)動(dòng)控制器配置:
● 如果你使用PLC或運(yùn)動(dòng)控制器來(lái)管理伺服驅(qū)動(dòng)器,確保它們與EtherCAT網(wǎng)絡(luò)兼容。
● 配置PLC或運(yùn)動(dòng)控制器的EtherCAT主站參數(shù),以識(shí)別和管理伺服驅(qū)動(dòng)器。
3. 網(wǎng)絡(luò)連接
物理連接:
● 使用CANopen連接線將伺服驅(qū)動(dòng)器連接到網(wǎng)關(guān)的CANopen端口。
● 使用EtherCAT連接線將網(wǎng)關(guān)連接到PLC或運(yùn)動(dòng)控制器的EtherCAT網(wǎng)絡(luò)。
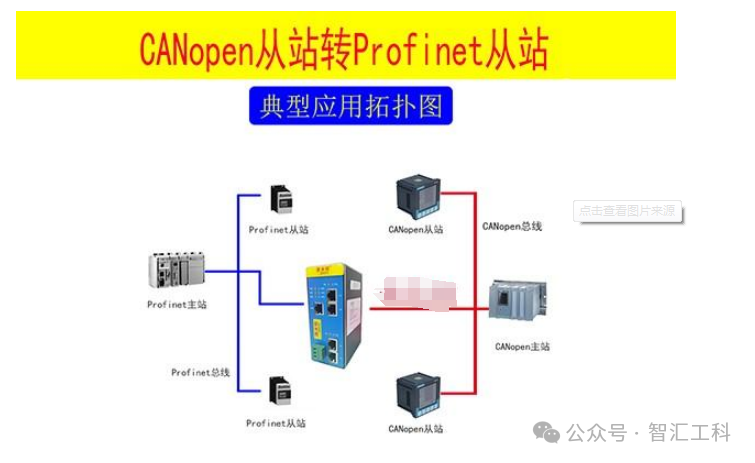
網(wǎng)絡(luò)拓?fù)洌?br />
● 確保EtherCAT網(wǎng)絡(luò)的拓?fù)浣Y(jié)構(gòu)符合你的應(yīng)用需求,如線性、星形等。
● 使用適當(dāng)?shù)木W(wǎng)絡(luò)組件,如交換機(jī)、耦合器等,來(lái)構(gòu)建你的EtherCAT網(wǎng)絡(luò)。
4. 調(diào)試與測(cè)試
通信測(cè)試:
● 使用通信測(cè)試工具或軟件,驗(yàn)證CANopen和EtherCAT網(wǎng)絡(luò)的通信狀態(tài)。
● 確保網(wǎng)關(guān)能夠正確地與伺服驅(qū)動(dòng)器和PLC或運(yùn)動(dòng)控制器進(jìn)行通信。
功能測(cè)試:
● 在安全的環(huán)境下,對(duì)伺服驅(qū)動(dòng)器進(jìn)行功能測(cè)試,確保其能夠按照預(yù)期工作。
● 監(jiān)控和記錄任何通信或性能問(wèn)題,以便進(jìn)行調(diào)試和修復(fù)。
5. 維護(hù)與優(yōu)化
監(jiān)控與診斷:
● 定期檢查CANopen和EtherCAT網(wǎng)絡(luò)的通信狀態(tài)。
● 使用網(wǎng)關(guān)和伺服驅(qū)動(dòng)器提供的監(jiān)控和診斷工具,識(shí)別和解決潛在的問(wèn)題。
性能優(yōu)化:
● 根據(jù)你的應(yīng)用需求,優(yōu)化網(wǎng)關(guān)和伺服驅(qū)動(dòng)器的性能參數(shù)。
● 考慮使用更高效的通信協(xié)議或算法,以提高系統(tǒng)的整體性能。
通過(guò)以上步驟,你可以實(shí)現(xiàn)CANopen轉(zhuǎn)EtherCAT網(wǎng)關(guān)連接伺服驅(qū)動(dòng)的目標(biāo)。請(qǐng)注意,具體的實(shí)現(xiàn)過(guò)程可能因你的設(shè)備和應(yīng)用而有所不同,因此建議查閱相關(guān)設(shè)備的文檔和指南,以獲取更詳細(xì)的信息和指導(dǎo)。
審核編輯 黃宇
-
網(wǎng)關(guān)
+關(guān)注
關(guān)注
9文章
5329瀏覽量
52492 -
CANopen
+關(guān)注
關(guān)注
8文章
346瀏覽量
44506 -
伺服驅(qū)動(dòng)
+關(guān)注
關(guān)注
3文章
93瀏覽量
17990 -
ethercat
+關(guān)注
關(guān)注
19文章
1000瀏覽量
39638
發(fā)布評(píng)論請(qǐng)先 登錄
協(xié)議大和解:ETHERCAT轉(zhuǎn)CANopen網(wǎng)關(guān)配置

汽車(chē)生產(chǎn)中的測(cè)試臺(tái)連接 – EtherCAT 轉(zhuǎn)CANopen高效的網(wǎng)關(guān)通信

CANopen轉(zhuǎn)EtherCAT網(wǎng)關(guān)連接伺服驅(qū)動(dòng)

3步輕松實(shí)現(xiàn)Canopen轉(zhuǎn)EtherCAT網(wǎng)關(guān)連接伺服驅(qū)動(dòng)!
CANOpen轉(zhuǎn)PROFINET網(wǎng)關(guān)連接低壓伺服系統(tǒng)
奇妙聯(lián)動(dòng)!EtherCAT轉(zhuǎn)CANopen網(wǎng)關(guān)與傳感器開(kāi)啟宇宙導(dǎo)航

CANopen轉(zhuǎn)EtherCAT網(wǎng)關(guān)連接伺服驅(qū)動(dòng)

CANopen轉(zhuǎn)EtherCAT網(wǎng)關(guān)連接伺服驅(qū)動(dòng)

3步輕松實(shí)現(xiàn)Canopen轉(zhuǎn)EtherCAT網(wǎng)關(guān)連接伺服驅(qū)動(dòng)!
探索 CAN 轉(zhuǎn) PN 網(wǎng)關(guān)連接 can 設(shè)備的精準(zhǔn)配置之道

Profinet轉(zhuǎn)CanOpen網(wǎng)關(guān)連接與CanOpen協(xié)議磁軌道實(shí)現(xiàn)高效連接

DeviceNet轉(zhuǎn)CANopen協(xié)議網(wǎng)關(guān)(DeviceNet轉(zhuǎn)CANopen)

EtherCAT從站轉(zhuǎn)CANopen主站協(xié)議網(wǎng)關(guān)(YC-ECT-COP)

EtherCAT從站轉(zhuǎn)CANopen主站協(xié)議網(wǎng)關(guān)(JM-ECT-COP)
CANopen轉(zhuǎn)EtherCAT協(xié)議轉(zhuǎn)換網(wǎng)關(guān)配置案例





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論