 自主移動機器人設計指南
自主移動機器人設計指南
自主移動機器人(AMR)是一種復雜的系統,與自動駕駛汽車有許多共同之處--它們需要感知、電機驅動、電源轉換、照明和電池管理。也許最大的挑戰是將這些子系統整合到一個最終產品中--由于需要集成來自不同供應商的不同子系統,這一挑戰變得更加困難。
本文將探討AMR的復雜世界,并考慮選擇由一家解決方案提供商來負責AMR所有關鍵方面的設計——其優勢包括降低設計/集成風險和縮短上市時間。
自動導引車(AGV)主要在室內運行,并按照預先確定的路線行駛(通常使用地面上的線條作為引導),自主移動機器人(AMR)則要復雜得多,能夠在室內和室外自由導航,而不必遵循預定義的路線。在這方面,它們類似于自動駕駛車輛,因為它們必須識別并避開路徑上的障礙物,無論障礙物是靜止的還是移動的。
幾乎所有AMR的核心都是五個主要子系統,分別管理電源、運動、感知、處理和照明。每個子系統本身都很復雜,設計起來往往具有挑戰性,同時也是AMR成功運行的基礎。然而,集成往往是最大的挑戰--尤其是從不同供應商處采購子系統或主要部件時。
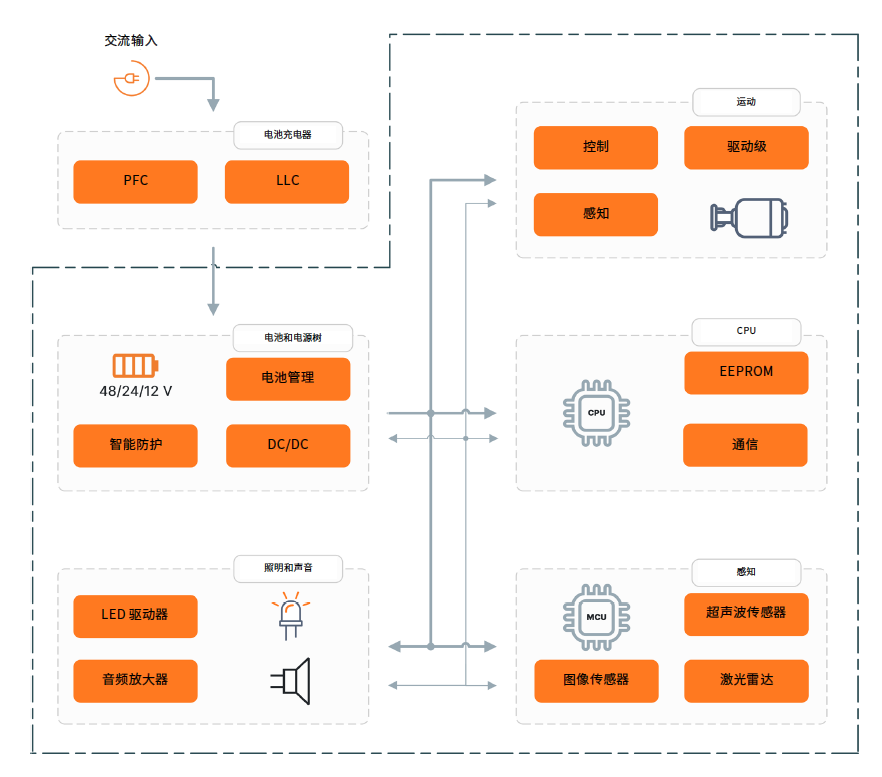
圖1- 典型AMR的關鍵子系統
要使AMR正常運行,子系統之間的信息流和功率流至關重要,這意味著要有一個通用的接口和經過測試可協同工作的部件,以消除兼容性問題。簡單來說,從一個解決方案供應商處采購關鍵系統元件有助于降低開發風險,縮短上市時間,并在競爭激烈的市場中保持領先地位。
構建系統集成的AMR
感知對于在自由空間中導航的自主移動機器人(AMR)至關重要,尤其是在沒有軌道或其他導航輔助設備可用的情況下。AMR必須能夠找到安全的路線,并處理路徑上的靜態和移動障礙物。為了克服天氣或照明條件的限制,并適應不同的距離,會使用包括圖像傳感器、超聲波和激光雷達(LiDAR)在內的多種技術。來自多個傳感器的數據會被整合,以便更好地了解周圍環境。這種技術被稱為傳感器融合,它提供了更好的可靠性、冗余性和安全性。
安森美(onsemi)一直是智能感知技術的領導者。安森美提供從VGA到4500萬像素的各種卷簾曝光和全局曝光圖像傳感器。這些傳感器在動態范圍方面具有業界先進的性能,并具備如運動喚醒和自動曝光控制等創新特性。除圖像傳感器之外,安森美還提供用于測距(LiDAR)的硅光電倍增管(SiPM)、超聲波傳感器、電感式傳感器以及支持到達角(AoA)和出發角(AoD)的Bluetooth低功耗(BLE)技術微控制器,這些可以用于定位。
運動控制在 AMR中非常重要。通常使用無刷直流(BLDC)電機,需要復雜的算法進行精確控制。無刷直流電機驅動級需要許多元器件來正確控制。NCD83591三相柵極驅動器通過開啟和關閉功率開關來控制換相,非常適合用于電機控制子系統。
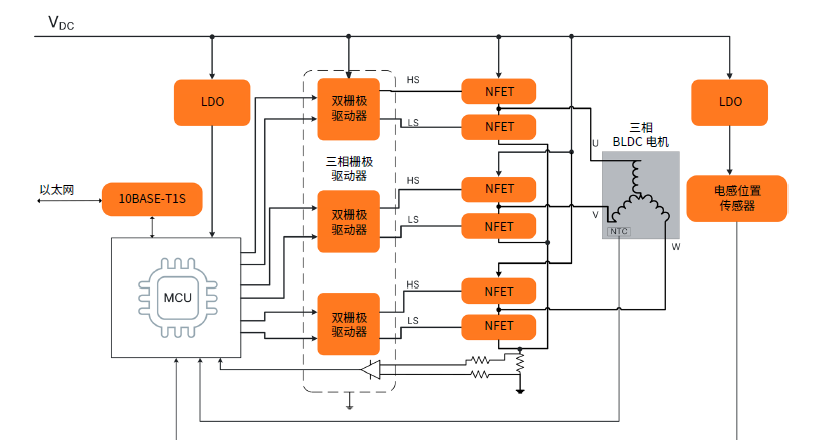
圖2- 驅動BLDC電機需要多個元器件協同工作
MOSFET用作開關為電機繞組供電。安森美提供了一系列中壓(MV)MOSFET 產品組合,包括最新的PowerTrench T10 MOSFET,是電機應用的理想之選。MOSFET還可用于AMR內的一般功率應用。
圖3- PowerTrenchT10 MOSFET 的優勢
與硅MOSFET相比,碳化硅(SiC)MOSFET 具有更高的熱導率和十倍的擊穿電場強度。這使得碳化硅元件能夠在相同材料厚度下承受更高的電壓。當 AMR(例如自動叉車)變得越來越大時,電池電壓也會隨之升高,而基于SiC的系統則可提供更好的性能和更高的效率。
SiCMOSFET 的另一個優勢是能夠在更高溫度下工作,從而簡化了散熱器設計。更高的工作頻率可減小磁性元件的尺寸(和成本),從而縮小子系統的尺寸,有助于擴大AMR的工作范圍。
電力輸送不僅對電機控制至關重要。系統還需要一個外部充電器,該充電器需要盡可能快且高效地為電池充電。AMR中的DC-DC電源樹使用開關模式電源(SMPS)和線性穩壓器(LDO)來供應邏輯和低壓電平。效率固然重要,但在整個電源架構中部署適當的保護措施也同樣重要。安森美提供了一系列適用于AMR應用的電子保險絲(eFuse)和SmartFET解決方案。
通信對AMR至關重要,既包括AMR本身內部的通信,也包括與配套設施的外部通信,還可能包括與其他AMR的通信。為 AMR選擇通信技術時需要考慮的參數包括其工作范圍、數據傳輸速率、功耗和安全性。在內部通信方面,長期以來使用了許多協議,包括CAN、LIN、RS-485和RS232。以太網 10BASE-T1S(如安森美的NCN26010)集簡便性和高性能于一身,因此越來越受歡迎。它提供通過單根非屏蔽雙絞線收發數據所需的所有物理層功能。與主控 MCU的通信通過OPEN聯盟MAC-PHY串行外設接口(SPI)協議進行。
無論是發送路由或配置信息以及報告位置和進度,還是用于實時定位服務(RTLS),外部通信對于AMR來說也是必不可少的。安森美基于BluetoothLE 5.2 無線MCU的RSL15超低功耗ArmCortex-M33 處理器是利用到達角(AoA)和出發角(AoD)功能實現實時定位系統(RTLS)的理想選擇,它還可用于連接智能設備。RSL15內置電源管理、寬電源電壓范圍、靈活的GPIO和時鐘電路以及豐富的外設,為AMR設計人員提供了最大的設計靈活性。
照明子系統用于向周圍的人員和其他AMR傳達AMR的狀態、狀況和意圖。選擇AMR照明技術時需要考慮的性能特性和參數包括亮度、色溫和功耗。LED控制器和驅動器監控流經LED的電流,并使LED發出特定強度和波長的光。LED驅動電路使用高壓側和低壓側功率MOSFET來導通和關斷LED電流,同時防止過壓和過流情況,并確保LED驅動電路的穩定性。
對AMR解決方案的支持
選擇一家解決方案提供商可能是一個有風險的決定,但他們擁有一套全面的產品解決方案。同樣重要的是在整個設計過程中提供的支持,以及在需要的時間和地點提供產品的能力。
作為一家擁有豐富行業經驗的老牌供應商,安森美能夠提供系統級應用支持。我們的全球銷售和技術團隊網絡可以不受地區、時區和語言的限制,提供一線支持。
除了現場支持,用戶還可以訪問我們的在線技術支持中心。安森美社區論壇是一個在線開發者社區,在這里,安森美產品的資深用戶可以分享他們關于產品和應用的豐富知識。用戶可以通過一些特定主題的產品論壇區域訪問該論壇,與業內同行互動,提出或回答問題。幫助庫也是了解常見問題 (FAQ)和答案的好地方。對于喜歡更多互動的用戶,由AI驅動的聊天機器人可以在幾秒鐘內為您提供答案。
安森美提供了一系列廣泛的免費自助服務工具,包括交互式框圖、ProductRecommendation Tools+TM產品推薦工具和大量評估板/套件,以促進快速原型開發。電力電子設計人員會發現這些仿真工具非常有用。ElitePower Simulator仿真工具和自助式 PLECS模型生成工具不僅可以通過對實際元器件性能建模以提高準確性,還能加快產品上市時間。
當然,上述一切只有在產品設計完成并投入生產后才有價值。安森美具備內外部雙重制造能力,這增加了供應鏈的韌性并提升了供應保障。
結語
AMR是一種高效、可靠的運送包裹和執行其他物流任務的方式,因此越來越受歡迎。然而,完全自主行駛需要高度的復雜性和安全性,這一點與汽車并無二致。
也許最大的設計挑戰不在于AMR中的各種子系統,而在于這些子系統的集成,特別是如果這些子系統來自不同的供應商,其兼容性很可能是一個挑戰。
作為一家解決方案供應商,安森美的獨特之處在于可以為AMR的設計提供一整套極其先進的產品,以及完善的支持生態系統,包括支持人員、工具、文檔、在線論壇等,并以垂直整合的彈性制造能力為后盾。
-
MOSFET
+關注
關注
150文章
8287瀏覽量
218629 -
自動駕駛
+關注
關注
788文章
14209瀏覽量
169607 -
自主移動機器人
+關注
關注
2文章
45瀏覽量
11817
原文標題:自主移動機器人設計指南,看完秒懂
文章出處:【微信號:onsemi-china,微信公眾號:安森美】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄






 工商網監
工商網監
評論