") 10種室內(nèi)定位技術(shù)原理深度解析
10種室內(nèi)定位技術(shù)原理深度解析
------ 【導(dǎo)讀】------
人類為了不讓自己迷失在茫茫大自然中,先后發(fā)明羅盤、指南針等工具,衛(wèi)星定位的問世,解決了“我在哪里”的問題。在高度城市化的今天,室內(nèi)空間越來越龐大復(fù)雜。人類戰(zhàn)勝了大自然,卻在自己構(gòu)筑的鋼筋水泥中迷了路。
東晉高僧法顯西行求法乘船回國時(shí)寫道:大海彌漫無邊,不識(shí)東西,唯望日、月、星宿而進(jìn)。大意就是說,大海遼闊無邊,分不清東西南北,只能看星星,盼月亮來進(jìn)行定位。
1
起源
人類為了不讓自己迷失在茫茫大自然中,先后發(fā)明羅盤、指南針等工具,衛(wèi)星定位的問世,解決了“我在哪里”的問題。在高度城市化的今天,室內(nèi)空間越來越龐大復(fù)雜。人類戰(zhàn)勝了大自然,卻在自己構(gòu)筑的鋼筋水泥中迷了路。
在醫(yī)院,即使有樓層分布圖以及引導(dǎo)標(biāo)志,但看病的大部分時(shí)間仍然會(huì)浪費(fèi)在尋找科室上。在停車場(chǎng),找不著停車位而四處亂轉(zhuǎn)的人也比比皆是。
在越來越迫切的需求下,近年室內(nèi)定位引起了高度的關(guān)注。
室內(nèi)定位顧名思義就是在室內(nèi)環(huán)境中實(shí)現(xiàn)定位。其意義,諾基亞在多年前闡述他們?yōu)槭裁匆鍪覂?nèi)定位時(shí),把問題說得很明白了。

數(shù)據(jù)來源:諾基亞
衛(wèi)星無法在室內(nèi)定位,人們大部分的時(shí)間又在室內(nèi)度過,而相關(guān)服務(wù)并未普及,可以說室內(nèi)定位隱藏著巨大商機(jī)。
商業(yè)應(yīng)用中,根據(jù)不同的應(yīng)用場(chǎng)景,室內(nèi)定位技術(shù)又分消費(fèi)級(jí)和工業(yè)級(jí)。
消費(fèi)市場(chǎng)應(yīng)用有:商場(chǎng)導(dǎo)購、停車場(chǎng)反向?qū)ぼ嚒⒓胰朔雷呱⒌取?duì)定位精度要求不高,1m的精度已經(jīng)可以滿足大多數(shù)應(yīng)用,不過它要求系統(tǒng)兼容現(xiàn)已普及的移動(dòng)智能終端。
企業(yè)市場(chǎng)應(yīng)用有:人流監(jiān)控和分析、智能制造、緊急救援和人員資產(chǎn)管理等。工業(yè)級(jí)技術(shù)的定位精度要求更高,要區(qū)分操作對(duì)象、人群中的個(gè)人等,與專用標(biāo)簽和傳感器配套使用,一般不考慮與現(xiàn)有智能終端的兼容性。
2
技術(shù)門派
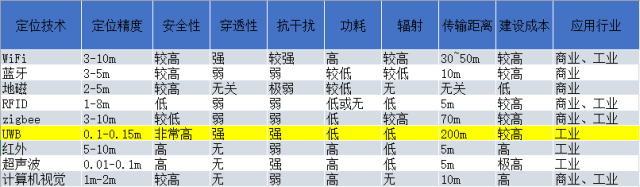
與室外衛(wèi)星定位一統(tǒng)天下的情況不一樣,室內(nèi)定位各種技術(shù)呈現(xiàn)出百花齊放的場(chǎng)景。

室內(nèi)定位百花齊放
室內(nèi)定位的商業(yè)價(jià)值跟精度成正比。當(dāng)精度是3-5米的時(shí)候,能判定你是站在7-11便利店門口還是杰克瓊斯門口。當(dāng)精度是1米的時(shí)候,則能判定你是站在可口可樂的貨架前還是杜蕾斯的貨架前。
目前,室內(nèi)定位常用的定位方法,從原理上來說,主要分為:鄰近探測(cè)法、質(zhì)心法、極點(diǎn)法、多邊定位法、指紋法和航位推算法。
主要室內(nèi)定位方法對(duì)比
|
定位方法 |
描述 |
應(yīng)用案例 |
特點(diǎn) |
|
鄰近探測(cè)法 |
通過一些有范圍限制的物理信號(hào)的接收,從而判斷移動(dòng)設(shè)備是否出現(xiàn)在某一個(gè)發(fā)射點(diǎn)附近。 |
基站定位 |
操作簡(jiǎn)單,精度不高,依賴參考點(diǎn)分布密度 |
|
質(zhì)心定位法 |
根據(jù)移動(dòng)設(shè)備可接收信號(hào)范圍內(nèi)所有已知的信標(biāo)位置,計(jì)算其質(zhì)心坐標(biāo)作為移動(dòng)設(shè)備的坐標(biāo) |
基站定位 |
精度不高,依賴參考點(diǎn)分布密度 |
|
多邊定位法 |
通過測(cè)量待測(cè)目標(biāo)到已知參考點(diǎn)之間的距離,從而確定待測(cè)目標(biāo)的位置。 |
超聲波 |
精度高,應(yīng)用廣 |
|
極點(diǎn)法 |
測(cè)量相對(duì)某一已知參考點(diǎn)的距離和角度從而確定待測(cè)點(diǎn)的位置 |
激光掃描 |
測(cè)量簡(jiǎn)單,精度高,應(yīng)用不廣 |
|
指紋定位 |
在定位空間中建立指紋數(shù)據(jù)庫,通過將實(shí)際信息與數(shù)據(jù)庫中的參數(shù)進(jìn)行對(duì)比來實(shí)現(xiàn)定位 |
地磁 |
精度高,前期工作大,不適合環(huán)境變化區(qū)域 |
|
航位推算法 |
根據(jù)預(yù)先確定的位置、估計(jì)或已知的速度和時(shí)間來估計(jì)當(dāng)前的位置 |
慣性導(dǎo)航 |
數(shù)據(jù)穩(wěn)定,無依賴,誤差隨時(shí)間積累 |
|
全球物聯(lián)網(wǎng)觀察制表 |
|||
各種原理各有優(yōu)劣,在不同應(yīng)用場(chǎng)景、不同預(yù)算要求下,也可將不同的原理組合使用。主流技術(shù)有以下幾種:
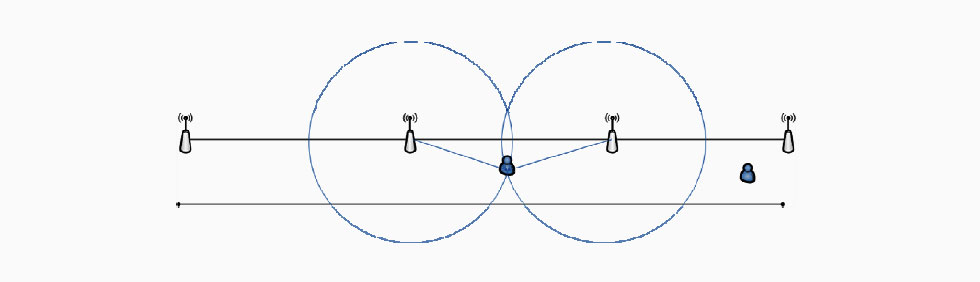
WiFi定位技術(shù)
目前WiFi是相對(duì)成熟且應(yīng)用較多的技術(shù),這幾年有不少公司投入到了這個(gè)領(lǐng)域。WiFi室內(nèi)定位技術(shù)主要有兩種。
WiFi定位一般采用“近鄰法”判斷,即最靠近哪個(gè)熱點(diǎn)或基站,即認(rèn)為處在什么位置,如附近有多個(gè)信源,則可以通過交叉定位(三邊定位),提高定位精度。
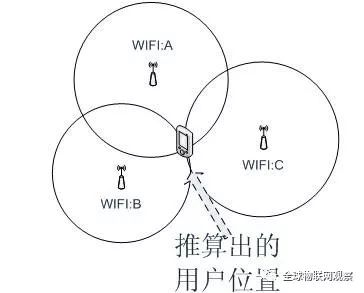
由于WiFi已普及,因此不需要再鋪設(shè)專門的設(shè)備用于定位。用戶在使用智能手機(jī)時(shí)開啟過Wi-Fi、移動(dòng)蜂窩網(wǎng)絡(luò),就可能成為數(shù)據(jù)源。該技術(shù)具有便于擴(kuò)展、可自動(dòng)更新數(shù)據(jù)、成本低的優(yōu)勢(shì),因此最先實(shí)現(xiàn)了規(guī)模化。
不過,WiFi熱點(diǎn)受到周圍環(huán)境的影響會(huì)比較大,精度較低。為了做得準(zhǔn)一點(diǎn)有公司就做了WiFi指紋采集,事先記錄巨量的確定位置點(diǎn)的信號(hào)強(qiáng)度,通過用新加入的設(shè)備的信號(hào)強(qiáng)度對(duì)比擁有巨量數(shù)據(jù)的數(shù)據(jù)庫,來確定位置。
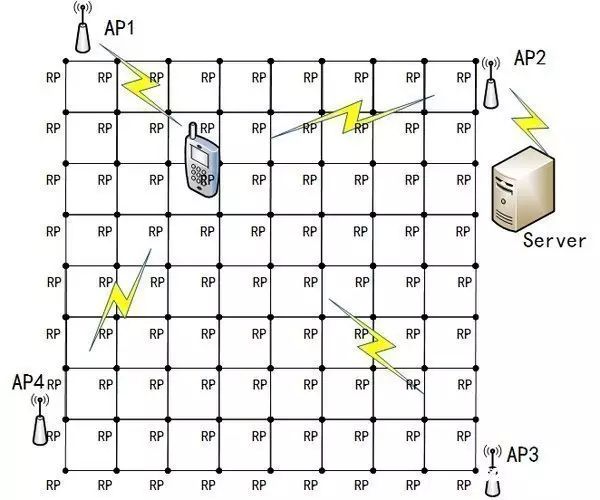
由于采集工作需要大量的人員來進(jìn)行,并且要定期進(jìn)行維護(hù),技術(shù)難以擴(kuò)展,很少有公司能把國內(nèi)的這么多商場(chǎng)定期的更新指紋數(shù)據(jù)。
WiFi定位可以實(shí)現(xiàn)復(fù)雜的大范圍定位,但精度只能達(dá)到2米左右,無法做到精準(zhǔn)定位。因此適用于對(duì)人或者車的定位導(dǎo)航,可以于醫(yī)療機(jī)構(gòu)、主題公園、工廠、商場(chǎng)等各種需要定位導(dǎo)航的場(chǎng)合。
代表公司有:WIFISLAM、Sensewhere、圖聚智能
另,地磁定位技術(shù)是利用室內(nèi)不同位置的地磁場(chǎng)差異,來確定室內(nèi)位置。與WiFi指紋類似,故不再作介紹。
慣性導(dǎo)航技術(shù)
這是一種純客戶端的技術(shù),主要利用終端慣性傳感器采集的運(yùn)動(dòng)數(shù)據(jù),如加速度傳感器、陀螺儀等測(cè)量物體的速度、方向、加速度等信息,基于航位推測(cè)法,經(jīng)過各種運(yùn)算得到物體的位置信息。
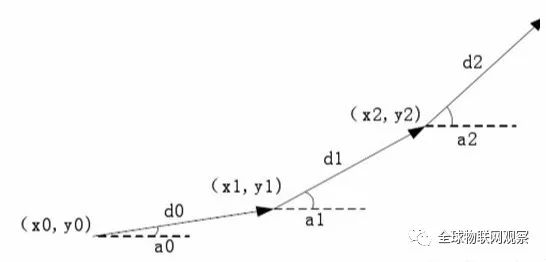
隨著行走時(shí)間增加,慣性導(dǎo)航定位的誤差也在不斷累積。需要外界更高精度的數(shù)據(jù)源對(duì)其進(jìn)行校準(zhǔn)。所以現(xiàn)在慣性導(dǎo)航一般和WiFi指紋結(jié)合在一起, 每過一段時(shí)間通過WiFi請(qǐng)求室內(nèi)位置,以此來對(duì)MEMS產(chǎn)生的誤差進(jìn)行修正。該技術(shù)目前的商用得也比較成熟,在掃地機(jī)器人中得到廣泛應(yīng)用。
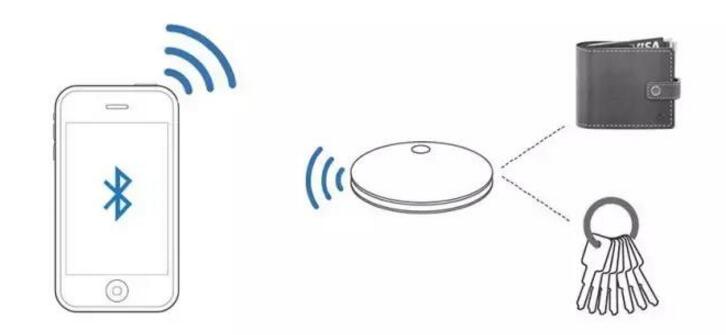
藍(lán)牙信標(biāo)技術(shù)
藍(lán)牙信標(biāo)技術(shù)目前部署的也比較多,也是相對(duì)比較成熟的技術(shù)。藍(lán)牙跟WiFi的區(qū)別不是太大,精度會(huì)比WiFi稍微高一點(diǎn)。
該技術(shù)最先由諾基亞最先發(fā)起,但影響不大。2013年,蘋果發(fā)布了基于藍(lán)牙4.0低功耗協(xié)議(BLE)的iBeacon協(xié)議,主要針對(duì)零售業(yè)應(yīng)用,引起廣泛關(guān)注。
iBeacon藍(lán)牙信標(biāo)技術(shù)的正常運(yùn)作,需要藍(lán)牙信標(biāo)硬件、智能終端上的應(yīng)用、云端上的應(yīng)用后臺(tái)協(xié)同工作。

信標(biāo)通過藍(lán)牙向周圍廣播自身的ID,終端上的應(yīng)用在獲得附近信標(biāo)的ID后會(huì)采取相應(yīng)行動(dòng),如從云端后臺(tái)拉取此ID對(duì)應(yīng)的位置信息、營銷資訊等。終端可以測(cè)量其所在處的接收信號(hào)強(qiáng)度,以此估算與信標(biāo)間的距離。因此,只要終端附近有三個(gè)或以上信標(biāo),就可以用三邊定位方法計(jì)算出終端的位置。
在蘋果強(qiáng)大的號(hào)召力影響下,大量創(chuàng)業(yè)公司爭(zhēng)先恐后涌入iBeacon應(yīng)用的開發(fā)和推廣。目前主要問題在于beacon電池更換,如果一個(gè)廠家部署了幾萬個(gè)beacon裝置,一年之后或者電池耗盡之后的電池更換工作量是很繁重的。
另,ZigBee技術(shù)和藍(lán)牙類似,故不再作介紹。
RFID技術(shù)
RFID定位的基本原理是,通過一組固定的閱讀器讀取目標(biāo)RFID標(biāo)簽的特征信息(如身份ID、接收信號(hào)強(qiáng)度等),同樣可以采用近鄰法、多邊定位法、接收信號(hào)強(qiáng)度等方法確定標(biāo)簽所在位置。
射頻識(shí)別室內(nèi)定位技術(shù)作用距離很近,但它可以在幾毫秒內(nèi)得到厘米級(jí)定位精度的信息,且由于電磁場(chǎng)非視距等優(yōu)點(diǎn),傳輸范圍很大,而且標(biāo)識(shí)的體積比較小,造價(jià)比較低。但其不具有通信能力,抗干擾能力較差,不便于整合到其他系統(tǒng)之中,且用戶的安全隱私保障和國際標(biāo)準(zhǔn)化都不夠完善。
目前有大量成熟的商用定位方案基于RFID技術(shù),廣泛應(yīng)用于緊急救援、資產(chǎn)管理、人員追蹤等領(lǐng)域。
紅外技術(shù)
紅外定位主要有兩種具體實(shí)現(xiàn)方法,一種是將定位對(duì)象附上一個(gè)會(huì)發(fā)射紅外線的電子標(biāo)簽,通過室內(nèi)安放的多個(gè)紅外傳感器測(cè)量信號(hào)源的距離或角度,從而計(jì)算出對(duì)象所在的位置。
這種方法在空曠的室內(nèi)容易實(shí)現(xiàn)較高精度,可實(shí)現(xiàn)對(duì)紅外輻射源的被動(dòng)定位,但紅外很容易被障礙物遮擋,傳輸距離也不長(zhǎng),因此需要大量密集部署傳感器,造成較高的硬件和施工成本。此外紅外易受熱源、燈光等干擾,造成定位精度和準(zhǔn)確度下降。
該技術(shù)目前主要用于軍事上對(duì)飛行器、坦克、導(dǎo)彈等紅外輻射源的被動(dòng)定位,此外也用于室內(nèi)自走機(jī)器人的位置定位。
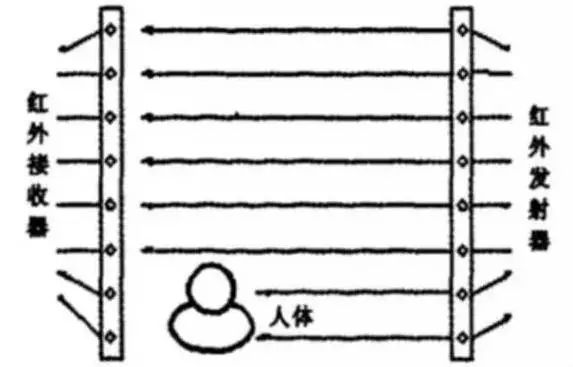
另一種紅外定位的方法是紅外織網(wǎng),即通過多對(duì)發(fā)射器和接收器織成的紅外線網(wǎng)覆蓋待測(cè)空間,直接對(duì)運(yùn)動(dòng)目標(biāo)進(jìn)行定位。
這種方式的優(yōu)勢(shì)在于不需要定位對(duì)象攜帶任何終端或標(biāo)簽,隱蔽性強(qiáng),常用于安防領(lǐng)域。劣勢(shì)在于要實(shí)現(xiàn)精度較高的定位需要部署大量紅外接收和發(fā)射器,成本非常高,因此只有高等級(jí)的安防才會(huì)采用此技術(shù)。
超聲波技術(shù)
超聲波定位主要采用反射式測(cè)距法,通過多邊定位等方法確定物體位置,系統(tǒng)由一個(gè)主測(cè)距器和若干接收器組成,主測(cè)距儀可放置在待測(cè)目標(biāo)上,接收器固定于室內(nèi)環(huán)境中。定位時(shí),向接收器發(fā)射同頻率的信號(hào),接收器接收后又反射傳輸給主測(cè)距器,根據(jù)回波和發(fā)射波的時(shí)間差計(jì)算出距離,從而確定位置。
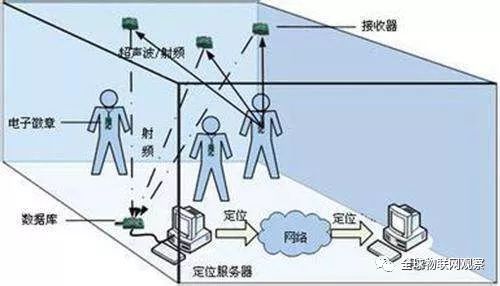
超聲波定位整體定位精度較高,結(jié)構(gòu)簡(jiǎn)單,但超聲波受多徑效應(yīng)和非視距傳播影響很大,且超聲波頻率受多普勒效應(yīng)和溫度影響,同時(shí)也需要大量基礎(chǔ)硬件設(shè)施,成本較高。
代表公司:Shopkick
超寬帶技術(shù)
超寬帶(UWB)定位技術(shù)利用事先布置好的已知位置的錨節(jié)點(diǎn)和橋節(jié)點(diǎn),與新加入的盲節(jié)點(diǎn)進(jìn)行通訊,并利用三角定位或者“指紋”定位方式來確定位置。
從技術(shù)上看,無論是從定位精度、安全性、抗干擾、功耗等角度來分析,UWB無疑是最理想的工業(yè)定位技術(shù)之一。
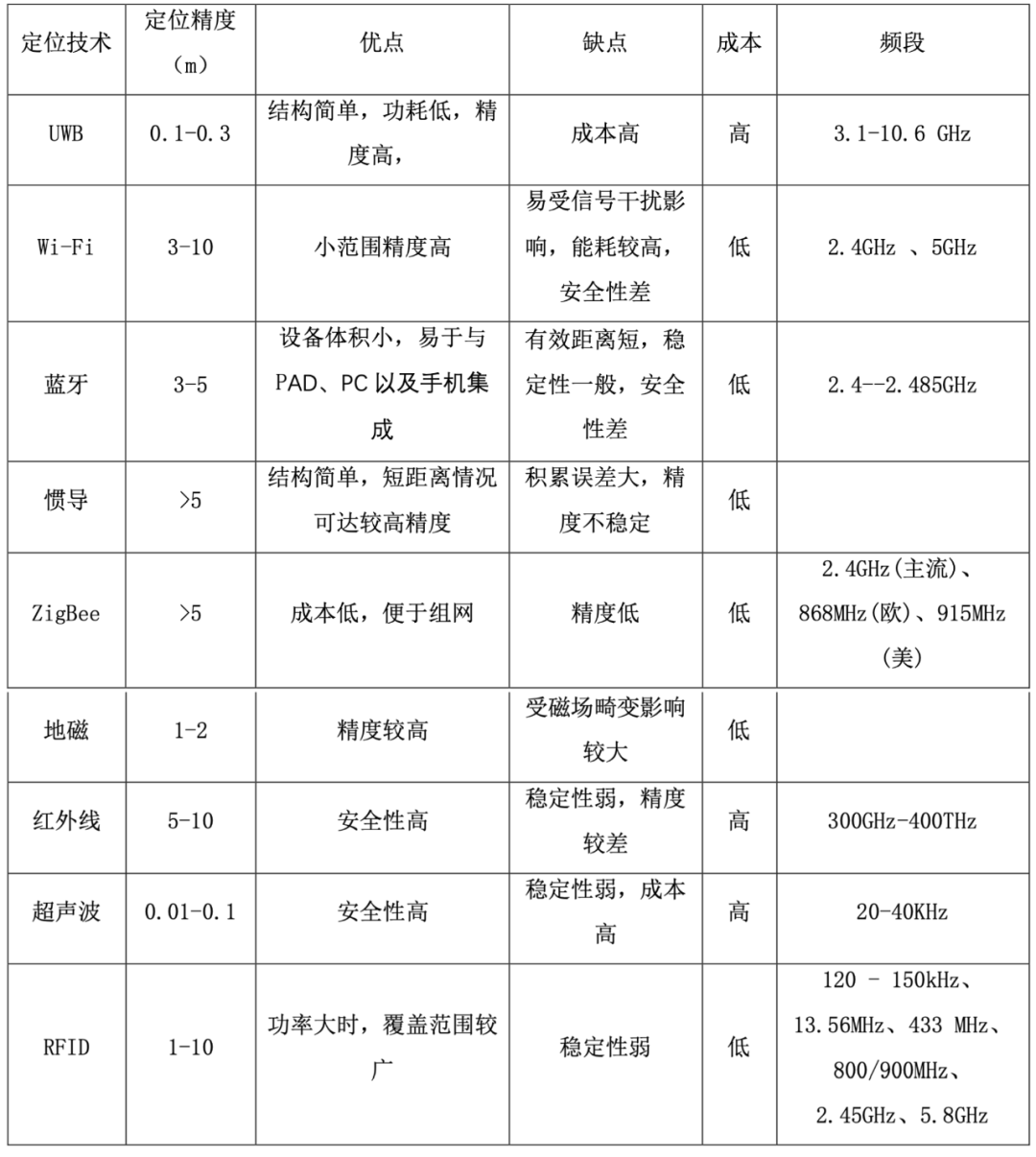
UWB其他幾種技術(shù)的綜合比較:
不過UWB的劣勢(shì)也很突出,一方面難以實(shí)現(xiàn)大范圍室內(nèi)覆蓋,另一方面系統(tǒng)建設(shè)成本遠(yuǎn)高于RFID、藍(lán)牙信標(biāo)等技術(shù),這也限制了該技術(shù)的推廣和普及。
代表公司:Ubisense、中海達(dá)子公司聯(lián)睿電子、清華系公司清研訊科。
LED可見光技術(shù)
可見光是一個(gè)新興領(lǐng)域,通過對(duì)每個(gè)LED燈進(jìn)行編碼,將ID調(diào)制在燈光上,燈會(huì)不斷發(fā)射自己的ID,通過利用手機(jī)的前置攝像頭來識(shí)別這些編碼。利用所獲取的識(shí)別信息在地圖數(shù)據(jù)庫中確定對(duì)應(yīng)的位置信息,完成定位。
根據(jù)燈光到達(dá)的角度進(jìn)一步細(xì)化定位的結(jié)果,高通公司做到了厘米級(jí)定位精度。由于不需要額外部署基礎(chǔ)設(shè)施,終端數(shù)量的擴(kuò)大對(duì)性能沒有任何的影響,并且可以達(dá)到一個(gè)非常高的精度,該技術(shù)被高通公司所看好。
目前,可見光技術(shù)在北美有很多商場(chǎng)已經(jīng)在部署。用戶下載應(yīng)用后,到達(dá)商場(chǎng)里的某一個(gè)貨架,通過檢測(cè)貨架周圍的燈光即可知曉具體位置,商家在通過這樣的方法向消費(fèi)者推動(dòng)商品的折扣等信息。
代表企業(yè):華策光通信
3
技術(shù)融合是趨勢(shì)
室內(nèi)定位技術(shù)處在不斷的發(fā)展中,是當(dāng)前熱門研究領(lǐng)域,有著良好的應(yīng)用前景。不過,當(dāng)前還缺乏特別大規(guī)模的商用案例。行業(yè)主要存在以下難點(diǎn):
1. 室內(nèi)環(huán)境復(fù)雜
室內(nèi)環(huán)境布局復(fù)雜多變,障礙物很多,包括家具、房間和行人等。同時(shí)室內(nèi)環(huán)境干擾源多,燈光、溫度、聲音等干擾源都會(huì)對(duì)定位造成一定影響。
各技術(shù)綜合比較
|
技術(shù) |
成本 |
優(yōu)點(diǎn) |
劣勢(shì) |
|
WiFi |
低 |
網(wǎng)絡(luò)廣泛、通信能力強(qiáng) |
易受環(huán)境干擾 |
|
RFID |
中 |
成本不高、精度高 |
標(biāo)識(shí)沒有通信能力、距離短 |
|
藍(lán)牙 |
低 |
設(shè)備體積小、易集成、易普及 |
傳播距離短、穩(wěn)定性差 |
|
慣性 |
低 |
不依賴外部環(huán)境 |
存在累計(jì)誤差、不適合長(zhǎng)期使用 |
|
紅外線 |
高 |
精度高 |
直線視距、傳輸距離短、易干擾 |
|
超聲波 |
高 |
精度高 |
受環(huán)境溫度影響、傳輸距離短 |
|
UWB |
高 |
精度高、穿透性強(qiáng) |
成本高、覆蓋范圍小 |
|
可見光 |
高 |
通訊速率高、抗干擾能力強(qiáng) |
覆蓋范圍小 |
|
全球物聯(lián)網(wǎng)觀察制表 |
|||
2. 缺乏統(tǒng)一的規(guī)范
室內(nèi)定位技術(shù)眾多,各種技術(shù)都有自己的局限性,彼此間又在一定程度上存在互相競(jìng)爭(zhēng)。市場(chǎng)相對(duì)混亂,極大地影響了室內(nèi)定位行業(yè)的發(fā)展。如室外定位衛(wèi)星定位成為事實(shí)上的標(biāo)準(zhǔn),目前沒有其他技術(shù)可以和衛(wèi)星定位進(jìn)行競(jìng)爭(zhēng)。
3. 精度與成本難以兼顧
目前的高精度室內(nèi)定位技術(shù)均需要比較昂貴的額外輔助設(shè)備或前期大量的人工處理,這些都大大制約了技術(shù)的推廣普及。低成本的定位技術(shù)則在定位精度上需要提高。在提供高精度定位的基礎(chǔ)上降低成本也是室內(nèi)定位的一個(gè)方向。
天下大勢(shì),分久必合,合久必分。目前,室內(nèi)定位技術(shù)實(shí)在太多,已嚴(yán)重阻礙行業(yè)發(fā)展,未來的趨勢(shì)一定是多種技術(shù)融合使用,實(shí)現(xiàn)優(yōu)勢(shì)互補(bǔ),以面對(duì)復(fù)雜環(huán)境。其中成本越低、兼容性越好、精度越高的技術(shù)越容易普及。
室內(nèi)定位相關(guān)文章:
室內(nèi)定位技術(shù)有哪些_七大室內(nèi)定位技術(shù)詳解
-
諾基亞
+關(guān)注
關(guān)注
9文章
3195瀏覽量
84525 -
物聯(lián)網(wǎng)
+關(guān)注
關(guān)注
2927文章
45869瀏覽量
387942 -
室內(nèi)定位
+關(guān)注
關(guān)注
30文章
307瀏覽量
36942
原文標(biāo)題:干貨!物聯(lián)網(wǎng)十大室內(nèi)定位技術(shù)原理解析
文章出處:【微信號(hào):qd053267722128,微信公眾號(hào):物聯(lián)網(wǎng)水產(chǎn)養(yǎng)殖監(jiān)控】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
隨室內(nèi)定位需求的增大,室內(nèi)定位技術(shù)的不斷發(fā)展應(yīng)用
室內(nèi)定位市場(chǎng)深度剖析, UWB定位技術(shù)或?qū)⒊蔀橹髁?/a>
室內(nèi)定位技術(shù)總述
室內(nèi)定位技術(shù)的應(yīng)用
UWB超寬帶室內(nèi)定位技術(shù)
常見的室內(nèi)定位方案
室內(nèi)定位技術(shù)應(yīng)用
為什么UWB定位技術(shù)可用于室內(nèi)定位?
基于UWB技術(shù)的室內(nèi)定位方法簡(jiǎn)述
幾種主流室內(nèi)定位技術(shù)比較,誰更厲害?
深度解析室內(nèi)定位和室外定位技術(shù)
室內(nèi)定位技術(shù)有哪些_七大室內(nèi)定位技術(shù)詳解
UWB室內(nèi)定位系統(tǒng)維度分析
九種室內(nèi)定位技術(shù)概覽 室內(nèi)定位技術(shù)的原理和應(yīng)用場(chǎng)景





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論