") 電動(dòng)夾爪的運(yùn)動(dòng)控制方案
電動(dòng)夾爪的運(yùn)動(dòng)控制方案
夾爪的應(yīng)用是機(jī)器人、機(jī)械手臂末端執(zhí)行器,其穩(wěn)定、高效、精準(zhǔn)、科技化的特點(diǎn),有效提高了各行各業(yè)生產(chǎn)效率,解決工業(yè)化精密運(yùn)動(dòng)控制的難題。電動(dòng)夾爪通過電機(jī)、傳動(dòng)系統(tǒng)、減速器及夾爪控制系統(tǒng)組成,兩端的夾爪可根據(jù)不同的夾持力,連續(xù)閉合和張開實(shí)際物體的夾取運(yùn)動(dòng)。
夾爪的原理
夾爪的開合運(yùn)動(dòng)的動(dòng)力源,通常采用的是步進(jìn)伺服、伺服電機(jī)和直流無刷電機(jī),具有高響應(yīng)的優(yōu)勢(shì)。其原理是通過控制器控制電機(jī)的傳動(dòng)、轉(zhuǎn)速及方向,讓夾爪夾取或者松開操作。可通過夾爪的位置、夾取速度及夾取的力度來實(shí)現(xiàn)夾爪的運(yùn)動(dòng)。
伺服電動(dòng)夾爪控制
采用伺服電機(jī)傳動(dòng)的夾爪,具有高精度的優(yōu)勢(shì)。
1、位置控制
通過對(duì)伺服電機(jī)電流的位置閉環(huán)控制,控制夾爪在指定的位置上夾住物體。位置模式的閉環(huán),可通過傳感器檢測(cè)夾爪的位置,然后計(jì)算出誤差值,再發(fā)送信號(hào)讓電機(jī)運(yùn)動(dòng)到精確的位置。
2、速度控制
通過對(duì)電機(jī)的轉(zhuǎn)速來精確控制。一般是在特別的運(yùn)行場(chǎng)合,已知物體的大小規(guī)格并且是一致的情況下,通過閉環(huán)控制速檢測(cè)反饋,或開閉控制預(yù)設(shè)信號(hào)的方式,實(shí)現(xiàn)控制夾爪的運(yùn)動(dòng)速度。
3、扭矩(力矩)控制
通過夾取力度、夾取物體的力來控制夾爪的運(yùn)動(dòng)。閉環(huán)控制時(shí)通過傳感器檢測(cè),或者開環(huán)控制下預(yù)設(shè)夾持力信號(hào),實(shí)現(xiàn)夾取運(yùn)動(dòng)。
應(yīng)用領(lǐng)域
1、工業(yè)自動(dòng)化:工業(yè)自動(dòng)化流水線生產(chǎn)多軸運(yùn)動(dòng)過程中,機(jī)械手臂末端夾爪的快速夾取及放置物體,提高效率及產(chǎn)能。
2、機(jī)器人:人工智能機(jī)器人模擬人工手部夾取物體運(yùn)動(dòng),實(shí)現(xiàn)機(jī)器人仿人工自動(dòng)化操作。
3、醫(yī)療領(lǐng)域:移液站移液設(shè)備,夾取液體運(yùn)動(dòng),處理液體樣品的精密運(yùn)動(dòng)。也常用在實(shí)驗(yàn)室、科研測(cè)試中。
4、大型物流倉儲(chǔ):快速搬動(dòng)大型貨物。
TMC精密運(yùn)動(dòng)控制方案
我們有整套電機(jī)結(jié)構(gòu)和驅(qū)動(dòng)模塊調(diào)試效果。(如下視頻)
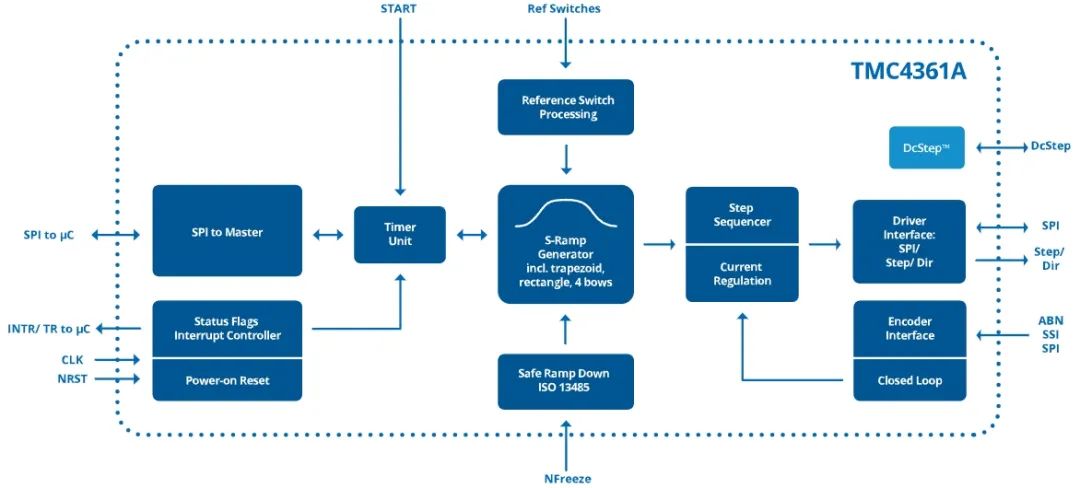
1、步進(jìn)伺服方案:TMC4361是一種步進(jìn)電機(jī)伺服控制器,內(nèi)置閉環(huán)算法+電流控制,可實(shí)現(xiàn)電機(jī)的力矩環(huán)、速度環(huán)、位置環(huán)控制。步進(jìn)伺服具備成本低、扭矩高等特點(diǎn),也常用于夾爪的應(yīng)用中。該驅(qū)動(dòng)器內(nèi)置斜坡(曲線加減速)發(fā)生器,具有S形斜坡、SixPoint (六點(diǎn)斜坡)運(yùn)動(dòng)控制,允許運(yùn)動(dòng)過程中切換,避免電機(jī)加速過程中抖動(dòng)、損耗電機(jī)等。此外,TMC4361A 提供 SPI 和 Step/Dir,以及用于閉環(huán)操作的編碼器接口。ChopSync(一種斬波模式),解決步進(jìn)伺服低速運(yùn)動(dòng)的低頻振動(dòng)的問題。
Trinamic步進(jìn)電機(jī)閉環(huán)驅(qū)動(dòng)高性價(jià)比方案的選擇:
01
TMC4361+TMC2130/TMC5130(小功率)
02
TMC4361+TMC2160/TMC5160/TMC2240(大功率)
2、伺服、直流無刷、空心杯及永磁同步電機(jī)方案:TMC4671是完全集成的伺服控制器,可為BLDC/PMSM和2相步進(jìn)電機(jī)驅(qū)動(dòng)以及DC電機(jī)和音圈提供磁場(chǎng)定向控制(FOC),所有控制功能均在硬件中實(shí)現(xiàn)。支持串口或者是CAN通信,通過TMCL-IDE上位機(jī)軟件進(jìn)行設(shè)定的模式。以力矩值為例,通過軟件上傳指令,如設(shè)定最小電流/電大電流,電機(jī)工作時(shí)它的電流會(huì)在這最大值與最小值之間,負(fù)載越大電流值越大,當(dāng)我們需要力控制的時(shí)候,我們可以通過編碼器反饋的值來進(jìn)行設(shè)定一個(gè)合適的值,當(dāng)外面的力達(dá)到所設(shè)定的值時(shí),就會(huì)觸發(fā)一個(gè)輸出信號(hào)。
//
目前,我們有整套電機(jī)結(jié)構(gòu)和驅(qū)動(dòng)模塊調(diào)試效果,歡迎各位工程師們前來體驗(yàn)。
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29475瀏覽量
211530 -
運(yùn)動(dòng)控制
+關(guān)注
關(guān)注
4文章
637瀏覽量
33366 -
機(jī)械手臂
+關(guān)注
關(guān)注
2文章
102瀏覽量
42068
發(fā)布評(píng)論請(qǐng)先 登錄
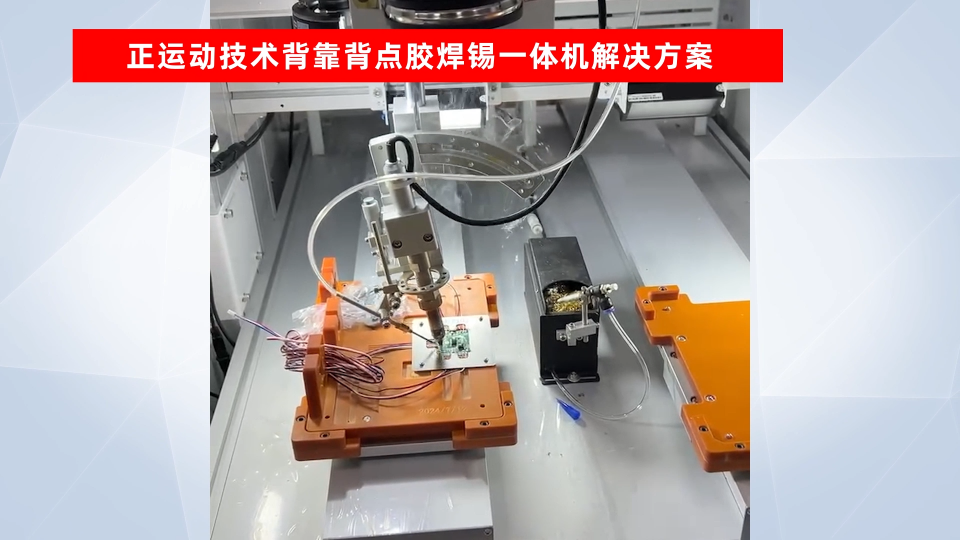
機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)在背靠背點(diǎn)膠焊錫機(jī)上的應(yīng)用#正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制器 #運(yùn)動(dòng)控制系統(tǒng)方案 #正運(yùn)動(dòng)
LabVIEW運(yùn)動(dòng)控制(二):EtherCAT運(yùn)動(dòng)控制器的多軸示教加工應(yīng)用(下)#正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制
米思米電動(dòng)夾爪:多樣型號(hào),精準(zhǔn)高效滿足您所有需求?
米思米電動(dòng)夾爪:如何以經(jīng)濟(jì)型優(yōu)勢(shì)革新生產(chǎn)效率與穩(wěn)定性?
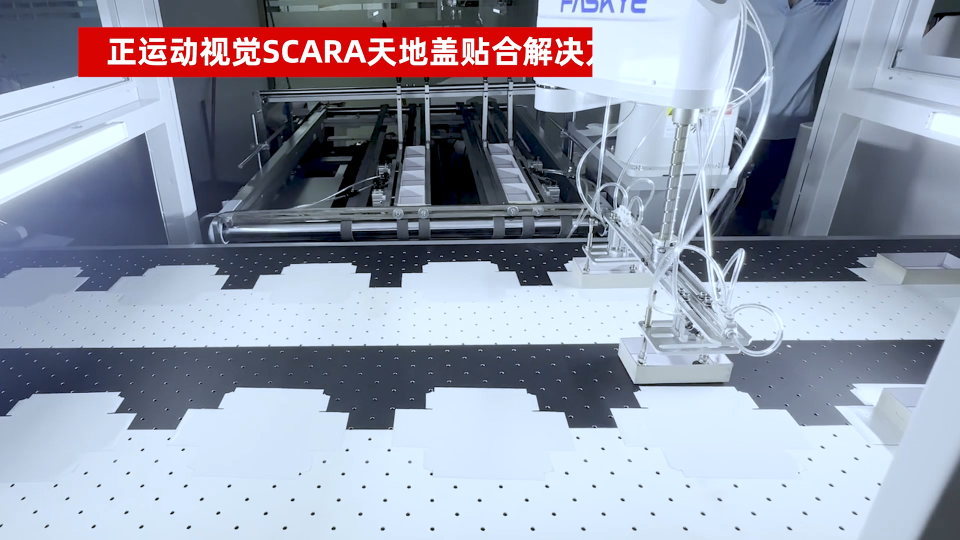
機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)在視覺SCARA天地蓋貼合的解決方案#正運(yùn)動(dòng)技術(shù) #機(jī)器視覺運(yùn)動(dòng)控制一體機(jī) #運(yùn)動(dòng)控制
【精準(zhǔn)高效 驅(qū)動(dòng)智能運(yùn)動(dòng)新時(shí)代】深入探討ADI電機(jī)運(yùn)動(dòng)控制方案

如何利用微型電動(dòng)云臺(tái)控制方案實(shí)現(xiàn)精準(zhǔn)拍攝控制?


NEPCON ASIA 2024亞洲電子展 正運(yùn)動(dòng)技術(shù)展臺(tái)直擊正運(yùn)動(dòng)攜高性能運(yùn)動(dòng)控制產(chǎn)品與應(yīng)用方案解決方案亮相
米思米全新上市的經(jīng)濟(jì)型電動(dòng)夾爪,如何解決這些問題?
電動(dòng)夾爪PK氣動(dòng)夾爪,優(yōu)勢(shì)何在?

2024深圳智博會(huì) 正運(yùn)動(dòng)技術(shù)展臺(tái)直擊 正運(yùn)動(dòng)攜高性能運(yùn)動(dòng)控制產(chǎn)品與應(yīng)用方案解決方案亮相# 運(yùn)動(dòng)控制器
什么是網(wǎng)絡(luò)運(yùn)動(dòng)控制器?運(yùn)動(dòng)控制器控制伺服電機(jī)的方式有哪些?

米思米電動(dòng)夾爪新上市,多功能、精簡(jiǎn)結(jié)構(gòu)降成本31%,高效設(shè)計(jì)組裝,一鍵切換程序,提速80%,引領(lǐng)夾爪革新。
米思米電動(dòng)夾爪:革新傳統(tǒng),提升效率與穩(wěn)定性






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論