") CVPR上的新頂流:BEV自動駕駛感知新范式
CVPR上的新頂流:BEV自動駕駛感知新范式
在高級別自動駕駛功能應(yīng)用中,車輛的智駕系統(tǒng)必須能夠解決corner case,即罕見卻又無法完全避免的極端場景。這些場景數(shù)據(jù)樣本較少,一旦模型不能有效識別,可能引發(fā)嚴重的安全事故。
前段時間,百度在Create大會上的輔助駕駛板塊發(fā)布了一個挺硬核的內(nèi)容,或許能有效解決corner case,車路一體的BEV感知方案——UniBEV。
BEV自動駕駛感知好比一個從高處統(tǒng)觀全局的“上帝視角”,將三維環(huán)境信息投影到二維平面,以俯視視角展示環(huán)境中的物體和地形。在路徑規(guī)劃、障礙物檢測、自動駕駛決策等方面,BEV感知都展現(xiàn)出了其獨特的優(yōu)勢。
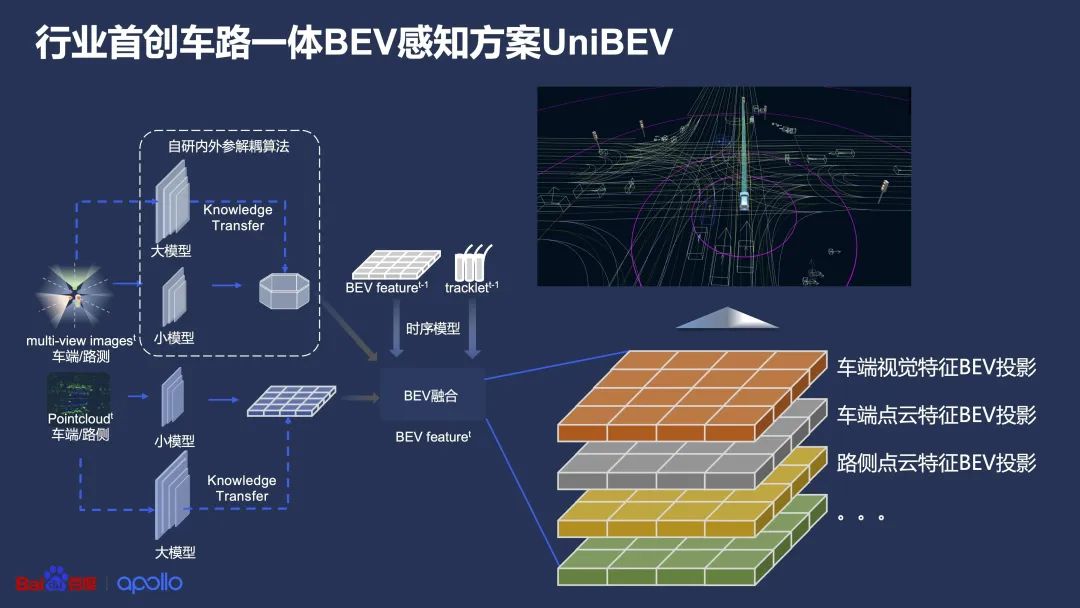
車路一體的BEV感知方案——UniBEV
路徑規(guī)劃:BEV感知可以將復(fù)雜的道路信息簡化為一系列的路徑點,使得路徑規(guī)劃更加簡單、準確。
障礙物檢測:BEV感知能夠清晰地展示出車輛周圍的障礙物,包括車輛、行人、道路標志等,使得障礙物的檢測和識別更加準確。
自動駕駛決策:BEV感知可以為自動駕駛系統(tǒng)提供全面的環(huán)境信息,幫助系統(tǒng)做出更加智能的決策。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
檢測
+關(guān)注
關(guān)注
5文章
4605瀏覽量
92532 -
自動駕駛
+關(guān)注
關(guān)注
788文章
14196瀏覽量
169515
原文標題:CVPR上的新頂流:BEV自動駕駛感知新范式
文章出處:【微信號:CVer,微信公眾號:CVer】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
新能源車軟件單元測試深度解析:自動駕駛系統(tǒng)視角
焦點是否落在目標物體上。某自動駕駛公司借此發(fā)現(xiàn)模型在夜間過度關(guān)注路燈而非行人。
? 實時性保障: ?時間感知測試框架(TAF)注入時間戳探針,監(jiān)控函數(shù)執(zhí)行耗時。例如,某路徑規(guī)劃算法因內(nèi)存泄漏導(dǎo)致響應(yīng)
發(fā)表于 05-12 15:59
感知融合如何讓自動駕駛汽車“看”世界更清晰?
自動駕駛技術(shù)被認為是未來交通領(lǐng)域的革命性變革,其目標是通過技術(shù)手段實現(xiàn)安全、高效、便捷的出行體驗。而在這一技術(shù)體系中,環(huán)境感知系統(tǒng)扮演著至關(guān)重要的角色,它不僅是自動駕駛車輛理解外部世界的“眼睛

康謀方案 | BEV感知技術(shù):多相機數(shù)據(jù)采集與高精度時間同步方案
隨著自動駕駛技術(shù)的快速發(fā)展,車輛準確感知周圍環(huán)境的能力變得至關(guān)重要。BEV Camera數(shù)據(jù)采集方案有效解決了多相機同步采集和高精度時間同步的難題,還提供了靈活的相機參數(shù)配置和高效的數(shù)據(jù)傳輸,能夠滿足
淺析基于自動駕駛的4D-bev標注技術(shù)
4D-bev標注技術(shù)是指在3D空間中以時間作為第四個維度進行標注的過程。4D-bev通常在地場景較為復(fù)雜的自動駕駛場景中使用,其可以通過精準地跟蹤和記錄動態(tài)對象的運動軌跡、姿勢變化以及速度等信息,全面理解和分析動態(tài)對象在連續(xù)的時

一文聊聊自動駕駛測試技術(shù)的挑戰(zhàn)與創(chuàng)新
隨著自動駕駛技術(shù)的飛速發(fā)展,自動駕駛測試的重要性也日益凸顯。自動駕駛測試不僅需要驗證車輛的感知、決策、控制模塊的獨立性能,還需確保系統(tǒng)在復(fù)雜場景中運行的整體可靠性。然而,

標貝科技:自動駕駛中的數(shù)據(jù)標注類別分享
自動駕駛訓(xùn)練模型的成熟和穩(wěn)定離不開感知技術(shù)的成熟和穩(wěn)定,訓(xùn)練自動駕駛感知模型需要使用大量準確真實的數(shù)據(jù)。據(jù)英特爾計算,L3+級自動駕駛每輛汽

標貝科技:自動駕駛中的數(shù)據(jù)標注類別分享
自動駕駛訓(xùn)練模型的成熟和穩(wěn)定離不開感知技術(shù)的成熟和穩(wěn)定,訓(xùn)練自動駕駛感知模型需要使用大量準確真實的數(shù)據(jù)。據(jù)英特爾計算,L3+級自動駕駛每輛汽

自動駕駛中一直說的BEV+Transformer到底是個啥?
感知、理解和預(yù)測方面表現(xiàn)得更為強大,徹底終結(jié)了2D直視圖+CNN時代。BEV+Transformer通過鳥瞰視角與Transformer模型的結(jié)合,顯著提升了自動駕駛

NVIDIA Research端到端自動駕駛模型引領(lǐng)國際挑戰(zhàn)賽
NVIDIA 在國際計算機視覺與模式識別會議(CVPR)上展示了用于自動駕駛汽車開發(fā)的加速計算和生成式 AI 的突破技術(shù)。
聊聊自動駕駛離不開的感知硬件
自動駕駛飛速發(fā)展,繞不開感知、決策和控制決策的經(jīng)典框架,而感知作為自動駕駛汽車“感官”的重要組成部分,決定了自動駕駛系統(tǒng)對環(huán)境的理解和反應(yīng)能
FPGA在自動駕駛領(lǐng)域有哪些優(yōu)勢?
領(lǐng)域的主要優(yōu)勢:
高性能與并行處理能力:
FPGA內(nèi)部包含大量的邏輯門和可配置的連接,能夠同時處理多個數(shù)據(jù)流和計算任務(wù)。這種并行處理能力使得FPGA在處理自動駕駛中復(fù)雜的圖像識別、傳感器數(shù)據(jù)處理等
發(fā)表于 07-29 17:11
FPGA在自動駕駛領(lǐng)域有哪些應(yīng)用?
是FPGA在自動駕駛領(lǐng)域的主要應(yīng)用:
一、感知算法加速
圖像處理:自動駕駛中需要通過攝像頭獲取并識別道路信息和行駛環(huán)境,這涉及到大量的圖像處理任務(wù)。FPGA在處理圖像上的運算速度快,可
發(fā)表于 07-29 17:09
自動駕駛識別技術(shù)有哪些
自動駕駛的識別技術(shù)是自動駕駛系統(tǒng)中的重要組成部分,它使車輛能夠感知并理解周圍環(huán)境,從而做出智能決策。自動駕駛識別技術(shù)主要包括多種傳感器及其融合技術(shù),以及基于這些傳感器數(shù)據(jù)的處理和識別算
自動駕駛的傳感器技術(shù)介紹
自動駕駛的傳感器技術(shù)是自動駕駛系統(tǒng)的核心組成部分,它使車輛能夠感知并理解周圍環(huán)境,從而做出智能決策。以下是對自動駕駛傳感器技術(shù)的詳細介紹,內(nèi)容涵蓋常見類型、工作原理、在
自動駕駛汽車傳感器有哪些
自動駕駛汽車傳感器是實現(xiàn)自動駕駛功能的關(guān)鍵組件,它們通過采集和處理車輛周圍環(huán)境的信息,為自動駕駛系統(tǒng)提供必要的感知和決策依據(jù)。以下是對自動駕駛





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論