") EasyGo FPGA Coder高速控制實(shí)例分享 ——基于有源阻尼控制的LCL濾波三相逆變器半實(shí)物仿真測(cè)試
EasyGo FPGA Coder高速控制實(shí)例分享 ——基于有源阻尼控制的LCL濾波三相逆變器半實(shí)物仿真測(cè)試
LCL構(gòu)成的三階濾波器具有更好的高次諧波衰減能力,可以在總電感值比L型濾波器電感值小很多的條件下,實(shí)現(xiàn)相同的濾波效果。但是LCL濾波器本身存在諧振問(wèn)題,為提高穩(wěn)定性,一般會(huì)考慮加入虛擬阻尼控制的方式,通過(guò)疊加補(bǔ)償電流反饋來(lái)達(dá)到系統(tǒng)穩(wěn)定控制的效果。
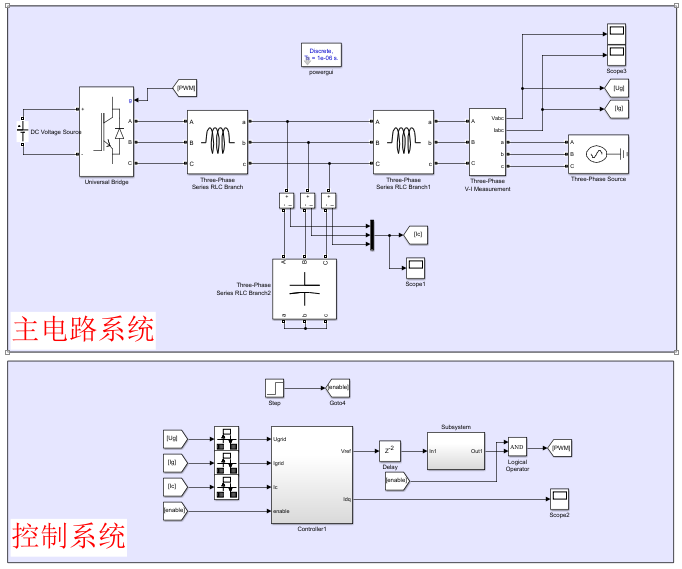
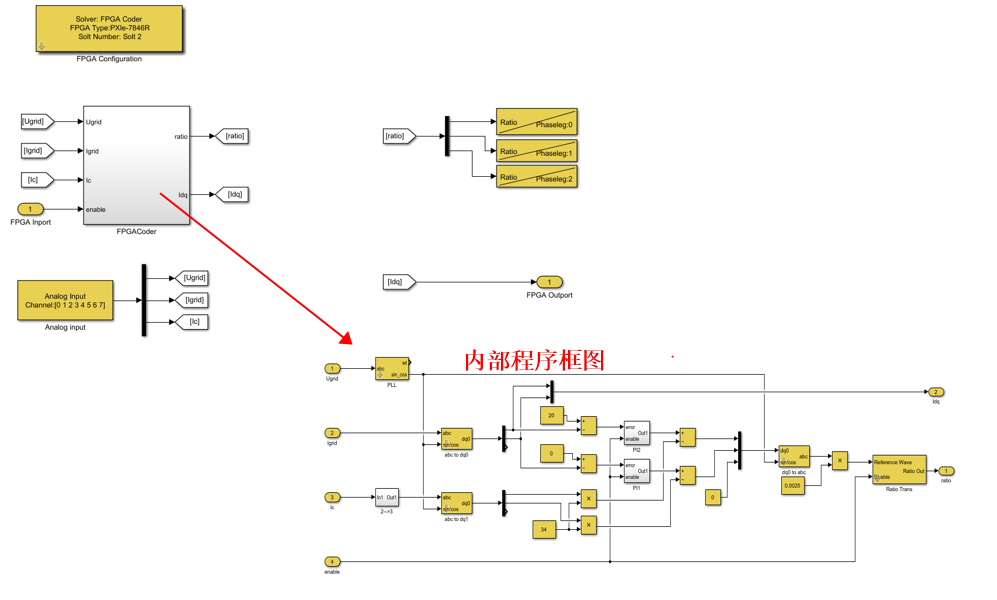
離線模型如下所示:
離線仿真結(jié)果:
如果不采用補(bǔ)償算法,LC之間會(huì)發(fā)生振蕩,而加入了補(bǔ)償算法可以有效抑制振蕩,保持系統(tǒng)的穩(wěn)定性。為了更好的模擬實(shí)際情況,我們采用半實(shí)物仿真的方式來(lái)進(jìn)行驗(yàn)證。
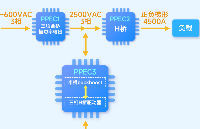
半實(shí)物仿真驗(yàn)證:
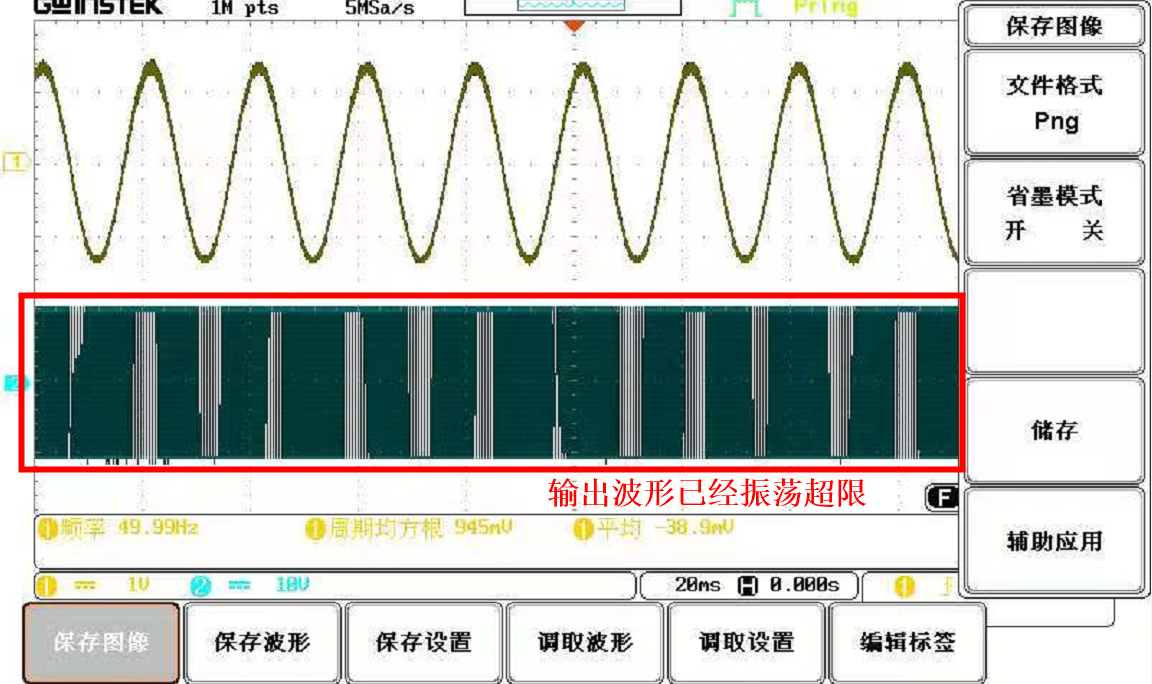
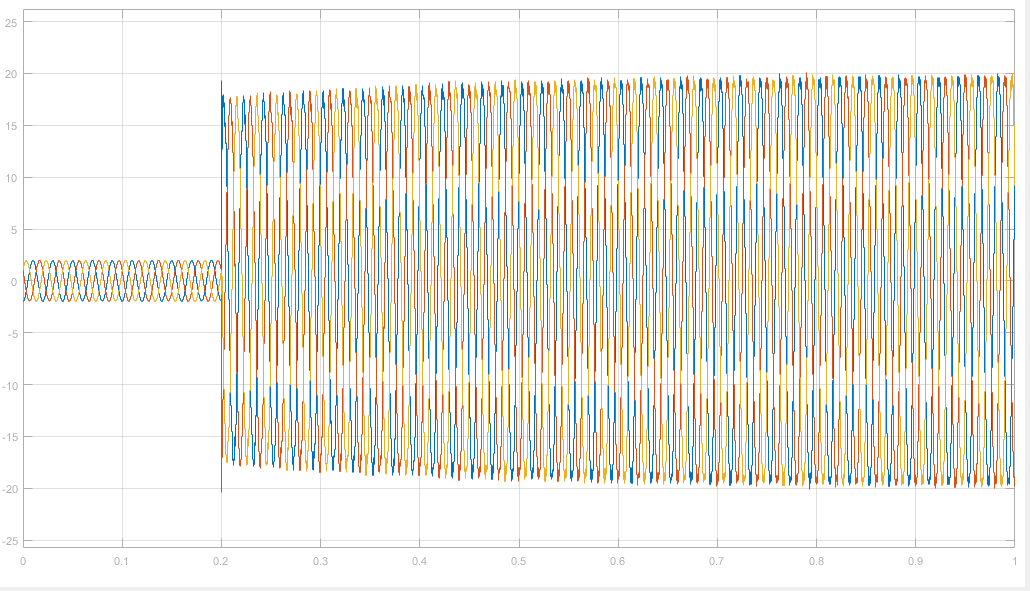
半實(shí)物仿真驗(yàn)證的時(shí)候,我們將主電路系統(tǒng)放入EasyGoNetBox電力電子仿真器中運(yùn)行,仿真步長(zhǎng)設(shè)置為1e-6,即1us實(shí)時(shí)仿真,將控制系統(tǒng)放入PXIBox中,控制模型運(yùn)行在10k,即1e-4步長(zhǎng)運(yùn)行。結(jié)果發(fā)現(xiàn),即使加入補(bǔ)償算法,系統(tǒng)電流還是會(huì)振蕩發(fā)散。
分析原因:
在真實(shí)系統(tǒng)中,實(shí)物控制器首先通過(guò)硬件采集,然后傳到運(yùn)算單元計(jì)算,最后輸出結(jié)果來(lái)發(fā)出指令,整個(gè)過(guò)程會(huì)有一定的延遲。因?yàn)椴捎昧搜a(bǔ)償算法,所以可能會(huì)由于補(bǔ)償?shù)臅r(shí)延導(dǎo)致系統(tǒng)不穩(wěn)定。
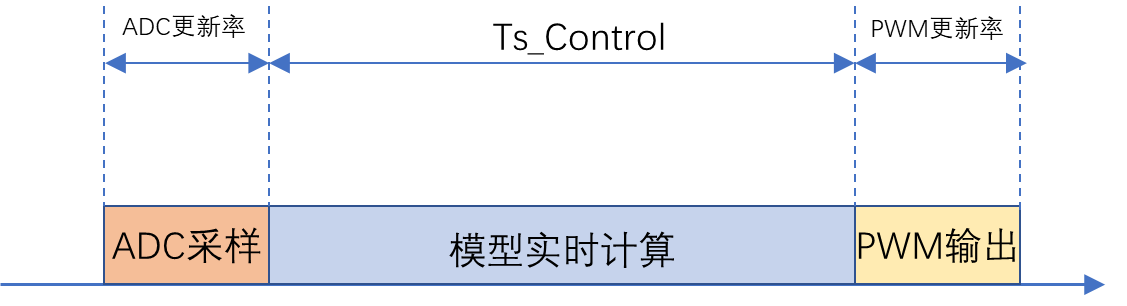
因?yàn)?a href="http://www.asorrir.com/tags/adc/" target="_blank">ADC的更新率,PWM更新率都非常快,一般只有幾百ns,最多1-2us的延遲(具體根據(jù)實(shí)際PWM的更新率以及ADC的更新率可計(jì)算出),相對(duì)于模型實(shí)時(shí)計(jì)算的周期Ts_Control要小很多,所以大部分的實(shí)際系統(tǒng)的時(shí)延是由于控制器的控制周期帶來(lái)的,考慮到以上幾個(gè)部分存在并行同步的運(yùn)行,所以時(shí)延可能會(huì)在1-2個(gè)Ts_Control。
原因離線分析:
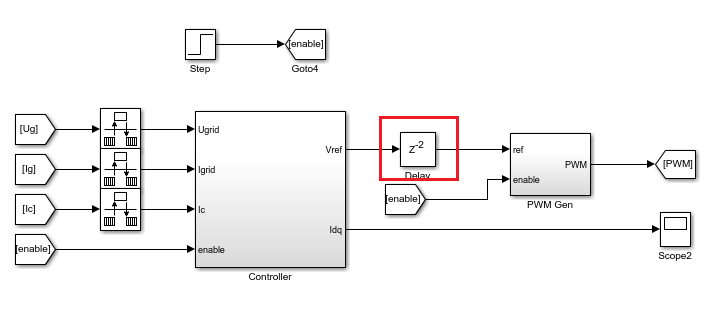
為了驗(yàn)證是否是因?yàn)闀r(shí)延導(dǎo)致算法運(yùn)行不合理,我們?cè)陔x線仿真程序中模擬實(shí)際控制系統(tǒng)的時(shí)延因素,時(shí)延選擇為2個(gè)Ts_Control延遲。同時(shí)調(diào)整不同的控制周期并進(jìn)行仿真對(duì)比:
- 控制速率200k,delay大約在1e-5s,kp=20,ki=100
- 控制速率50k,delay大約在4e-5s,kp=20,ki=100
- 控制速率20k,delay大約在1e-4s,kp=5,ki=40
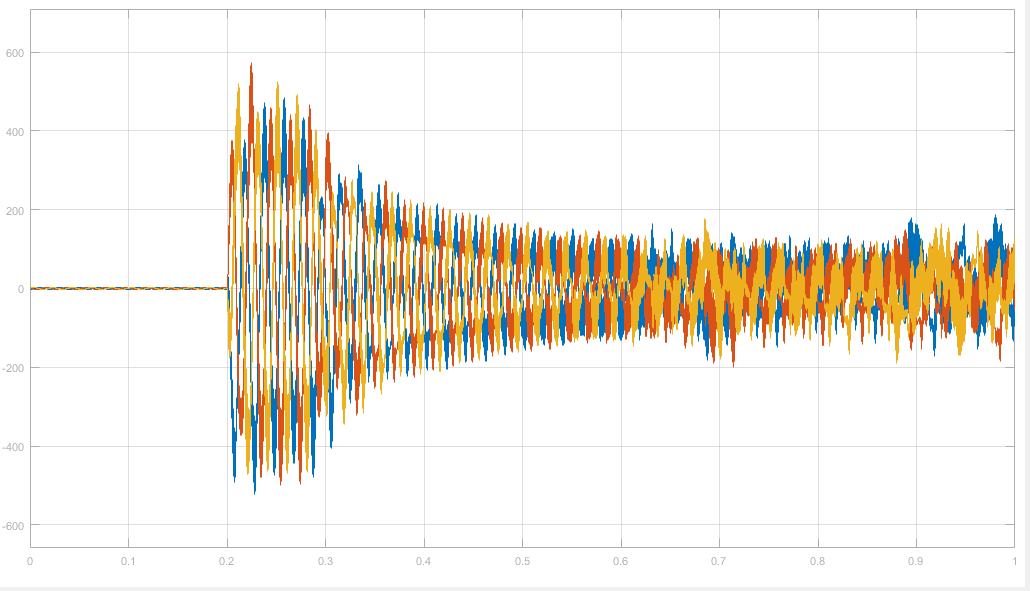
控制速率20k,delay大約在1e-4s,kp=20,ki=100(調(diào)整PI,有助于改善波形,但是還是會(huì)振蕩。)
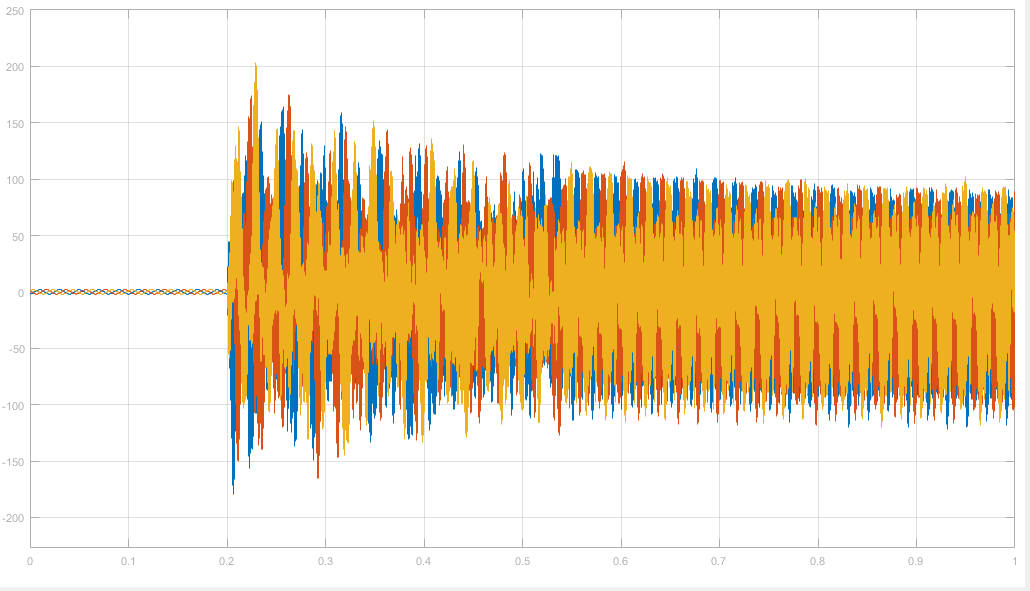
- 10k,delay大約在2e-4s,kp=5,ki=40
初步結(jié)論:
對(duì)于此系統(tǒng),確實(shí)過(guò)大的時(shí)延會(huì)帶來(lái)影響,所以控制速率越快,實(shí)際系統(tǒng)的延遲越小,控制的穩(wěn)定性越好。從離線仿真效果來(lái)看,要忽略時(shí)延帶來(lái)的影響,需要控制速率至少要達(dá)到50k,甚至200k的控制速率,這種控制速率用傳統(tǒng)的實(shí)時(shí)CPU運(yùn)行方式是無(wú)法達(dá)到的。EasyGoFPGA Coder技術(shù)可以非常簡(jiǎn)單將模型運(yùn)行在FPGA上,輕松完成200k的實(shí)時(shí)控制。
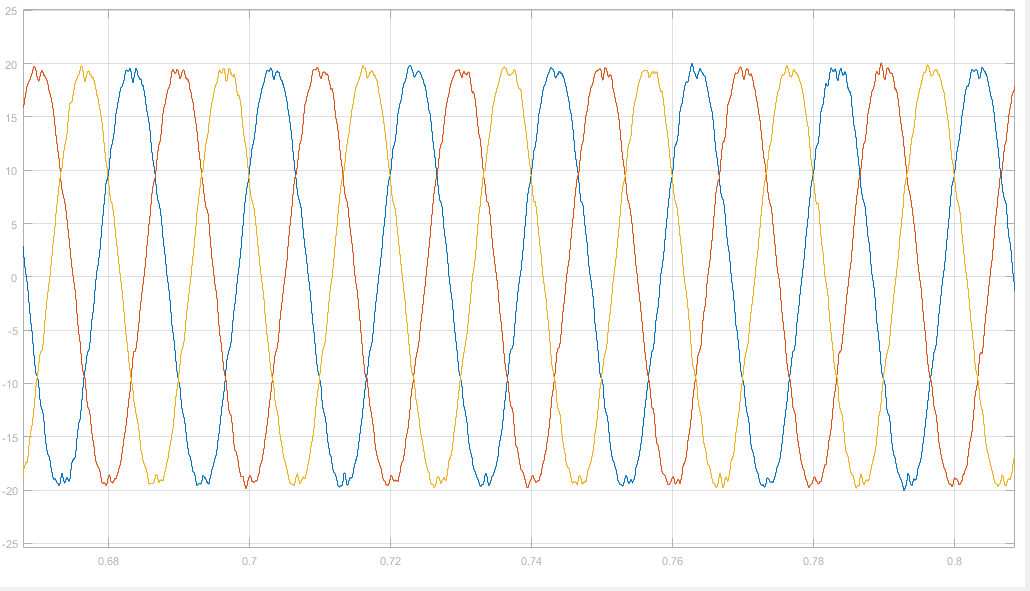
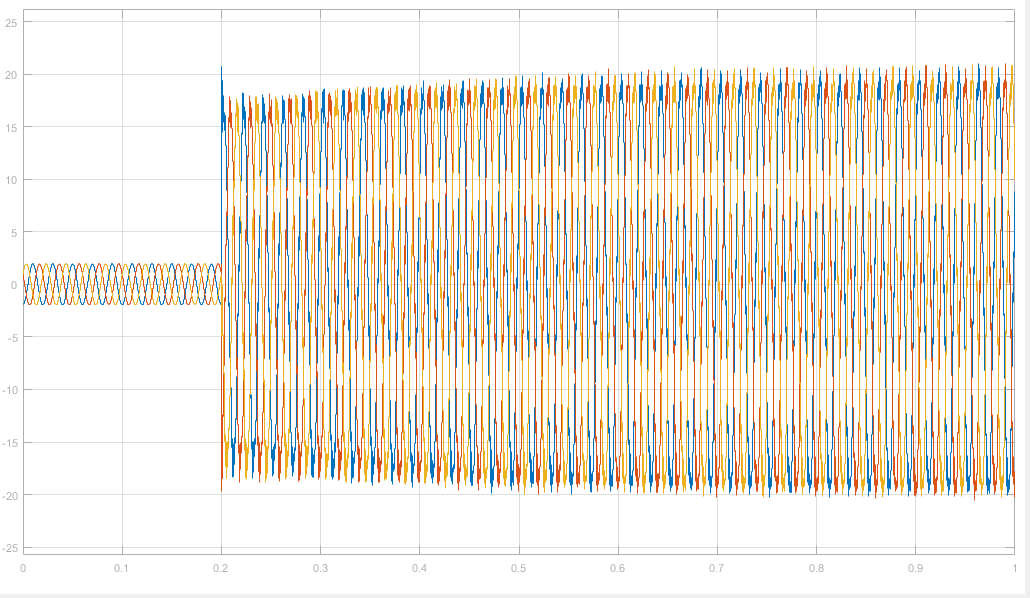
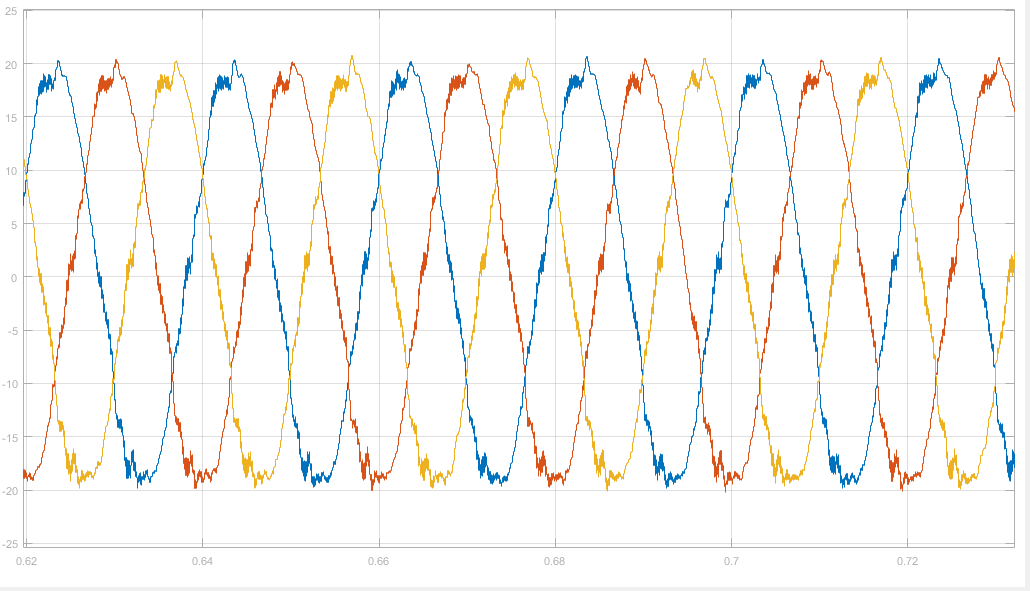
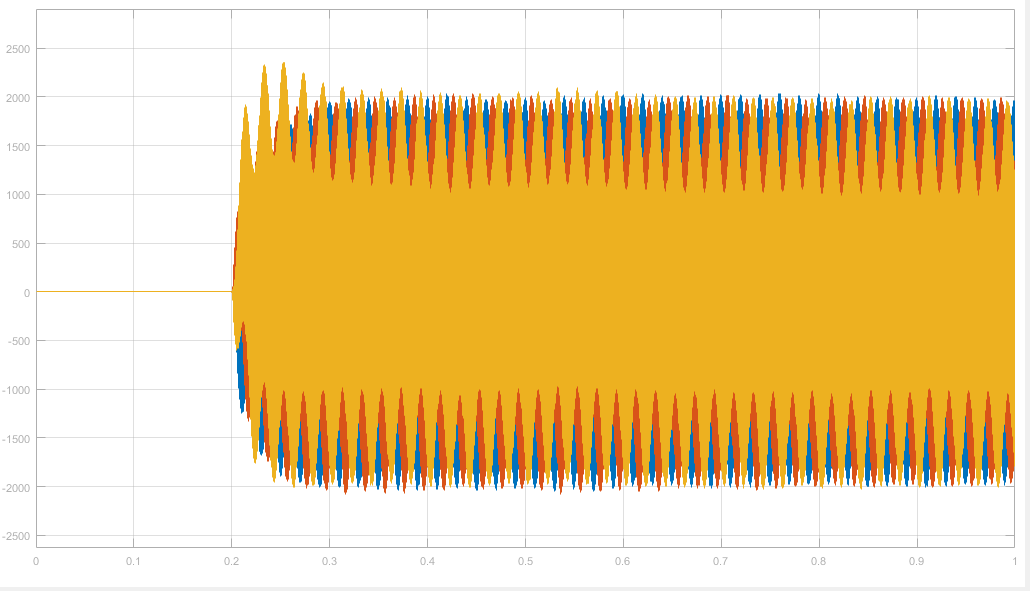
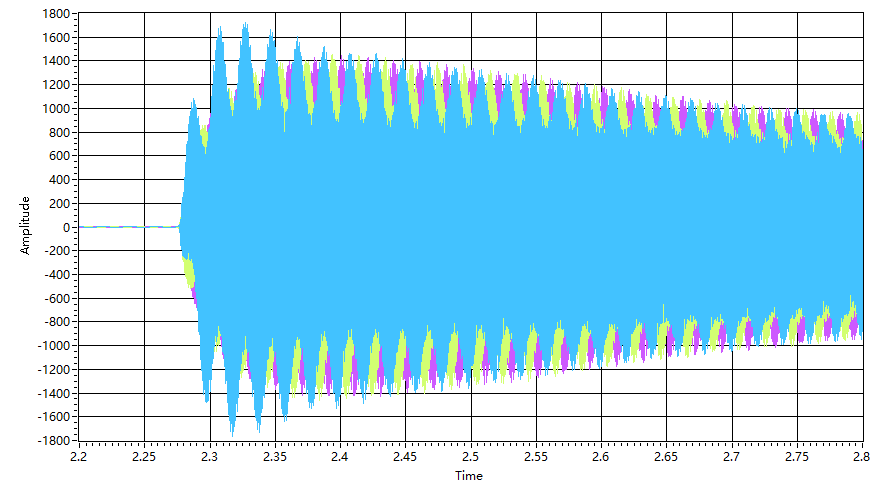
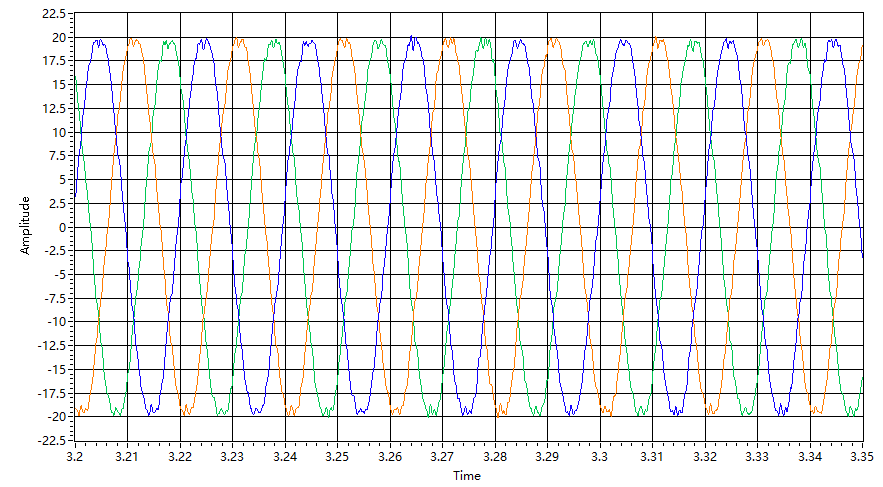
實(shí)際運(yùn)行的結(jié)果如下(錄波波形):
不加補(bǔ)償算法:
加補(bǔ)償算法:
-
電力電子
+關(guān)注
關(guān)注
29文章
612瀏覽量
49503 -
硬件在環(huán)
+關(guān)注
關(guān)注
2文章
13瀏覽量
11931 -
實(shí)時(shí)仿真
+關(guān)注
關(guān)注
0文章
31瀏覽量
8810 -
半實(shí)物仿真
+關(guān)注
關(guān)注
0文章
9瀏覽量
7142
發(fā)布評(píng)論請(qǐng)先 登錄
光伏發(fā)電系統(tǒng)篇:三電平并網(wǎng)逆變器實(shí)時(shí)仿真
EasyGo 實(shí)時(shí)仿真丨DC-AC-MMC 實(shí)時(shí)仿真應(yīng)用
EasyGo 實(shí)時(shí)仿真丨儲(chǔ)能系統(tǒng)有功無(wú)功解耦控制應(yīng)用
PPEC-HIL 三相整流逆變實(shí)時(shí)仿真測(cè)試
三相PWM逆變器有哪些特點(diǎn)
EasyGo實(shí)時(shí)仿真丨PCS儲(chǔ)能變流器控制仿真應(yīng)用
EasyGo實(shí)時(shí)仿真丨PCS儲(chǔ)能變流器控制仿真應(yīng)用
EasyGo實(shí)時(shí)仿真丨三相永磁同步電機(jī)開環(huán)實(shí)驗(yàn)仿真應(yīng)用
EasyGo實(shí)時(shí)仿真丨三相永磁同步電機(jī)開環(huán)實(shí)驗(yàn)仿真應(yīng)用

matlab中三相逆變器參數(shù)怎么設(shè)置
三相逆變器輸出電壓與輸入電壓關(guān)系
EasyGo使用筆記丨分布式光伏集群并網(wǎng)控制硬件在環(huán)仿真應(yīng)用
三相電壓型逆變器基本原理
EasyGo實(shí)時(shí)仿真丨飛輪儲(chǔ)能系統(tǒng)硬件在環(huán)仿真測(cè)試





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論