 ArkUI中的線程和看門狗機制
ArkUI中的線程和看門狗機制

點擊藍字 ╳ 關注我們

吳文璐
深圳開鴻數字產業發展有限公司
OS框架開發工程師
一、前言
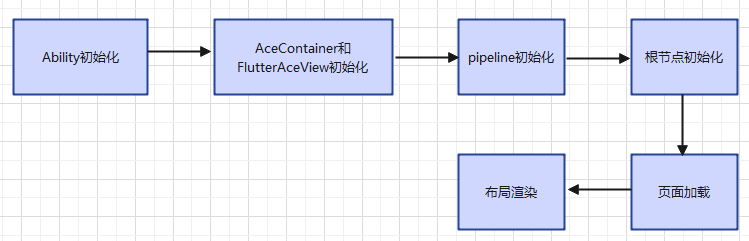
二、ArkUI中的線程
void AceContainer::InitializeTask()
{
auto flutterTaskExecutor = Referenced::MakeRefPtr();
flutterTaskExecutor->InitPlatformThread(useCurrentEventRunner_);
taskExecutor_ = flutterTaskExecutor;
// No need to create JS Thread for DECLARATIVE_JS
if (type_ == FrontendType::DECLARATIVE_JS) {
GetSettings().useUIAsJSThread = true;
} else {
flutterTaskExecutor->InitJsThread();
}
} enum class TaskType : uint32_t {
PLATFORM = 0,
UI,
IO,
GPU,
JS,
BACKGROUND,
UNKNOWN,
};
auto&& touchEventCallback = [context = pipelineContext_, id = instanceId_](
const TouchEvent& event, const std::function& markProcess) {
ContainerScope scope(id);
context->GetTaskExecutor()->PostTask(
[context, event, markProcess]() {
context->OnTouchEvent(event);
CHECK_NULL_VOID_NOLOG(markProcess);
markProcess();
},
TaskExecutor::UI);
};三、各種類型的TaskRunner如何初始化?
void FlutterTaskExecutor::InitPlatformThread(bool useCurrentEventRunner)
{
#ifdef OHOS_STANDARD_SYSTEM
platformRunner_ = flutter::CurrentTaskRunner(useCurrentEventRunner);
#else
fml::EnsureInitializedForCurrentThread();
platformRunner_ = fml::GetCurrent().GetTaskRunner();
#endif
FillTaskTypeTable(TaskType::PLATFORM);
}fml::RefPtr PlatformTaskRunner::CurrentTaskRunner(bool useCurrentEventRunner)
{
return PlatformTaskRunnerAdapter::CurrentTaskRunner(useCurrentEventRunner);
}fml::RefPtr PlatformTaskRunnerAdapter::CurrentTaskRunner(bool useCurrentEventRunner)
{
if (useCurrentEventRunner) {
return fml::MakeRefCounted(useCurrentEventRunner);
}
if (taskRunner_) {
return taskRunner_;
}
taskRunner_ = fml::MakeRefCounted(useCurrentEventRunner);
return taskRunner_;
}PlatformTaskRunnerAdapter::PlatformTaskRunnerAdapter(bool useCurrentEventRunner)
: fml::TaskRunner(nullptr)
{
if (useCurrentEventRunner) {
eventRunner_ = OHOS::Current();
} else {
eventRunner_ = OHOS::GetMainEventRunner();
}
eventHandler_ = std::make_shared(eventRunner_);
}
void PlatformTaskRunnerAdapter::closure task)
{
eventHandler_->PostTask(std::move(task));
}void FlutterTaskExecutor::InitOtherThreads(const flutter::TaskRunners& taskRunners)
{
uiRunner_ = taskRunners.GetUITaskRunner();
ioRunner_ = taskRunners.GetIOTaskRunner();
#ifdef NG_BUILD
gpuRunner_ = taskRunners.GetRasterTaskRunner();
#else
gpuRunner_ = taskRunners.GetGPUTaskRunner();
#endif
//...此處省略若干行
}FlutterAceView* FlutterAceView::CreateView(int32_t instanceId, bool useCurrentEventRunner, bool usePlatformThread)
{
FlutterAceView* aceSurface = new Platform::FlutterAceView(instanceId);
if (aceSurface != nullptr) {
aceSurface->IncRefCount();
}
flutter::Settings settings;
settings.instanceId = instanceId;
settings.platform = flutter::ACE_PLATFORM_OHOS;
#ifndef GPU_DISABLED
settings.enable_software_rendering = false;
#else
settings.enable_software_rendering = true;
#endif
#ifdef ENABLE_ROSEN_BACKEND
settings.use_system_render_thread = SystemProperties::GetRosenBackendEnabled();
#endif
settings.platform_as_ui_thread = usePlatformThread;
settings.use_current_event_runner = useCurrentEventRunner;
// ...此處省略若干行
auto shell_holder = std::make_unique(settings, false);
if (aceSurface != nullptr) {
aceSurface->SetShellHolder(std::move(shell_holder));
}
return aceSurface;
}OhosShellHolder::OhosShellHolder(
flutter::Settings settings,
bool is_background_view)
: settings_(std::move(settings))
{
// ...此處省略若干行
// The current thread will be used as the platform thread. Ensure that the
// message loop is initialized.
fml::EnsureInitializedForCurrentThread();
fml::RefPtr gpu_runner;
fml::RefPtr ui_runner;
fml::RefPtr io_runner;
fml::RefPtr platform_runner =
PlatformTaskRunnerAdapter::CurrentTaskRunner(settings_.use_current_event_runner);
if (is_background_view) {
auto single_task_runner = thread_host_.ui_thread->GetTaskRunner();
gpu_runner = single_task_runner;
ui_runner = single_task_runner;
io_runner = single_task_runner;
} else {
if (settings_.platform_as_ui_thread) {
ui_runner = platform_runner;
} else {
ui_runner = thread_host_.ui_thread->GetTaskRunner();
}
if (!settings_.use_system_render_thread) {
gpu_runner = thread_host_.gpu_thread->GetTaskRunner();
} else {
gpu_runner = ui_runner;
}
if (settings_.use_io_thread) {
io_runner = thread_host_.io_thread->GetTaskRunner();
} else {
io_runner = ui_runner;
}
}
flutter::TaskRunners task_runners(thread_label, // label
platform_runner, // platform
gpu_runner, // gpu
ui_runner, // ui
io_runner // io
);
void FlutterTaskExecutor::InitJsThread(bool newThread)
{
if (newThread) {
jsThread_ = std::make_unique(GenJsThreadName());
jsRunner_ = jsThread_->GetTaskRunner();
} else {
jsRunner_ = uiRunner_;
}
PostTaskToTaskRunner(
jsRunner_, [weak = AceType::WeakClaim(this)] { FillTaskTypeTable(weak, TaskType::JS); }, 0);
}void RosenFontLoader::LoadFromNetwork(const OHOS::RefPtr& context)
{
auto weakContext = AceType::RawPtr(context));
context->GetTaskExecutor()->PostTask(
[weak = AceType::WeakClaim(this), weakContext] {
auto fontLoader = weak.Upgrade();
auto context = weakContext.Upgrade();
if (!fontLoader || !context) {
return;
}
std::vector fontData;
if (!DownloadManager::GetInstance().Download(fontLoader->familySrc_, fontData) || fontData.empty()) {
return;
}
//...此處省略若干行
},
TaskExecutor::BACKGROUND);
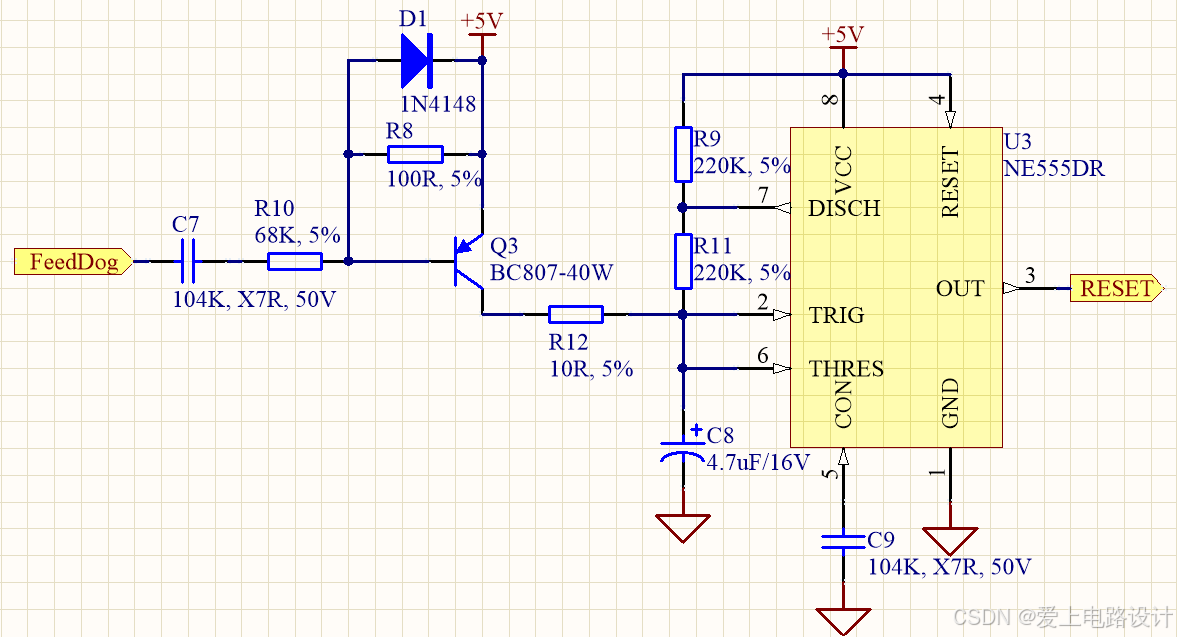
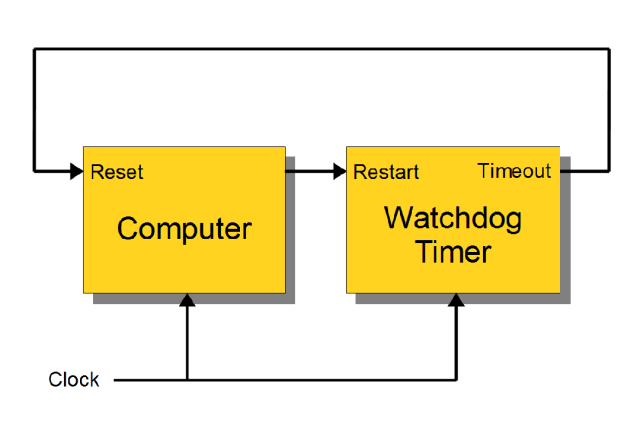
}四、ArkUI中的看門狗

原文標題:ArkUI中的線程和看門狗機制
文章出處:【微信公眾號:OpenAtom OpenHarmony】歡迎添加關注!文章轉載請注明出處。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
鴻蒙
+關注
關注
60文章
2620瀏覽量
44058 -
OpenHarmony
+關注
關注
29文章
3854瀏覽量
18617
原文標題:ArkUI中的線程和看門狗機制
文章出處:【微信號:gh_e4f28cfa3159,微信公眾號:OpenAtom OpenHarmony】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
TPS3431 帶啟用功能的標準可編程看門狗定時器數據手冊
TPS3431 是一款標準的可編程看門狗定時器,具有使能功能,適用于各種應用。看門狗超時具有 15% 的精度、高精度定時 (–40°C 至 +125°C) 和 25°C 時 2.5% 的典型值
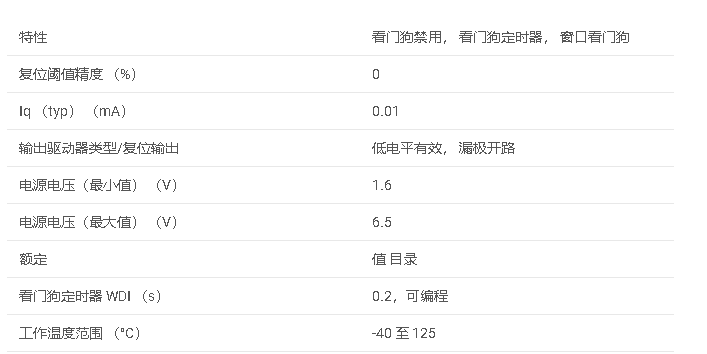
TPS3430 具有可編程復位延遲的窗口看門狗定時器數據手冊
TPS3430 是一款獨立的窗口看門狗定時器,具有可編程看門狗窗口和可編程看門狗復位延遲,適用于各種應用。TPS3430窗口看門狗可實現 2.5% 的定時精度(25°C 時的典型值),
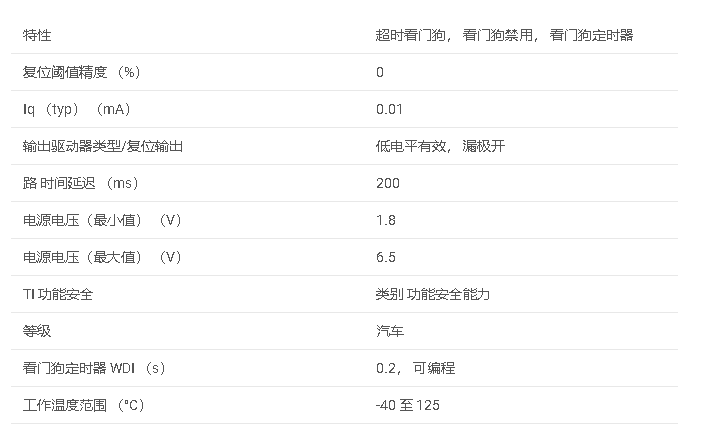
TPS3430-Q1 具有可編程復位延遲的汽車級窗口看門狗定時器數據手冊
TPS3430-Q1 是一款獨立的汽車窗口看門狗定時器,具有可編程看門狗窗口和可編程看門狗復位延遲,適用于汽車應用。TPS3430-Q1 窗口看門狗可實現 2.5% 的定時精度(25°

TPS3431-Q1 具有使能功能的汽車標準可編程看門狗定時器數據手冊
TPS3431-Q1 是一款標準的汽車可編程看門狗定時器,具有用于汽車應用的使能功能。看門狗超時具有 15% 的精度、高精度定時 (–40°C 至 +125°C) 和 25°C 時 2.5
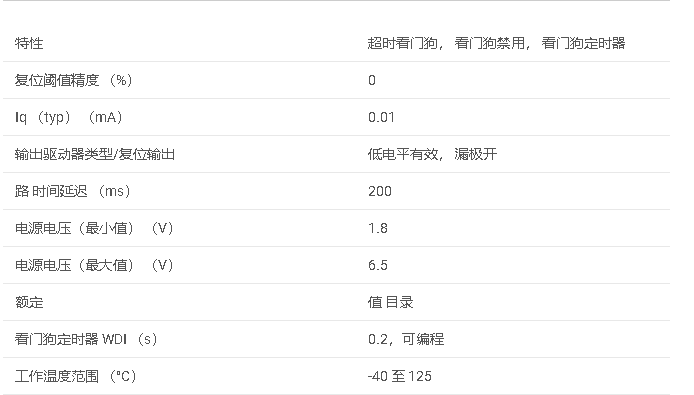
TPS3435 納米靜態電流精密超時看門狗定時器數據手冊
TPS3435 是一款超低功耗 (典型值為 250nA) 器件,提供可編程超時看門狗定時器。
TPS3435 提供高精度超時看門狗定時器,具有適用于各種應用的一系列功能。超時看門狗定時器可由
TPS3435-Q1 汽車級納米靜態電流精密超時看門狗定時器數據手冊
TPS3435-Q1 是一款超低功耗 (典型值為 250nA) 器件,提供可編程超時看門狗定時器。
TPS3435-Q1 提供高精度超時看門狗定時器,具有許多功能,適用于各種應用。超時看門狗

看門狗,你真的會用嗎?
嵌入式系統開發中,看門狗是一種重要的機制,用于在程序異常時自動重啟系統,保障其穩定性。本文將深入探討看門狗及其在程序穩定性中的作用,幫助您更

安利給工程師!看門狗相關知識
看門狗能夠及時檢測并采取相應措施,從而避免系統長時間處于故障狀態。本文將詳細介紹看門狗的工作原理及其正確使用方法。 同時通過具體示例解析,教你如何在一個簡單的LuatOS項目中集成看門狗定時器,設置

抄作業!看門狗定時器必備知識
Air201在模組內部集成了硬件看門狗,今天就一起來聊聊~ 本文將帶你了解看門狗的工作原理、應用架構、定時時間設置、軟硬件看門狗的區別,以及看門狗定時器的典型應用場景及關鍵設計因素等內
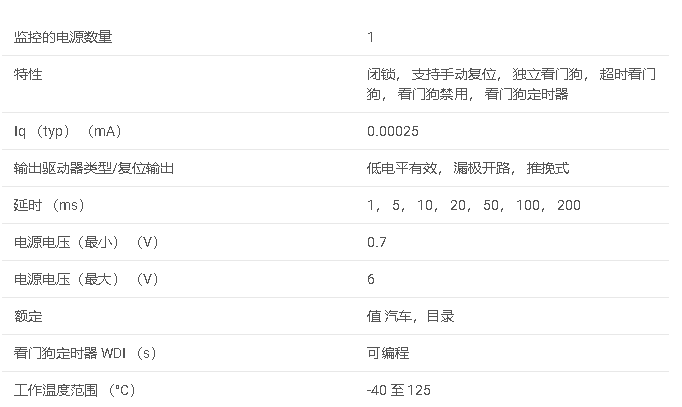
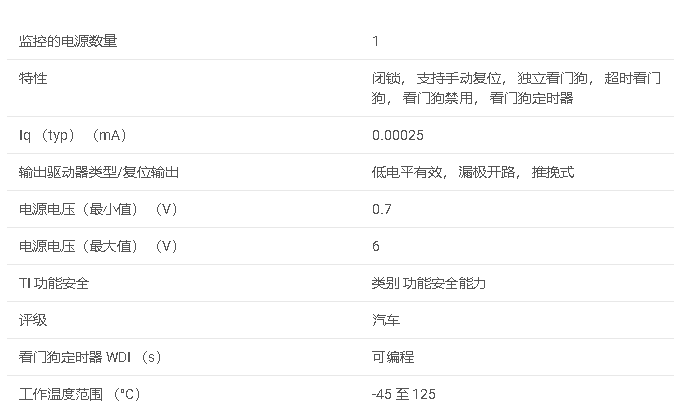
一文詳解看門狗/電壓監控芯片規格書
一、關于一些看門狗、電壓監控的疑問?1.什么是看門狗?看門狗,又叫Watchdog,本質上來說就是一個定時器電路,一般有一個輸入和一個輸出,其中輸入叫做喂狗,輸出一般連接到另外一個部分的復位端,一般
看門狗定時器的工作原理
看門狗定時器是一種獨立的計時器硬件模塊,其核心功能是倒計時。如果系統軟件在計時器超時前沒有對其進行復位操作(即“喂狗”),看門狗將觸發一個預定義的動作,通常是系統復位或中斷。
單片機開發:使用內部看門狗定時器(WDT)還是外掛看門狗芯片?
在電子產品中,有時候需要看門狗定時器(WDT),看門狗芯片有外部和內置兩種。在設計之初,要不要使用看門狗芯片?這是個值得考慮的問題。在本文中,英銳恩技術工程師對內部和外部
發表于 09-25 13:46






 工商網監
工商網監
評論