 KUKA_SafeRobot檢查參考點請求
KUKA_SafeRobot檢查參考點請求
KUKA _SafeRobot->SafeOperation檢查參考.
調整參考用于檢查機器人的當前位置和附加軸是否與r參考位置一致。
當使用Modulo 360°調整參考值時,即考慮到無限旋轉的軸,即 h。參考位置始終相對于圓。
如果當前位置和參考位置之間的偏差太大,則調整參考失敗。機器人以安全停止1停止,并且只能在操作模式T1下移動。如果調整參考成功,則可以使用安全控制器對機器人進行安全監控。
只要未進行調整參考,就不會驗證要監視的位置。建議盡快進行調整參考。
安全專員必須通過風險評估來確定特定系統是否需要其他安全措施,例如: B.不進行調整參照時的參照停止。
必須將要安全監控的每個軸分配給一個參考組。機器人軸始終分配給參考組1.可以將其他軸分配給其他參考組,也可以分配給參考組1
對于調整參考,參考組的所有軸都必須在參考位置,以阻尼參考按鈕。如果參考組的所有軸均未參與阻尼參考按鈕,則無法檢查軸的位置。
以下事件要求調整引用:
1.機器人控制重新啟動(內部要求)
2.機器人已重新調整(內部要求)
3.I / O驅動程序已重新配置(內部請求)
4.外部輸入$ MASTERINGTEST_REQ_EXT,例如 B.來自安全PLC(外部要求)
機器人控件啟動后,無需調整基準即可將機器人移動2小時。監視時間結束后,機器人將以安全停止1停止,安全控制器將發出以下消息:確認:調整參考時間間隔已到期。
調整引用可以通過以下方式啟動:
自動地
為此,將“調整參考”序列集成到應用程序中,以便循環調用它。如果請求調整參考,程序將檢測到它并開始調整參考。
手動地
為此,請手動啟動“調整參考”序列。如果請求調整參考,程序將識別出該信息并啟動調整參考。

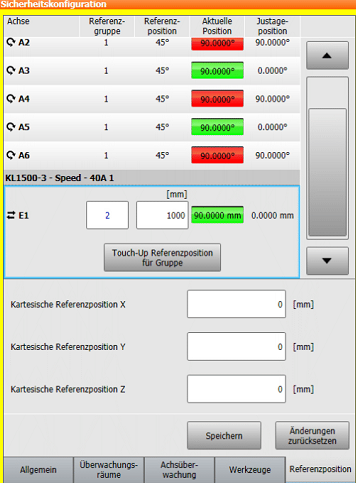
Referenzgruppe參考組
必須將要安全監控的每個軸分配給一個參考組。機器人軸始終分配給參考組1。可以將其他軸分配給其他參考組,也可以分配給參考組1 。
1:機器人軸
1…3:附加軸 默認值:1
--------------
Referenzposition參考位置
參考位置的軸特定坐標
為了監視調整,為特定的直角坐標參考位置定義了機器人軸的軸角。在進行調整參考的情況下,機器人將逼近直角坐標參考位置,并將實際位置與軸的目標位置進行比較。
旋轉軸:-360°…+ 360°
默認值:45°
線性軸:-30 000 mm…+30 000 mm
默認值:1,000毫米
-----------------
Aktuelle Position 當前位置
軸特定的實際位置(僅顯示)
?紅色:參考位置太靠近調整位置,因此不允許
?綠色:允許的參考位置
---------------
Justageposition調整位置
調節位置的軸角在機床數據中定義。(僅顯示)
----------------
Kartesische Referenzposition X,Y, Z直角參考位置X,Y,Z
相對于WORLD坐標系的直角坐標參考位置的X,Y,Z坐標(參考組1的顯示)
直角坐標參考位置的坐標是指安裝法蘭的中心點。
審核編輯 :李倩
-
機器人
+關注
關注
213文章
29508瀏覽量
211634 -
KUKA
+關注
關注
3文章
218瀏覽量
16900
原文標題:KUKA _SafeRobot 檢查參考點請求-
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄

廣凌創新解決方案:高校標準化考點建設








 工商網監
工商網監
評論