 基于三維點云的帶式輸送機跑偏及堆煤監測方法
基于三維點云的帶式輸送機跑偏及堆煤監測方法
輸送帶跑偏和堆煤是煤礦帶式輸送機常見故障,實際中多采用接觸式傳感器檢測這2種故障,在耐用性、靈敏度、可靠性等方面無法滿足煤礦安全生產要求。近年來,基于圖像處理的帶式輸送機故障檢測方法被提出,但不同的帶式輸送機應用場所中環境光照條件不同,且輸送帶表面污漬會導致顏色信息變化,影響圖像處理效果,導致誤識別問題。三維點云是通過對物體進行一系列空間點采樣得到的表征物體表面信息的數據,其與圖像數據相比,能更純粹地反映監測對象的形狀和位置信息,而不存在顏色信息的干擾。本文提出基于三維點云的帶式輸送機跑偏及堆煤監測方法,可實時監測輸送帶跑偏和堆煤故障,降低工作人員勞動強度,提升帶式輸送機運行安全性。
帶式輸送機跑偏及堆煤監測系統
帶式輸送機跑偏及堆煤監測系統由線激光雙目相機、計算機、PLC、觸摸屏、變頻器、速度傳感器等組成。相機安裝在槽型帶式輸送機正上方,通過激光發射器將一字線激光投射到下方輸送帶表面,利用雙目視差原理進行深度測量。在輸送帶回程段安裝光電式速度傳感器,用于測量輸送帶實時運行速度。隨著帶式輸送機運行,相機對輸送帶進行線掃描,實時生成點云數據,并將數據發送至計算機。系統通過分析處理點云數據對輸送帶跑偏和堆煤故障進行實時監測。

輸送帶跑偏監測原理
線激光雙目相機按照一定的掃描間隔進行采樣,提取輸送帶運行方向上有限長度的點云數據片段進行實時分析。激光線除投射于輸送帶以外,還投射于機架、托輥等部件表面,形成噪點數據。采用歐氏聚類算法濾除機架等部件的掃描信息,采用隨機采樣一致性(RANSAC) 算法濾除托輥區域點云數據。
在濾除噪點后的各采樣分段數據中,各幀數據在輸送帶寬度方向上的最小值為輸送帶邊沿信息。取這些最小值的中位數作為采樣分段數據的輸送帶邊沿表征。用輸送帶寬度方向的中心點作為表征指標,以反映輸送帶偏移趨勢。對采樣數據段的輸送帶左右邊沿表征值進行計算,得到中心表征值和均中心表征值,以均中心表征值作為反映跑偏趨勢的實時監測指標。
輸送帶堆煤監測原理
引入“煤流等效高度”的概念來實時評估堆煤程度。在輸送帶寬度方向上從每幀1 500個點中等間距選取200個點,計算高度方向坐標平均值,并將其作為該幀數據的單幀等效高度。將空載與帶載時的單幀等效高度作差,得到煤流等效高度。若其大于設定的堆煤閾值,則認為此時帶式輸送機發生堆煤故障。
試驗驗證
跑偏監測功能驗證
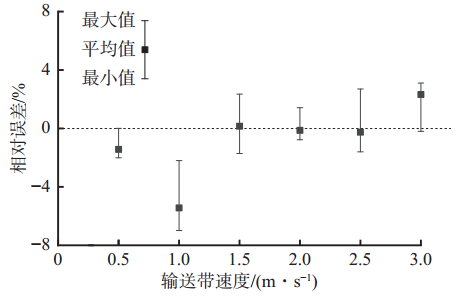
通過絲杠調整前后改向滾筒軸線到機架 2 個端面的距離,進而改變改向滾筒角度,人為誘導跑偏發生。設置輸送帶速度在0.5~3.0 m/s范圍內,以0.5 m/s為增量。各速度下分別設置4組跑偏試驗,其中人為誘導向左和向右跑偏各 2 組。測試結果表明,邊沿點檢測相對誤差為 -6.99%~3.11%(即檢測誤差為-2.84~1.26 mm),最大誤差僅為 2.84 mm,驗證了系統能可靠實現跑偏故障監測功能。
在 0.5~3.0 m/s 輸送帶速度范圍內人為誘導跑偏,以跑偏系數衡量跑偏趨勢,其為當前采樣點均中心表征值與其前第 20個采樣點均中心表征值的差值與這 2 個采樣點數據獲取時間間隔內輸送帶運行距離的比值。在不同的輸送帶速度下進行24 組試驗,有 21 組試驗在預測出跑偏趨勢后,輸送帶均在 0.5~4.0圈內發生了朝預測方向跑偏的故障。剩余3組試驗在檢測出跑偏趨勢后,最終趨于近平衡狀態。試驗結果驗證了輸送帶偏移預測的正確性。
堆煤監測功能驗證
通過試驗標定確定堆煤閾值。在輸送帶上集中堆積煤料,直至煤料堆邊沿到輸送帶某一邊沿的距離小于輸送帶寬度的 1/10,對煤料堆進行掃描,得出各幀點云數據中的最大等效高度。在標定過程中進行 20 組測試,選擇其中最小值作為堆煤閾值。標定結果為26.85 mm,對應的煤料堆質量為 27.6 kg。在14~41 kg區間內,以1 kg為增量,在輸送帶上堆積煤炭樣本,并對煤料堆進行掃描。計算各幀數據的最大等效高度,并與堆煤閾值比較。試驗結果表明,煤炭質量在14~24 kg及28~41 kg 范圍內檢測結果均正確,25~27 kg范圍內存在檢測錯誤情況,原因是這 3 個煤炭樣本質量較接近觸發堆煤報警的臨界值 27.6 kg,由于堆積密度變化等因素,最大等效高度會圍繞堆煤閾值有一定波動,但波動不大。
審核編輯 :李倩
-
圖像處理
+關注
關注
27文章
1324瀏覽量
57667 -
三維
+關注
關注
1文章
516瀏覽量
29339 -
監測
+關注
關注
2文章
3880瀏覽量
45310
原文標題:基于三維點云的帶式輸送機跑偏及堆煤監測方法
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄

工業氧化鎂管鏈輸送機 無塵管鏈式粉料輸送機性能

什么是三維點云分割
皮帶輸送機監測預警物聯網系統
輸送帶保護裝置FD536-GHP-PP-001兩級跑偏開關有什么影響
輸送帶保護裝置SMPP03-CAN-W兩級跑偏開關適用范圍
【?嵌入式機電一體化系統設計與實現?閱讀體驗】+磁力輸送機系統設計的創新與挑戰
防偏保護 KPT120-35兩級跑偏開關用于檢測輸送帶的運行狀態
中偉視界:礦山智能化,多種判斷方法提升皮帶跑偏檢測可靠性
友思特方案 基于三維點云實現PCB裝配螺絲視覺檢測

高空輸送機遠程監控運維管理系統解決方案

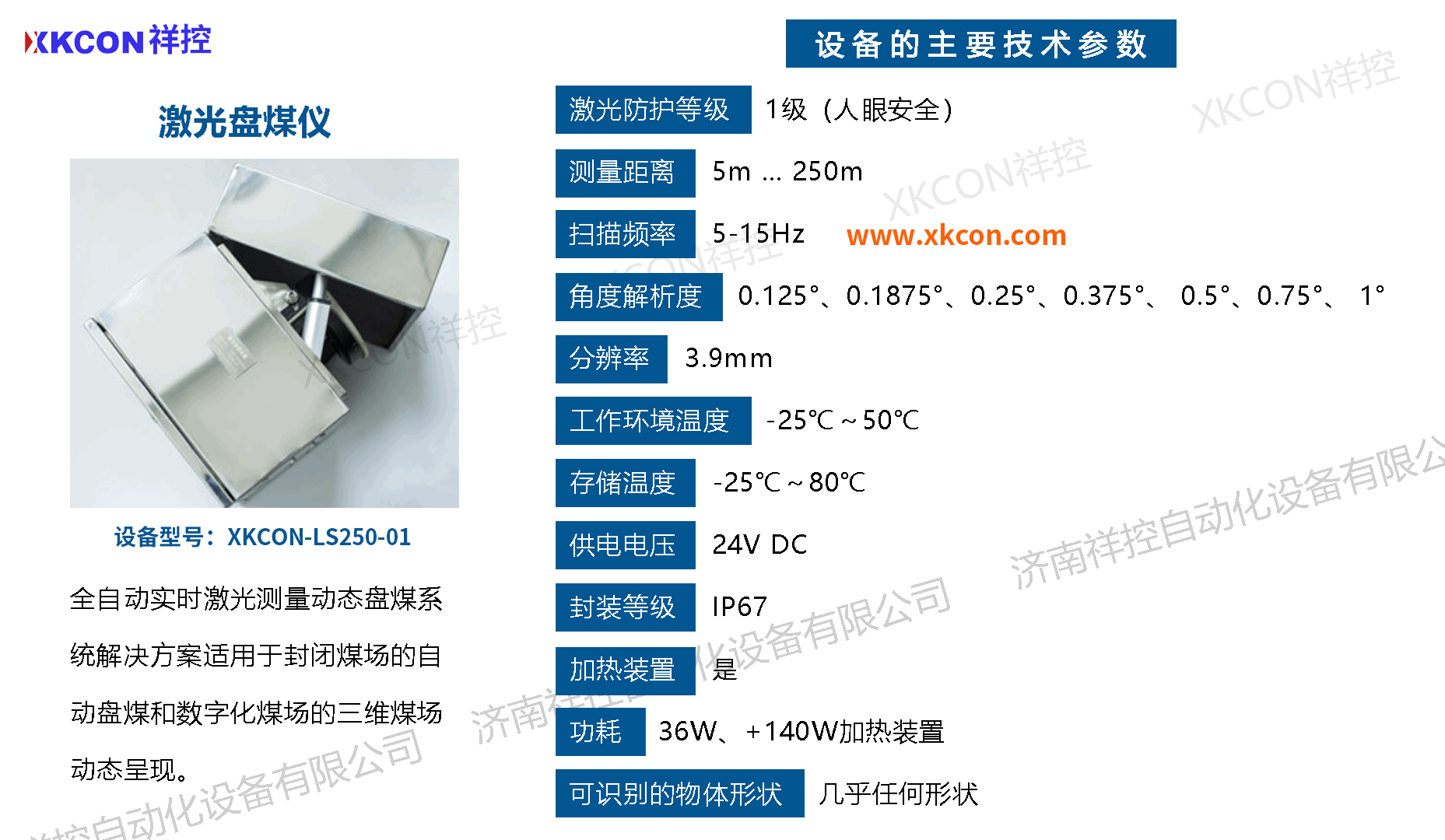
基于三維激光掃描技術的XKCON祥控激光盤煤儀可高精度、快速、全覆蓋盤煤,相對精度優于0.5‰
泰來三維|數字化工廠_煤礦三維掃描數字化解決方案






 工商網監
工商網監
評論