") 中偉視界:礦山智能化,多種判斷方法提升皮帶跑偏檢測可靠性
中偉視界:礦山智能化,多種判斷方法提升皮帶跑偏檢測可靠性

皮帶輸送機(jī)廣泛應(yīng)用于礦山、港口、化工等行業(yè),其正常運(yùn)行對生產(chǎn)效率和安全性至關(guān)重要。皮帶跑偏是輸送機(jī)常見的故障之一,可能導(dǎo)致物料撒落、設(shè)備損壞,甚至引發(fā)安全事故。為了有效監(jiān)測和預(yù)防皮帶跑偏,現(xiàn)代技術(shù)利用多種算法模型和判斷方法來實(shí)現(xiàn)實(shí)時檢測和報警。本文將詳細(xì)介紹幾種皮帶跑偏檢測的算法模型及其判斷方法。
一、皮帶跑偏檢測算法模型
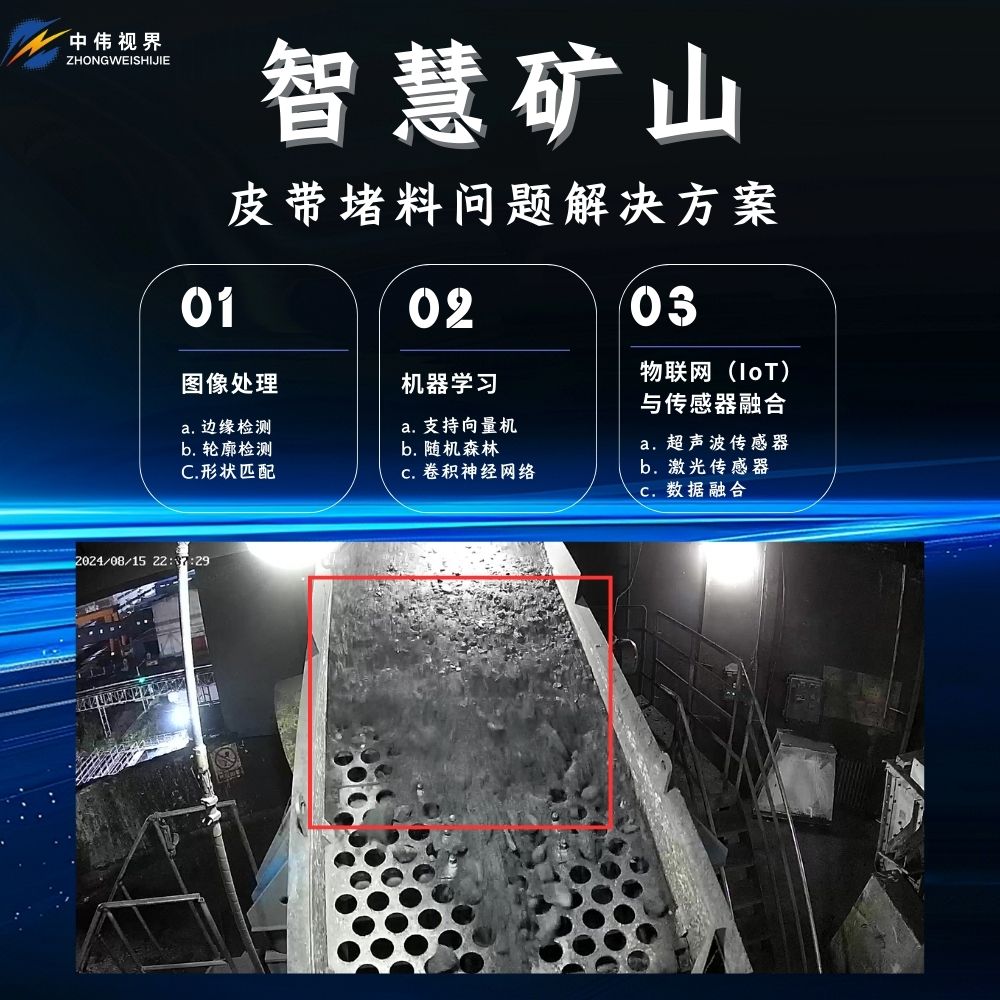
1.圖像處理算法
圖像處理算法通過在皮帶上方適當(dāng)位置安裝攝像機(jī),實(shí)時監(jiān)測皮帶邊緣與托輥外沿的參考距離。主要的圖像處理算法包括:
a. 邊緣檢測算法: 使用邊緣檢測算法(如Canny邊緣檢測)識別皮帶邊緣和托輥邊緣。通過計算皮帶邊緣與托輥外沿的距離,可以判斷皮帶是否發(fā)生跑偏。
b. 輪廓檢測算法: 利用輪廓檢測算法(如OpenCV中的findContours函數(shù)),提取皮帶和托輥的輪廓,通過分析輪廓的位置變化來檢測跑偏情況。
c. 形狀匹配算法: 通過模板匹配(Template Matching)技術(shù),將預(yù)設(shè)的皮帶和托輥正常狀態(tài)的圖像模板與實(shí)時圖像進(jìn)行比對,檢測是否發(fā)生跑偏。
機(jī)器學(xué)習(xí)算法通過訓(xùn)練模型來識別和預(yù)測皮帶跑偏情況。常用的機(jī)器學(xué)習(xí)算法包括:
a. 支持向量機(jī)(SVM): 利用SVM對皮帶跑偏的特征數(shù)據(jù)進(jìn)行分類,通過訓(xùn)練正常狀態(tài)和跑偏狀態(tài)的數(shù)據(jù),建立分類模型,實(shí)現(xiàn)實(shí)時檢測。
b. 隨機(jī)森林(Random Forest): 隨機(jī)森林通過構(gòu)建多棵決策樹,進(jìn)行皮帶狀態(tài)的預(yù)測和分類。該算法具有高準(zhǔn)確率和魯棒性,適用于復(fù)雜環(huán)境下的跑偏檢測。
c. 神經(jīng)網(wǎng)絡(luò)(Neural Networks): 深度神經(jīng)網(wǎng)絡(luò)(如卷積神經(jīng)網(wǎng)絡(luò),CNN)通過對大量圖像數(shù)據(jù)的訓(xùn)練,能夠自動提取和識別皮帶跑偏特征,實(shí)現(xiàn)高精度的檢測。
3.物聯(lián)網(wǎng)(IoT)與傳感器融合算法
結(jié)合物聯(lián)網(wǎng)技術(shù)和傳感器數(shù)據(jù),實(shí)現(xiàn)多維度的皮帶跑偏檢測。主要算法包括:
a. 數(shù)據(jù)融合算法: 通過融合攝像機(jī)圖像數(shù)據(jù)和傳感器數(shù)據(jù)(如位移傳感器、加速度傳感器),綜合判斷皮帶是否跑偏。數(shù)據(jù)融合算法可以提高檢測的準(zhǔn)確性和穩(wěn)定性。
b. 時序分析算法: 利用時序分析算法(如ARIMA模型),對傳感器數(shù)據(jù)進(jìn)行時間序列分析,預(yù)測皮帶跑偏趨勢,并提前預(yù)警。
二、皮帶跑偏判斷方法
1.距離判斷法
根據(jù)畫面實(shí)時監(jiān)測皮帶邊緣與托輥外沿的參考距離,檢測相鄰三架托輥與皮帶的距離。當(dāng)皮帶與托輥的距離發(fā)生變化并達(dá)到預(yù)設(shè)的跑偏警戒值時,系統(tǒng)判斷皮帶發(fā)生跑偏。
2.角度判斷法
通過安裝角度傳感器或利用圖像分析技術(shù),測量皮帶與托輥之間的角度變化。當(dāng)角度超過預(yù)設(shè)的警戒值并持續(xù)一定時間時,系統(tǒng)發(fā)出跑偏警報。
3.形狀變形判斷法
利用圖像處理技術(shù),監(jiān)測皮帶形狀的變形情況。當(dāng)皮帶形狀發(fā)生異常變形,達(dá)到預(yù)設(shè)的警戒值時,系統(tǒng)判斷為皮帶跑偏,并發(fā)出報警。
4.邊緣偏移判斷法
通過邊緣檢測技術(shù),測量皮帶邊緣的位置變化。當(dāng)皮帶邊緣偏移超過預(yù)設(shè)的警戒值并持續(xù)一定時間時,系統(tǒng)發(fā)出跑偏警報。
5.輪廓匹配判斷法
利用輪廓檢測和匹配算法,對比實(shí)時圖像和正常狀態(tài)的輪廓模板。當(dāng)輪廓偏移超過預(yù)設(shè)的警戒值時,系統(tǒng)判斷皮帶發(fā)生跑偏,并進(jìn)行報警。
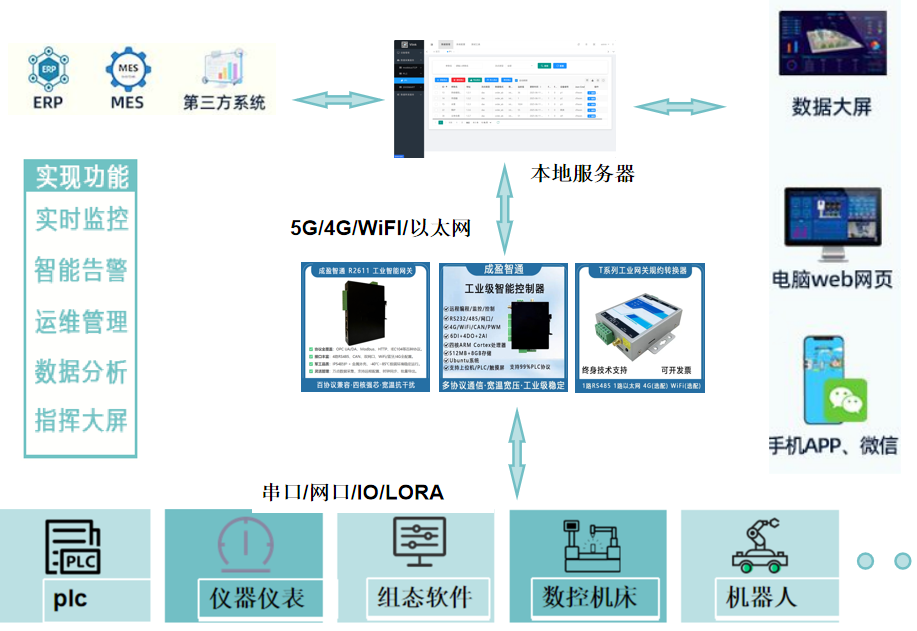
三、皮帶跑偏檢測系統(tǒng)的實(shí)現(xiàn)
為了實(shí)現(xiàn)上述算法模型和判斷方法,皮帶跑偏檢測系統(tǒng)通常由以下幾個部分組成:
1.圖像采集模塊
在皮帶的上方適當(dāng)位置安裝高清攝像機(jī),實(shí)時采集皮帶和托輥的圖像。攝像機(jī)的分辨率和幀率需要滿足實(shí)時監(jiān)測的要求,確保圖像清晰、無延遲。
2.圖像處理模塊
利用圖像處理算法,對采集到的圖像進(jìn)行預(yù)處理,包括去噪、增強(qiáng)、邊緣檢測、輪廓提取等步驟。預(yù)處理后的圖像數(shù)據(jù)將作為輸入,進(jìn)行進(jìn)一步分析和處理。
3.特征提取模塊
通過特征提取算法,識別和提取皮帶邊緣、托輥外沿等關(guān)鍵特征點(diǎn)。特征提取的準(zhǔn)確性直接影響跑偏檢測的效果,因此需要選用高效、魯棒的特征提取算法。
4.判斷模塊
基于提取的特征數(shù)據(jù),利用距離判斷法、角度判斷法、形狀變形判斷法、邊緣偏移判斷法等方法,對皮帶是否跑偏進(jìn)行綜合判斷。判斷模塊需要考慮多種因素,確保檢測結(jié)果的準(zhǔn)確性和可靠性。
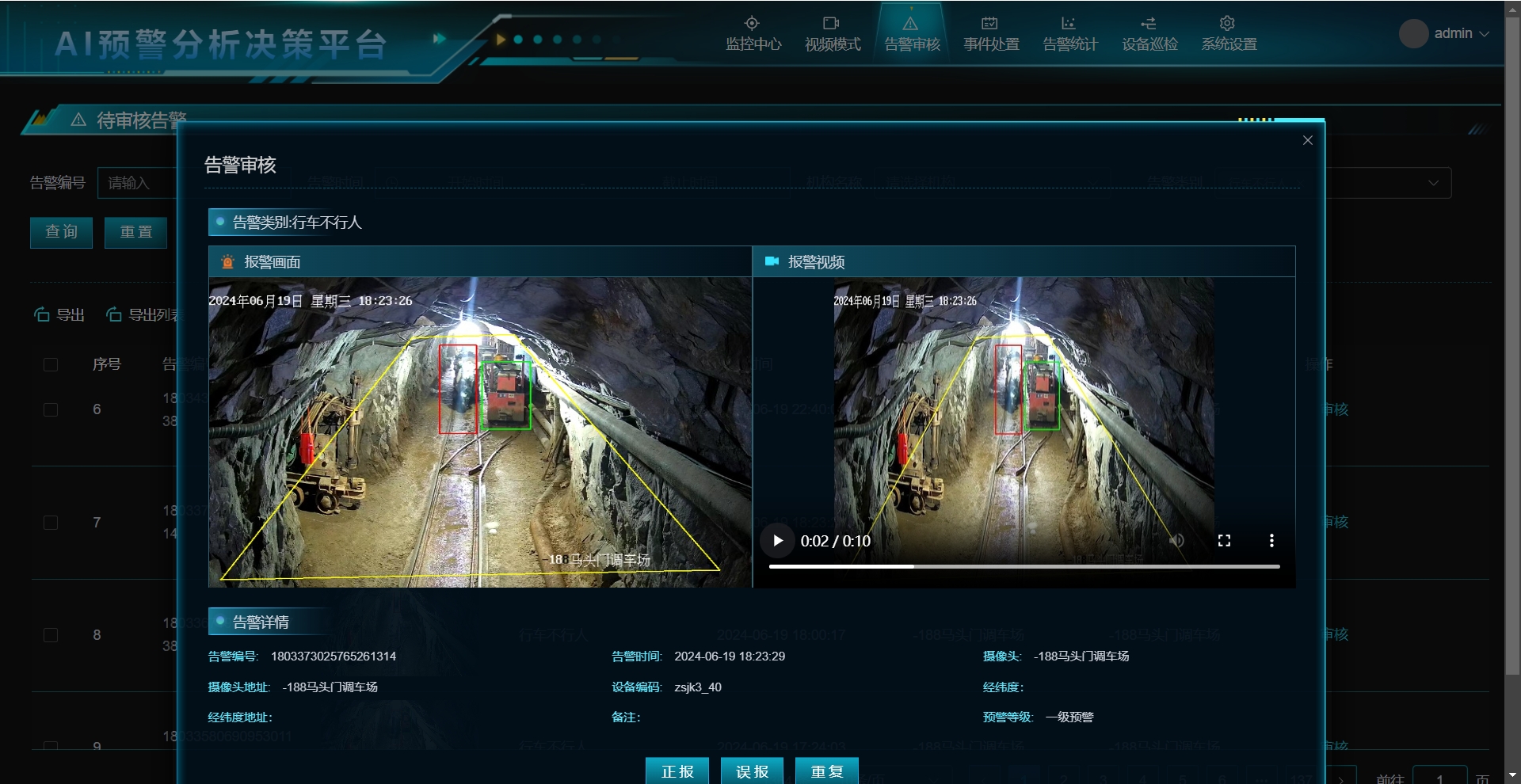
5.報警模塊
當(dāng)判斷模塊檢測到皮帶跑偏并達(dá)到預(yù)設(shè)的警戒值時,報警模塊會立即發(fā)出警報。報警方式可以通過聲音警報、短信通知、監(jiān)控平臺彈窗等多種形式,確保相關(guān)人員及時響應(yīng)。
6.數(shù)據(jù)存儲與分析模塊
將檢測結(jié)果、報警記錄、圖像數(shù)據(jù)等信息存儲在數(shù)據(jù)庫中,供后續(xù)分析和審查。通過對歷史數(shù)據(jù)的分析,可以發(fā)現(xiàn)潛在的安全隱患,優(yōu)化皮帶輸送系統(tǒng)的運(yùn)行管理。
四、應(yīng)用案例分析
以某礦山企業(yè)為例,該企業(yè)在皮帶輸送系統(tǒng)中安裝了皮帶跑偏檢測系統(tǒng)。具體實(shí)施效果如下:
1.系統(tǒng)安裝與調(diào)試
在皮帶輸送機(jī)的上方適當(dāng)位置安裝高清攝像機(jī),確保攝像機(jī)覆蓋所有關(guān)鍵區(qū)域,并連接到中央控制系統(tǒng)。攝像機(jī)通過光纖網(wǎng)絡(luò)傳輸視頻數(shù)據(jù),保證實(shí)時性和穩(wěn)定性。
2.實(shí)時監(jiān)測與預(yù)警
系統(tǒng)通過中央控制平臺對皮帶輸送機(jī)的實(shí)時圖像進(jìn)行分析和處理。當(dāng)檢測到皮帶跑偏時,系統(tǒng)立即發(fā)出預(yù)警,并通過聲音警報、短信通知、監(jiān)控平臺彈窗等方式提醒相關(guān)人員。
3.報警與響應(yīng)
當(dāng)皮帶跑偏報警觸發(fā)后,現(xiàn)場操作人員和管理人員會根據(jù)預(yù)警信息迅速采取措施,調(diào)整皮帶位置或停機(jī)檢查,防止跑偏進(jìn)一步惡化或引發(fā)設(shè)備損壞和安全事故。
4.數(shù)據(jù)記錄與分析
系統(tǒng)自動記錄所有的報警事件和相關(guān)圖像數(shù)據(jù),存儲在云端數(shù)據(jù)庫中。管理人員可以通過數(shù)據(jù)分析工具,對歷史數(shù)據(jù)進(jìn)行分析,發(fā)現(xiàn)和改進(jìn)潛在的安全隱患,優(yōu)化系統(tǒng)運(yùn)行管理。
5.效果評估
通過系統(tǒng)的實(shí)時監(jiān)測和預(yù)警,該礦山企業(yè)的皮帶跑偏事件明顯減少,設(shè)備故障率和維護(hù)成本也有所降低。同時,系統(tǒng)的報警記錄和數(shù)據(jù)分析為管理決策提供了重要參考,提升了整體安全管理水平。
五、技術(shù)特點(diǎn)分析
皮帶跑偏檢測系統(tǒng)具有以下技術(shù)特點(diǎn):
1.高精度檢測
利用高清攝像機(jī)和先進(jìn)的圖像處理算法,系統(tǒng)能夠高精度地識別皮帶邊緣和托輥外沿的距離變化,確保跑偏檢測的準(zhǔn)確性。
2.實(shí)時性強(qiáng)
系統(tǒng)能夠?qū)崟r采集和處理圖像數(shù)據(jù),確保在皮帶跑偏發(fā)生時立即發(fā)出預(yù)警,為操作人員爭取寶貴的響應(yīng)時間,防止事故發(fā)生。
3.多種判斷方法
系統(tǒng)綜合運(yùn)用距離判斷法、角度判斷法、形狀變形判斷法、邊緣偏移判斷法等多種判斷方法,提高檢測的魯棒性和可靠性,適應(yīng)不同的運(yùn)行環(huán)境和工況。
4.自動化程度高
系統(tǒng)能夠自動完成圖像采集、處理、特征提取、跑偏判斷和報警等全過程,無需人工干預(yù),大大減輕了安全管理的負(fù)擔(dān),提高了工作效率。
5.數(shù)據(jù)驅(qū)動管理
系統(tǒng)記錄和存儲了大量的監(jiān)測數(shù)據(jù),通過數(shù)據(jù)分析工具,管理者可以發(fā)現(xiàn)和改進(jìn)潛在的安全隱患,制定科學(xué)的管理決策,提升系統(tǒng)的運(yùn)行管理水平。
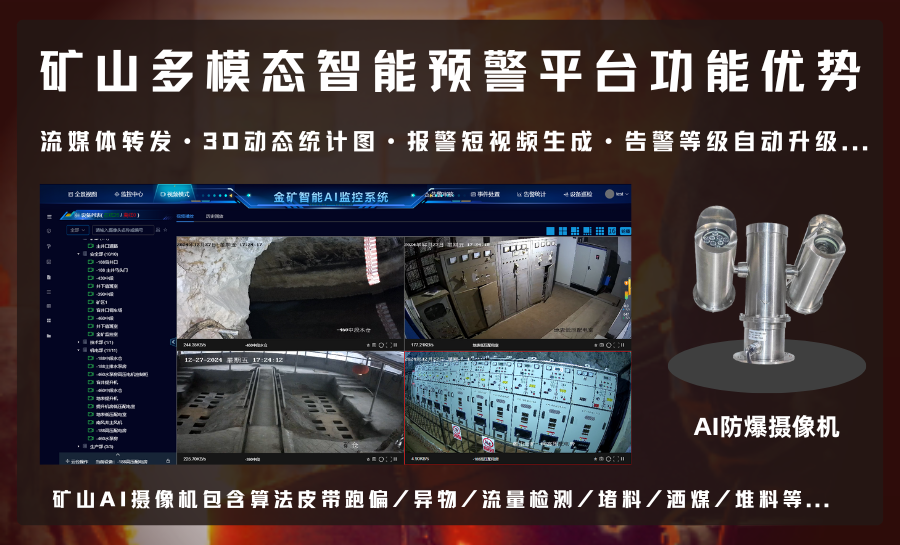
中偉視界礦山版分析服務(wù)器、AI盒子、IPC包含的算法有:皮帶跑偏、皮帶?異物、皮帶撕裂、皮帶劃痕、皮帶運(yùn)行狀態(tài)識別(啟停狀態(tài))、運(yùn)輸帶有無煤識別、煤流量檢測、運(yùn)輸帶坐人檢測、行車不行人、罐籠超員、靜止超時、搖臺是否到位、入侵檢測、下料口堵料、運(yùn)輸帶空載識別、井下堆料、提升井堆煤檢測、提升井殘留檢測、瓦斯傳感器識別、猴車長物件檢測、佩戴自救器檢測、風(fēng)門監(jiān)測、運(yùn)料車通行識別、工作面刮板機(jī)監(jiān)測、掘進(jìn)面敲幫問頂監(jiān)控、護(hù)幫板支護(hù)監(jiān)測、人員巡檢、入侵檢測、區(qū)域超員預(yù)警、未戴安全帽檢測、未穿工作服識別、火焰檢測、離崗睡崗識別、倒地檢測、攝像機(jī)遮擋識別、攝像機(jī)挪動識別等等算法。
審核編輯 黃宇
-
檢測算法
+關(guān)注
關(guān)注
0文章
122瀏覽量
25494
發(fā)布評論請先 登錄
工業(yè)皮帶跑偏報警智能數(shù)據(jù)采集方案:低成本部署賦能設(shè)備安全運(yùn)行與效率提升
中偉視界:智能化皮帶異物檢測技術(shù)在礦業(yè)中的創(chuàng)新應(yīng)用
提供半導(dǎo)體工藝可靠性測試-WLR晶圓可靠性測試
保障汽車安全:PCBA可靠性提升的關(guān)鍵要素
中偉視界:解密AI智能攝像機(jī)算法,讓傳送帶跑偏檢測更高效!

中偉視界:流媒體技術(shù)與礦山安全需求的深度融合,推動礦山預(yù)警平臺的智能化升級
中偉視界:礦山多模態(tài)預(yù)警平臺如何結(jié)合AI攝像頭實(shí)現(xiàn)皮帶輸送機(jī)空載識別
中偉視界:皮帶異物識別AI攝像頭,安全生產(chǎn)的智能化轉(zhuǎn)型
中偉視界:非煤礦山智能化改造解決方案

智慧礦山:輸煤皮帶數(shù)字孿生管控系統(tǒng)

中偉視界:礦山罐籠乘員安全監(jiān)測系統(tǒng)防止礦山事故
中偉視界:AI邊端云一體化平臺的智能化全流程解析
中偉視界:皮帶堵料監(jiān)測AI算法、檢測方法與理論依據(jù)
中偉視界:礦山智能化安全生產(chǎn),未戴自救器檢測AI算法助力保護(hù)作業(yè)人員安全

中偉視界:礦山智能化——實(shí)時檢測識別井下行人車輛,人工智能賦能高風(fēng)險作業(yè)安全





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論