") 使用NVIDIA Isaac的新型仿真方法推進機器人裝配
使用NVIDIA Isaac的新型仿真方法推進機器人裝配
NVIDIA 機器人技術(shù)和仿真研究人員在 2022 年機器人技術(shù):科學(xué)與系統(tǒng)( RSS )會議上介紹了 工廠:機器人裝配的快速接觸 。這項工作是機器人研究中普遍存在的接觸豐富交互的模擬和學(xué)習方面的一個新突破。其目的是大大加快機器人裝配的研究和開發(fā),并作為一個強大的工具,用于任何類型的接觸豐富的仿真。
機器人裝配:什么、為什么和挑戰(zhàn)
裝配在汽車、航空航天、電子和醫(yī)療行業(yè)中至關(guān)重要。示例包括擰緊螺母和螺栓、焊接、插銷和電纜布線。
然而,機器人裝配仍然是機器人技術(shù)中最古老、最具挑戰(zhàn)性的任務(wù)之一。由于物理復(fù)雜性、高可靠性、零件可變性和高精度要求,自動化變得異常困難。
在工業(yè)中,機器人裝配方法可能實現(xiàn)高精度、高精度和高可靠性,但通常需要昂貴的設(shè)備和定制夾具,這些設(shè)備和夾具的設(shè)置和維護非常耗時(例如,預(yù)編程軌跡和仔細調(diào)整)。涉及對變化(零件類型、外觀和位置)魯棒性和復(fù)雜操作的任務(wù)通常使用人工完成。
研究方法可以實現(xiàn)更低的成本、更高的自適應(yīng)性和更好的魯棒性,但通常可靠性較低,速度較慢。
仿真:解決機器人裝配挑戰(zhàn)的工具
幾十年來,仿真一直用于驗證、驗證和優(yōu)化機器人設(shè)計和算法。這包括確保部署這些算法的安全性。它還被用于生成用于深度學(xué)習的大規(guī)模數(shù)據(jù)集,執(zhí)行系統(tǒng)識別,以及開發(fā)規(guī)劃和控制方法。
在強化學(xué)習( RL )研究中,我們最近看到了如何將仿真結(jié)果轉(zhuǎn)移到真實系統(tǒng)。精確的物理模擬對于機器人發(fā)展的重要性無論怎樣強調(diào)都不為過。
基于物理的模擬器,如 MuJoCo 和 NVIDIA ISAAC Gym 已用于訓(xùn)練虛擬代理執(zhí)行操作和移動任務(wù),例如求解魔方或使用 ANYmal 在不平坦地形上行走。這些政策已經(jīng)成功地轉(zhuǎn)移到現(xiàn)實世界的機器人上。
然而,快速準確的模擬器的能力并沒有對機器人裝配產(chǎn)生實質(zhì)性影響。為具有不同變化和運動的復(fù)雜物體開發(fā)此類模擬器是一項困難的任務(wù)。
例如,一個簡單的螺母和螺栓組件需要的不僅僅是純螺旋運動。螺母和螺栓的螺紋之間有有限間隙,允許螺母以六個自由度移動。即使是人類也需要一定程度的小心,以確保螺母與螺栓具有適當?shù)某跏紝剩⑶以跀Q緊過程中不會卡住。
然而,用傳統(tǒng)方法模擬任務(wù)可能需要使用數(shù)萬個三角形的網(wǎng)格。檢測這些網(wǎng)格之間的碰撞、生成接觸點和法線以及求解非穿透約束是主要的計算挑戰(zhàn)。
盡管世界上有大量的螺紋緊固件,但沒有任何現(xiàn)有的機器人模擬器能夠以與基本物理動力學(xué)相同的速率實時模擬單個螺母和螺栓組件。
在工廠里,研究人員開發(fā)了一些方法來克服機器人裝配和其他接觸豐富的交互中的挑戰(zhàn)。
什么是工廠?
Factory (機器人裝配的快速接觸)是一套物理模擬方法和機器人學(xué)習工具,用于實現(xiàn)廣泛接觸豐富交互的實時和快速模擬。工廠應(yīng)用之一是機器人裝配。
工廠提供以下核心貢獻:
一套 methods ,用于通過基于 GPU 的符號距離函數(shù)( SDF )碰撞合成、接觸減少和高斯 – 賽德爾解算器,快速、準確地物理模擬富含接觸的相互作用。
機器人學(xué)習套件 包括:
60 項高質(zhì)量資產(chǎn),包括一臺 Franka 機器人和 NIST 裝配任務(wù)委員會 1 的所有剛體裝配, NIST 裝配任務(wù)委員會 1 是機器人裝配的既定基準
用于機器人裝配的三種 ISAAC 健身房式學(xué)習環(huán)境
七種經(jīng)典機器人控制器
概念驗證強化學(xué)習策略 用于執(zhí)行接觸豐富任務(wù)的機器人(模擬 Franka 機器人在 NIST 板、螺母和螺栓組件上解決最多接觸豐富任務(wù))
工廠論文中的物理模擬方法已集成到 ISAAC Gym 使用的 PhysX 物理引擎中。最新版本的 ISAAC Gym 和 ISAAC Gym 環(huán)境 GitHub 回購。 Omniverse ISAAC Sim 模擬器中也提供了模擬方法,今年夏天晚些時候?qū)⑻峁娀瘜W(xué)習示例。
模擬方法和結(jié)果
使用基于 GPU 的物體 SDF 碰撞快速實現(xiàn)、用于減少 SDF 碰撞接觸的接觸減少算法和自定義數(shù)值求解器,研究人員不僅能夠?qū)崟r模擬單個 M16 螺母和螺栓,而且能夠在并行環(huán)境中實時模擬 1024 個。這基本上比現(xiàn)有技術(shù)快 200000 倍。
研究人員演示了模擬器在各種具有挑戰(zhàn)性的場景中的性能,包括以下場景:
512 個碗在同一環(huán)境中落成一堆
一堆螺母被送入進料器機構(gòu),以 60 Hz 的頻率振動
Franka 機器人執(zhí)行手動腳本軌跡以抓取螺母并將其擰緊到螺栓上,該環(huán)境的 128 個實例實時執(zhí)行
機器人學(xué)習工具
機器人裝配最為成熟的基準是 NIST 裝配任務(wù)委員會 ,自 2017 年以來,這是年度機器人競賽的焦點。 NIST 任務(wù)委員會 1 由 38 個獨特部分組成。然而,由于缺乏真實的間隙、零件之間的干涉、手動測量等,所提供的 CAD 模型并不適合物理模擬。現(xiàn)實的模型很難找到。
工廠使用 60 個高質(zhì)量、模擬就緒的零件模型,每個模型具有一個 Onshape CAD 模型、一個或多個 OBJ 網(wǎng)格、 URDF 描述和符合國際標準( ISO 724 、 ISO 965 和 ISO 286 )或基于制造商提供的模型的估計材料特性。這些模型包括 NIST 裝配任務(wù)委員會 1 上的所有零件,其尺寸變化跨越真實世界的公差帶。零件之間的間隙范圍從 0 到最大 2.66 mm ,許多零件在 0.1-0.5 mm 范圍內(nèi)。
工廠為 ISAAC 健身房提供了三個機器人裝配場景,可用于開發(fā)規(guī)劃和控制算法、收集模擬傳感器數(shù)據(jù)以進行監(jiān)督學(xué)習以及訓(xùn)練 RL 代理。每個場景都包含一個 Franka 機器人和 NIST 任務(wù)板 1 中分解的組件。
資產(chǎn)可以在所有環(huán)境中的類型和位置上隨機化。所有場景都在 NVIDIA RTX 3090 GPU 上進行了多達 128 個同時環(huán)境的測試。場景如下:
學(xué)習環(huán)境中可用的七個機器人控制器包括關(guān)節(jié)空間逆微分運動學(xué)( IK )運動控制器、關(guān)節(jié)空間逆動力學(xué)( ID )控制器、任務(wù)空間阻抗控制器、操作空間運動控制器、開環(huán)力控制器、閉環(huán)比例力控制器和混合力運動控制器。
研究人員希望模型、環(huán)境和控制器隨著他們和社區(qū)的貢獻而不斷增長。
概念驗證 RL 政策
工廠采用 GPU 加速策略 RL 來解決 NIST 任務(wù)板 1 上接觸最多的任務(wù):將螺母組裝到螺栓上。像許多裝配任務(wù)一樣,這樣的過程是一個漫長的過程,并且很難進行端到端的學(xué)習。問題分為三個階段:
拾取:機器人從工作表面上的隨機位置用平行鉗口抓取螺母。
位置:機器人將螺母運輸?shù)焦潭ㄔ诒砻娴穆菟敳俊?/p>
螺釘:機器人使螺母與螺栓接觸,嚙合配合螺紋,并擰緊螺母,直到其接觸螺栓頭的底座。
培訓(xùn)在單個 GPU 上完成。對對象的初始位置和方向應(yīng)用大隨機性,同時使用近端策略優(yōu)化( PPO )訓(xùn)練一批 3-4 個策略。每個批次需要 1-1.5 小時的訓(xùn)練,每個子策略在 128 多個環(huán)境中進行訓(xùn)練,最多 1024 個策略更新用于快速實驗。試驗時的成功率為 98.4% 。
最后,為了評估模擬到真實傳輸?shù)臐摿Γ▽⒃谀M中學(xué)習到的策略傳輸?shù)秸鎸嵤澜绲臋C器人系統(tǒng)),研究人員將在模擬中這些交互過程中產(chǎn)生的接觸力與在真實世界中使用扳手執(zhí)行相同任務(wù)的人測得的接觸力進行了比較。有關(guān)更多信息,請參閱 R-PAL 日常交互操作( DIM )數(shù)據(jù)集 。
下圖顯示,模擬緊固螺母的直方圖位于真實緊固螺母直方圖的中間,這表明與真實值具有很強的一致性。
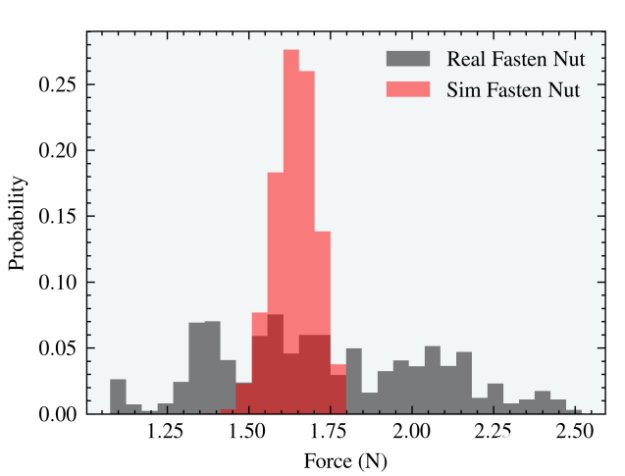
圖 螺釘子策略執(zhí)行期間的模擬接觸力與 每日交互式操作( DIM )數(shù)據(jù)集 中的模擬真實接觸力的比較
結(jié)論和未來方向
雖然 Factory 開發(fā)時將機器人裝配作為一種激勵應(yīng)用,但在機器人內(nèi)使用這些方法執(zhí)行完全不同的任務(wù)沒有限制,例如在家庭環(huán)境中抓取復(fù)雜的非凸形狀,在不平坦的室外地形上移動,以及對物體集合進行不可抓取的操作。
這項工作的未來方向是實現(xiàn)復(fù)雜物理交互的完整端到端仿真,包括有效地將訓(xùn)練好的策略轉(zhuǎn)移到真實機器人系統(tǒng)的技術(shù)。這可能會將成本和風險降至最低,提高安全性,并實現(xiàn)高效行為。
有朝一日,每一個先進的工業(yè)制造機器人都可能會使用這些技術(shù)進行模擬訓(xùn)練,以便無縫地轉(zhuǎn)移到現(xiàn)實世界中。
為此, NVIDIA 開發(fā)人員正在努力完善工廠研究所使用的物理模擬方法,以便可以在 Omniverse ISAAC Sim 中使用。有限的功能已經(jīng)存在,并將隨著時間的推移變得更加強大。
關(guān)于作者:
Oyindamola Omotuyi 是 NVIDIA 的產(chǎn)品營銷經(jīng)理實習生,專注于機器人開發(fā)社區(qū)。在之前的 NVIDIA 實習期間,她撰寫了 NVIDIA 對話 AI 電子書的介紹。 Oyindamola Omotuyi 擁有尼日利亞拉各斯大學(xué)系統(tǒng)工程學(xué)士學(xué)位和辛辛那提大學(xué)機械工程碩士學(xué)位。她目前正在辛辛那提大學(xué)攻讀博士學(xué)位,專注于多智能體深度強化學(xué)習和機器人感知。
審核編輯:郭婷
-
機器人
+關(guān)注
關(guān)注
213文章
29475瀏覽量
211529 -
NVIDIA
+關(guān)注
關(guān)注
14文章
5238瀏覽量
105761
發(fā)布評論請先 登錄
NVIDIA Isaac Sim與NVIDIA Isaac Lab的更新
NVIDIA 通過云端至機器人計算平臺驅(qū)動人形機器人技術(shù),賦能物理 AI

盤點#機器人開發(fā)平臺
NVIDIA Isaac 是英偉達推出的綜合性機器人開發(fā)平臺
NVIDIA Isaac GR00T N1開源人形機器人基礎(chǔ)模型+開源物理引擎Newton加速機器人開發(fā)
智元機器人基于NVIDIA Isaac GR00T打造高效仿真數(shù)據(jù)采集方案

簡述NVIDIA Isaac的重要更新

NVIDIA發(fā)布Isaac GR00T Blueprint,加速人形機器人開發(fā)
NVIDIA發(fā)布人形機器人重磅更新!Isaac GR00T Blueprint厲害在哪?

物理仿真人形機器人的統(tǒng)一全身控制策略

NVIDIA通過加速AWS上的機器人仿真推進物理AI的發(fā)展
利用NVIDIA Isaac平臺構(gòu)建、設(shè)計并部署機器人應(yīng)用

NVIDIA 加速人形機器人發(fā)展

NVIDIA Isaac 機器人平臺利用最新的生成式 AI 和先進的仿真技術(shù),加速 AI 機器人技術(shù)的發(fā)展






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論