") 最早的波士頓動(dòng)力機(jī)器狗ASV介紹
最早的波士頓動(dòng)力機(jī)器狗ASV介紹
這個(gè) 3 米高的龐然大物誕生于 80 年代,比波士頓動(dòng)力機(jī)器狗還早 20 多年。
前段時(shí)間,波士頓動(dòng)力機(jī)器狗 Spot 正式開(kāi)售,而且已經(jīng)有買(mǎi)家曬出了首個(gè)開(kāi)箱視頻。波士頓動(dòng)力機(jī)器狗項(xiàng)目由美國(guó)國(guó)防高等研究計(jì)劃局(DARPA)資助,初衷是研制一種能夠負(fù)重的機(jī)械騾,和士兵一起在傳統(tǒng)機(jī)械車輛無(wú)法行駛的粗糙地形上作戰(zhàn)。2005 年,Spot 的前輩——「Big Dog」機(jī)器狗的發(fā)布讓波士頓動(dòng)力聲名遠(yuǎn)播。
波士頓動(dòng)力發(fā)布的「Big Dog」機(jī)器狗。 但很多人不知道的是,波士頓動(dòng)力 Spot 其實(shí)并不是 DAPRA 資助最早的「機(jī)器狗」,一個(gè)名為「ASV」的項(xiàng)目比它還要早二十多年。 ASV 是一個(gè)身高 3 米、體長(zhǎng) 5.18 米的龐然大物,寬度也達(dá)到了 2.4 米,相當(dāng)于一輛卡車,所以有媒體將其稱為「行走的卡車」。
波士頓動(dòng)力機(jī)器狗:「這是我爸?」 這么個(gè)大家伙走起路來(lái)也是相當(dāng)威風(fēng)的:
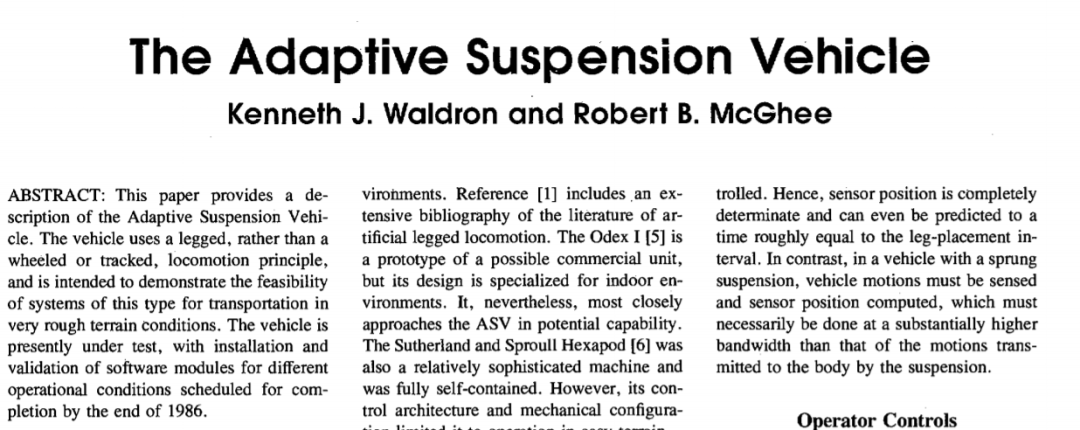
這個(gè)項(xiàng)目始于 1981 年 1 月,由 DARPA 出資、俄亥俄州立大學(xué)的兩位教授 Robert McGhee 和 Kenneth Waldron 負(fù)責(zé)打造。項(xiàng)目的初衷是想造出一款足式機(jī)器人,在坦克履帶無(wú)法行進(jìn)的地形中完成任務(wù)。
和波士頓動(dòng)力 Spot 不同的是,ASV 里面還坐了一名操作員,在某些情況下手動(dòng)操作機(jī)器的六條腿:
為了減輕操作員在操作過(guò)程中花費(fèi)的體力和腦力,這個(gè)龐然大物體內(nèi)安裝了 17 臺(tái)計(jì)算機(jī)。 按照今天的標(biāo)準(zhǔn)來(lái)看,這些計(jì)算機(jī)其實(shí)是很簡(jiǎn)陋的。機(jī)器人肩膀上那 6 個(gè)笨重的矩形盒子其實(shí)就是計(jì)算機(jī)所在的位置,每個(gè)盒子里都裝了一臺(tái)英特爾 "86/30" 128k, 8-bit 計(jì)算機(jī),用來(lái)控制機(jī)器人的腿部運(yùn)動(dòng)。
其余的 11 臺(tái)計(jì)算機(jī)各自負(fù)責(zé)不同的任務(wù),比如控制操作員座艙內(nèi)的 CRT 顯示器、分析腿部以及腳上的壓力傳感器收集到的數(shù)據(jù)、根據(jù)座艙里的 128x128 像素掃描測(cè)距儀的數(shù)據(jù)確定最佳落腳點(diǎn)等。所有這些數(shù)據(jù)都由操作軟件來(lái)解讀,該軟件是用 Pascal 寫(xiě)的,包含 15 萬(wàn)行源代碼。而這些代碼的任務(wù)只有一個(gè):讓 ASV 漫步。 在座艙里,操作員借助按鍵和操縱桿控制 ASV 的行走路線。
兩位教授曾在一篇論文中提到,ASV 的最終目標(biāo)是實(shí)現(xiàn)自主行走。但最終,這個(gè)目標(biāo)沒(méi)能實(shí)現(xiàn)。當(dāng)然,錢(qián)不是問(wèn)題,這個(gè)項(xiàng)目每年都能從 DARPA 那里拿到 100 萬(wàn)美元的資助,真正的限制條件是當(dāng)時(shí)計(jì)算機(jī)的處理能力。
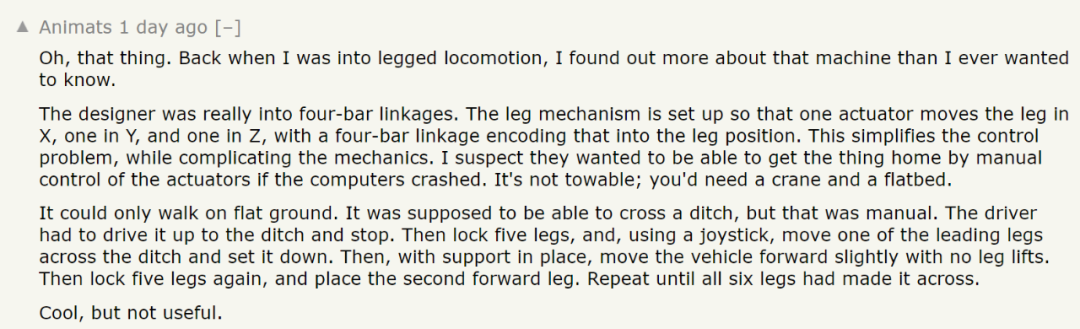
其實(shí),那些錢(qián)不止花在了計(jì)算機(jī)上,整個(gè) ASV 的機(jī)械系統(tǒng)也很復(fù)雜。 ASV 的核心位置安裝了一個(gè) 900cc 的摩托車引擎,峰值輸出可以達(dá)到 91 馬力,但它不止為一個(gè)巨大的液壓泵提供動(dòng)力。在該引擎和 18 個(gè)可變排量泵(用于驅(qū)動(dòng) ASV 的液壓缸)之間有一個(gè) 100 磅的飛輪,每分鐘可以轉(zhuǎn) 12000 轉(zhuǎn),存儲(chǔ) 0.25 kWh 的能量。這意味著,它可以在一小時(shí)內(nèi)輸出 250 瓦的電力。 這點(diǎn)非常有用,因?yàn)?ASV 的 18 個(gè)泵是由一個(gè)非常復(fù)雜的系統(tǒng)來(lái)驅(qū)動(dòng)的。引擎通過(guò)齒形傳送帶將動(dòng)力從輸出軸傳遞到三個(gè)獨(dú)立的傳動(dòng)軸上。這些裝置從前往后連接著整個(gè) ASV,然后通過(guò)更多的齒形傳送帶將動(dòng)力傳到泵上(每條腿 3 個(gè)泵)。 為了在這種高摩擦系統(tǒng)中完成高耗能動(dòng)作,ASV 需要的動(dòng)力要超出引擎所能提供的動(dòng)力。這種情況下,飛輪儲(chǔ)存的能量就派上了用場(chǎng)。當(dāng) ASV 突然停下來(lái)時(shí),飛輪可以幫助機(jī)器從泵中回收一些能量,確保在突然失去動(dòng)力的情況下平穩(wěn)地停下來(lái),類似于混合動(dòng)力汽車的再生制動(dòng)系統(tǒng)。 得益于這種復(fù)雜的驅(qū)動(dòng)系統(tǒng),ASV 的行進(jìn)速度最快可以達(dá)到 12.9km/h(相當(dāng)于普通人的中級(jí)慢跑)。雖然也不是很快,但以這個(gè)速度行進(jìn)時(shí),里面的人會(huì)感覺(jué)顛簸。而且,這個(gè)龐然大物重達(dá) 5952 磅(約 2699.8 千克),但有效荷載只有 485 磅(約 220 千克)。在種種因素制約下,ASV 的巡航速度控制在 6.4km/h 左右。 然而,緩慢的巡航速度限制了 ASV 的實(shí)用性。 由于體型比較大,ASV 可以越過(guò) 2 米多高的垂直障礙和 7 米多寬的戰(zhàn)壕,但緩慢的巡航速度限制了它的實(shí)用性。因此,DARPA 還是對(duì)這個(gè)項(xiàng)目失去了興趣,并于 1990 年將其徹底砍掉。 經(jīng)過(guò)了這么多年,ASV 已經(jīng)下落不明,有消息稱它被打包放在俄亥俄州立大學(xué)的某個(gè)地方,也有人猜測(cè)它可能在 DARPA 手里。 至于這個(gè)項(xiàng)目到底有沒(méi)有意義,目前還存在一些爭(zhēng)論。有位網(wǎng)友介紹說(shuō),這個(gè)大家伙可能只適合在平地行走。如果要跨越一道溝,操作員必須進(jìn)行手動(dòng)操作:先將五條腿鎖住,使用操縱桿將一條腿邁過(guò)去,然后用這條腿做支撐將身體往前挪,接著再鎖住五條腿將第二條腿邁過(guò)去并重復(fù)這個(gè)步驟,直到六條腿都邁過(guò)去。因此,ta 覺(jué)得這個(gè)東西沒(méi)什么用。
但也有人認(rèn)為,這個(gè)項(xiàng)目所踩的坑可以為之后的研究提供很多借鑒,錢(qián)花得不冤枉。

不過(guò)可以肯定的是,開(kāi)著這么一輛機(jī)器「卡車」在街上走肯定比遛波士頓動(dòng)力機(jī)器狗還拉風(fēng)。
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29482瀏覽量
211541 -
機(jī)器狗
+關(guān)注
關(guān)注
3文章
176瀏覽量
10446
原文標(biāo)題:這是波士頓動(dòng)力機(jī)器狗他爸?身高3米,人機(jī)聯(lián)合操作
文章出處:【微信號(hào):indRobot,微信公眾號(hào):工業(yè)機(jī)器人】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
全球首次!中國(guó)機(jī)器人原地側(cè)空翻,打破技術(shù)壁壘
小鵬最新人形機(jī)器人!首發(fā)自研芯片,模特身材加持,已進(jìn)廠打螺絲

NVIDIA 通過(guò)云端至機(jī)器人計(jì)算平臺(tái)驅(qū)動(dòng)人形機(jī)器人技術(shù),賦能物理 AI

機(jī)器人靈巧手進(jìn)入規(guī)模量產(chǎn)時(shí)刻!4款新品亮相

樹(shù)莓派遇上機(jī)器狗:科技界的“春晚明星”是怎樣煉成的?

TE推出SILVER 跨接式連接器產(chǎn)品介紹-赫聯(lián)電子
漢威科技柔性觸覺(jué)傳感器:為人形機(jī)器人裝上“中國(guó)觸覺(jué)”

發(fā)力機(jī)器人傳感器領(lǐng)域,華培動(dòng)力擬設(shè)立機(jī)器人全資子公司

波士頓機(jī)器人滑環(huán)的技術(shù)特點(diǎn)與應(yīng)用前景
波士頓動(dòng)力與RAI Institute聯(lián)手推進(jìn)人形機(jī)器人技術(shù)
1300套機(jī)器人大訂單來(lái)了
特朗普啟用帶激光雷達(dá)機(jī)器狗巡邏
安波福入選BCG“2024年最具創(chuàng)新力企業(yè)”
埃斯頓4.5億增資子公司,加速機(jī)器人產(chǎn)業(yè)布局
連做兩只機(jī)器狗,終于拿捏了這些算法……






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論