 使用單片機實現機器人設計的資料說明
使用單片機實現機器人設計的資料說明
1 引言
輪式移動機器人是機器人研究領域的一項重要內容.它集機械、電子、檢測技術與智能控制于一體。在各種移動機構中,輪式移動機構最為常見。輪式移動機構之所以得到廣泛的應用。主要是因為容易控制其移動速度和移動方向。因此.有必要研制一套完整的輪式機器人系統。并進行相應的運動規劃和控制算法研究。筆者設計和開發了基于5l型單片機的自動巡線輪式機器人控制系統。
2 控制系統總體設計
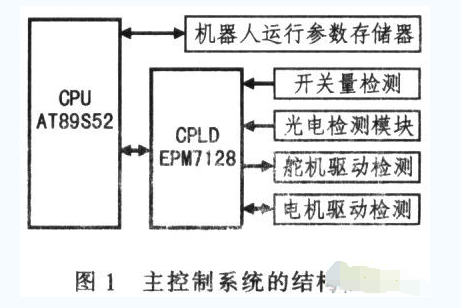
機器人控制系統由主控制電路模塊、存儲器模塊、光電檢測模塊、電機及舵機驅動模塊等部分組成,控制系統的框圖如圖1所示。
3 主控制模塊設計
3.1 CPLD設計
在機器人控制系統中.需要控制多個電動機和行程開關.還要進行光電檢測.如果所有的任務都由AT89S52型單片機來完成.CPU的負擔就會過重。影響系統的處理速度。因此擴展1個CPLD.型號為EPM7128。它屬于.MAX7000系列器件。包括2個通用1/0口.2個專用I/O口,專用I/O口可作為每個宏單元和輸入輸出引腳的高速控制信號(時鐘、清除和輸出使能等),電動機的。PWM信號也由其產生。
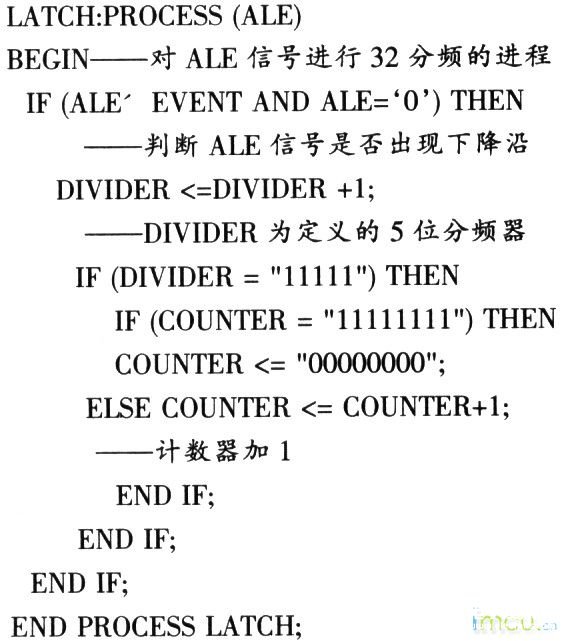
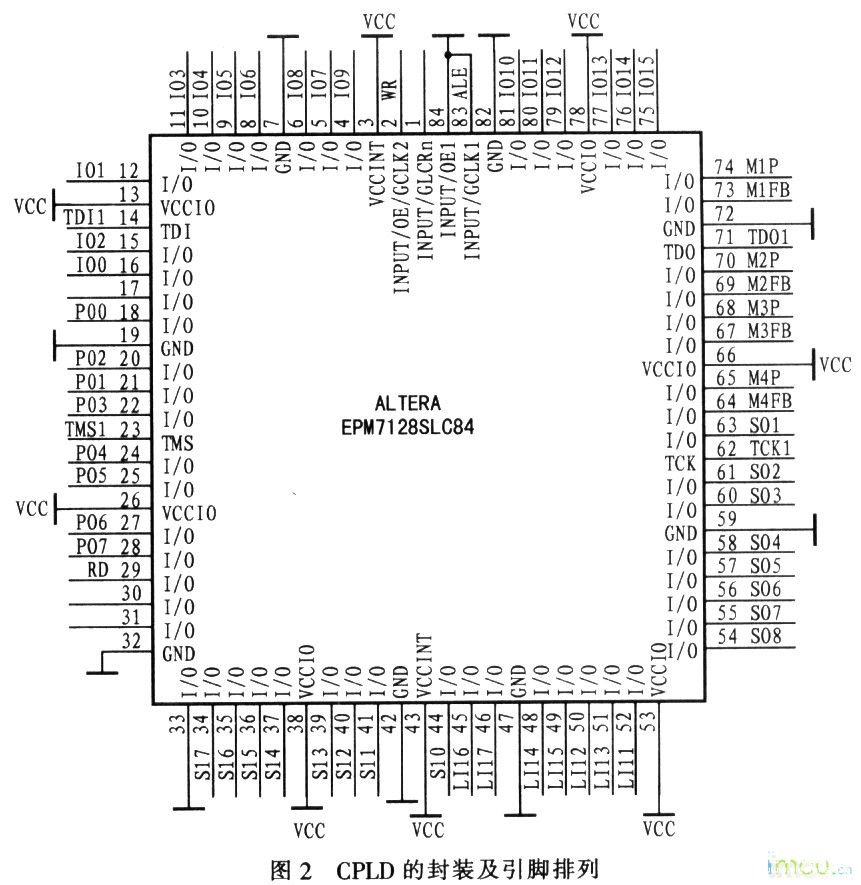
EPM7128的引腳排列如圖2所示。MlP—M4P引腳的輸出為PWM脈寬調制信號,M1FB—M4FB引腳為電機的方向控制信號,P00一P07接單片機的PO口,100一1015為擴展的2個通用I/O口,SIl—S17引腳為行程開關輸入信號,LI11一LI17引腳為光電探頭輸入信號。CPLD的編程用VHDL語言,產生1路PWM信號的部分程序源代碼如下:
單片機采用24MHz的晶體振蕩器,ALE信號的頻率fALE=f16=6MHz,最終輸出PWM信號的引腳MlP的頻率為:
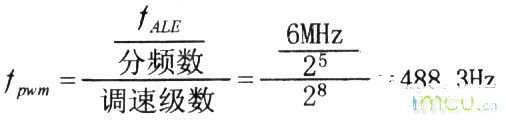
調節這個信號的占空比可以使直流電動機獲得O-255級的轉速。
3.2 機器人運行參數存儲器的擴展
機器人運行路徑和動作可以根據比賽情況的不同而發生變化,這樣,每改變1次運行參數就必須對單片機的Flash進行1次擦寫。為了解決這一問題.擴展了程序參數存儲器,用來存放機器人的運行路徑和動作參數.擴展電路如圖3所示。
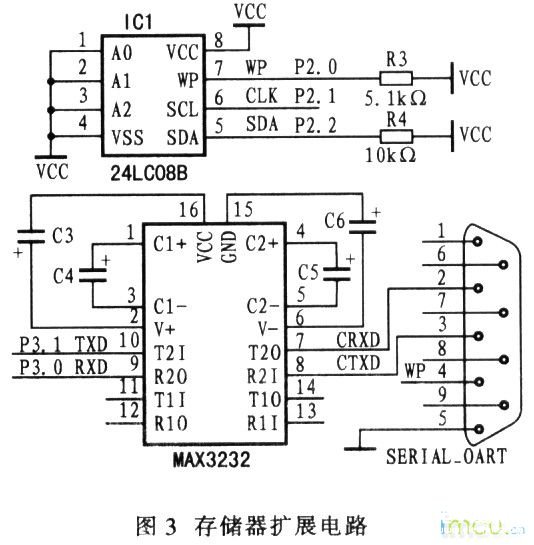
其中IC1為24LC08B,是I2E總線的串行E2PROM存儲器,最多能夠存儲lK字節的數據。IC2為MAX3232型電平轉換器,其內部有1個電源電壓變換器,可以將計算機的電平轉換為標準TTL電平,實現計算機與單片機之間通過串行口傳輸數據,使單片機完成對24/LC08B的數據存儲操作。單片機運行時,直接從24LC08中讀取機器人的運行參數,控制機器人運行。
4 光電檢測模塊設計
4.1 光電檢測過程
設計光電檢測模塊是為了讓機器人能夠檢測地面上的白色引導線。光電檢測電路主要包括發射部分和接收部分,其原理如圖4所示。
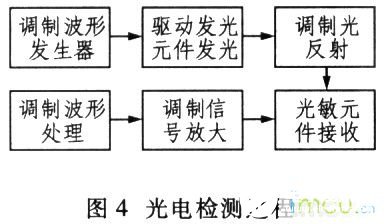
發射部分的波形調制采用了頻率調制方法。由于發光二極管的響應速度快,其工作頻率可達幾MHz或十幾MHz,而檢測系統的調制頻率在幾十至幾百kHz的范圍內,能夠滿足要求。光源驅動主要負責把調制波形放大到足夠的功率去驅動光源發光。光源采用紅外發光二極管,工作頻率較高,適合波形為方波的調制光的發射。
接收部分采用光敏二極管接收調制光線,將光信號轉變為電信號。這種電信號通常較微弱,需進行濾波和放大后才能進行處理。調制信號的放大采用交流放大的形式,可使調制光信號與背景光信號分離,為信號處理提供方便。調制信號處理部分對放大后的信號進行識別,判斷被檢測對象的特性。因此,此模塊的本質是將“交流”的、有用的調制光信號從“直流”的、無用的背景光信號中分離出來,從而達到抗干擾的目的。
4.2 光電探頭
光電探頭安裝在機器人底盤前部,共設置了5個檢測點。從理論上講,檢測點越多、越密,識別的準確性與可靠性就越高,但是硬件的開銷與軟件的復雜程度也相應的增加。采用該巡線系統保證了檢測的精確度,節約了硬件的開銷。發光二極管發出的調制光經地面反射到光敏二極管。光敏二極管產生的光電流隨反射光的強弱而線性變化。把這種變化檢測出來,就可以判斷某一個檢測點是否在白色引導線的上方,從而判斷機器人和白色引導線的相對位置。
5 電機驅動模塊
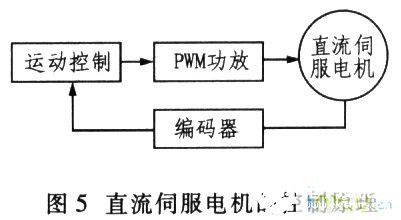
機器人的驅動件主要是電機和舵機,都可以采用PWM進行調速與控制。根據脈沖編碼器的反饋信號,對機器人的運動狀態進行實時控制。直流伺服電機的控制原理如圖5所示。調節:PWM的信號就能夠快速調節舵機的轉角,從而實現機器人的方向控制。
6 結束語
基于5l型單片機的自動巡線輪式機器人控制系統運行平穩可靠,抗干擾能力強,不僅滿足了機器人大賽的設計要求,同時也為智能機器人搭建了良好的控制平臺。
-
單片機
+關注
關注
6063文章
44915瀏覽量
646864 -
機器人
+關注
關注
213文章
29477瀏覽量
211534 -
存儲器
+關注
關注
38文章
7633瀏覽量
166395 -
控制電路
+關注
關注
83文章
1727瀏覽量
136925
發布評論請先 登錄
分享100+套機器人設計資料(文末可免費領取)

盤點#機器人開發平臺
工業機器人設計工程師必備指南免費下載
現代(Hyundai)機器人物聯網平臺可以實現什么功能

上位機如何實現發送參數給單片機,單片機保存接收的參數重復運行指定的功能
如何實現51單片機與PC機的串行通信
蘋果推進開發桌面機器人設備
藍牙模塊如何實現單片機和手機端數據互傳





 工商網監
工商網監
評論