") 移動(dòng)邊緣計(jì)算,一種將顛覆無(wú)人駕駛的科學(xué)技術(shù)
移動(dòng)邊緣計(jì)算,一種將顛覆無(wú)人駕駛的科學(xué)技術(shù)
(文章來(lái)源:中國(guó)工控網(wǎng))
現(xiàn)今社會(huì)不管你有沒(méi)有車,出行總要坐車的。相信大家一定也有注意到,近幾年無(wú)人駕駛這一新鮮熱詞頻繁出現(xiàn)在大眾視野。看過(guò)諸多無(wú)人駕駛概念宣傳片,我們不約而同發(fā)出了“想要!我可以!”的呼喚聲。然而,盡管無(wú)人駕駛炒了很多年了,但落地的應(yīng)用幾乎沒(méi)有,而安全是制約無(wú)人駕駛技術(shù)落地的第一因素。
目前市場(chǎng)上的智能汽車最高只能達(dá)到L3級(jí)別,例如全球首款達(dá)到L3級(jí)別的無(wú)人駕駛的奧迪A8,以及比亞迪、百度等推出的智能汽車。在無(wú)人駕駛技術(shù)的L0-L5級(jí)別中,最高的L5代表著完全自動(dòng)化不需要駕駛員操控的技術(shù)水平。而L3呢,在突發(fā)情況路況不符合自動(dòng)駕駛時(shí),仍需要駕駛員手動(dòng)操作。業(yè)內(nèi)人士將L3級(jí)別形容為“反人類”的產(chǎn)品。
在不要求駕駛員必須操控方向盤的準(zhǔn)則下,突發(fā)情況時(shí),駕駛員真的能夠快速做出正確的反應(yīng)嗎?出事故了責(zé)任又該如何算呢?如果將無(wú)人駕駛技術(shù)簡(jiǎn)化,那么決定這一技術(shù)能否落地的三大關(guān)鍵點(diǎn)為——“感知、計(jì)算和反饋”。顯然,以上三點(diǎn)成敗的關(guān)鍵都需要用到一種不可或缺的技術(shù),即通信網(wǎng)絡(luò)技術(shù)。
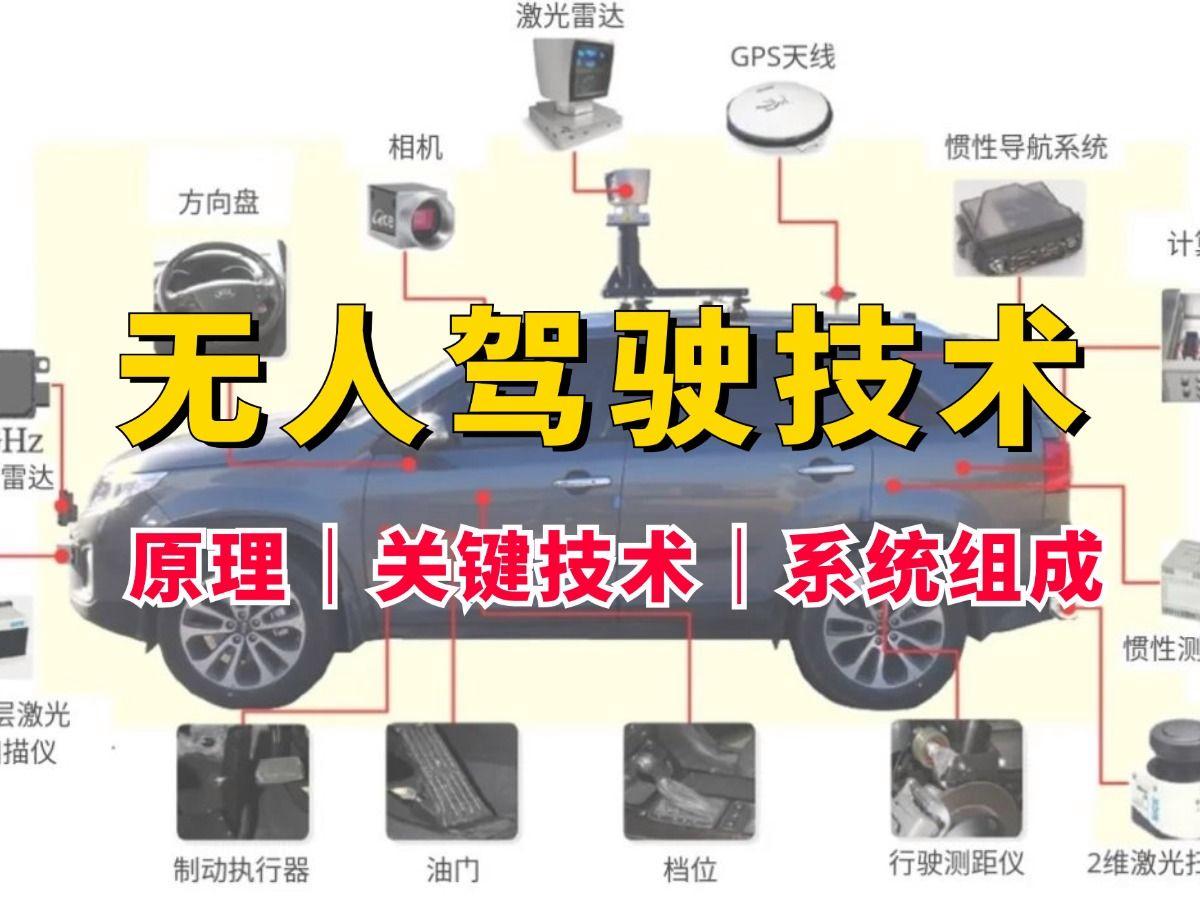
實(shí)際上,智能駕駛就是通過(guò)先進(jìn)的通信網(wǎng)絡(luò),將車輛傳感器收集到的所有信息集合處理,從而根據(jù)信息處理結(jié)果給車輛下達(dá)駕駛命令。目前智能汽車之所以安全等級(jí)只能達(dá)到L3,而達(dá)不到L5的完全無(wú)人駕駛級(jí)別,主要是受限于車輛中央處理單元的性能。中央處理單元的作用主要是將車輛傳感器收集到的信息進(jìn)行處理。所以,有人提出了將車輛遇到的所有信息都傳輸?shù)皆贫颂幚恚瑏?lái)指導(dǎo)車輛行駛。
不過(guò),由于車輛在高速行駛中所產(chǎn)生的數(shù)據(jù)量巨大,且對(duì)于時(shí)延的要求也極高,必須保持在1ms~10ms之間,目前汽車數(shù)據(jù)在網(wǎng)絡(luò)中往返傳輸?shù)臅r(shí)延達(dá)到了343ms,這顯然還差很遠(yuǎn)。因此,5G時(shí)代的邊緣計(jì)算則剛好彌補(bǔ)了云計(jì)算的不足。移動(dòng)邊緣計(jì)算平臺(tái)直接部署在6網(wǎng)絡(luò)的接入端,能夠極大的減少數(shù)據(jù)傳輸所消耗的時(shí)間,平臺(tái)分布式特征則還能夠很好地解決海量數(shù)據(jù)處理及海量終端連接的問(wèn)題。
這樣既能滿足傳輸速度問(wèn)題還能解決信息計(jì)算問(wèn)題。在現(xiàn)實(shí)的生產(chǎn)實(shí)踐中,遇到的案例并不總是像智能駕駛、視頻優(yōu)化等應(yīng)用一般,在一個(gè)平臺(tái)提供集中式的數(shù)據(jù)分析與處理。比如工業(yè)互聯(lián)網(wǎng),其特點(diǎn)是終端數(shù)量龐大,產(chǎn)生的數(shù)據(jù)多且雜,不同的終端設(shè)備可能面對(duì)的是完全不同的業(yè)務(wù)需求,現(xiàn)場(chǎng)的數(shù)據(jù)處理需求太過(guò)碎片化。如果采用云計(jì)算的方式,要么不滿足具體業(yè)務(wù)的需求,要么會(huì)造成大量網(wǎng)絡(luò)資源的浪費(fèi)。
這時(shí),將邊緣計(jì)算的計(jì)算存儲(chǔ)能力直接下沉到設(shè)備邊緣,在設(shè)備端直接對(duì)數(shù)據(jù)進(jìn)行處理,分析結(jié)果直接用于指導(dǎo)現(xiàn)場(chǎng)設(shè)備的生產(chǎn)制造。這樣邊緣設(shè)備甚至無(wú)需聯(lián)接外網(wǎng),可以解決邊緣側(cè)需求多樣化的問(wèn)題,從而降低企業(yè)的生產(chǎn)成本,提高生產(chǎn)效率。值得一提的是,工業(yè)互聯(lián)網(wǎng)平臺(tái)的邊緣層,對(duì)數(shù)據(jù)的處理主要是三個(gè)層次:
一是通過(guò)各類通信手段接入不同設(shè)備、系統(tǒng)和產(chǎn)品,采集海量數(shù)據(jù);二是依托協(xié)議轉(zhuǎn)換技術(shù)實(shí)現(xiàn)多源異構(gòu)數(shù)據(jù)的歸一化和邊緣集成;三是利用邊緣計(jì)算設(shè)備實(shí)現(xiàn)底層數(shù)據(jù)的匯聚處理,并實(shí)現(xiàn)數(shù)據(jù)向云端平臺(tái)的集成。對(duì)比發(fā)現(xiàn),邊緣計(jì)算在工業(yè)互聯(lián)網(wǎng)中的應(yīng)用,實(shí)際上更多是以邊緣設(shè)備的智能化改造的概念提出來(lái)的。
兩者的核心理念也較為接近,都是采用在終端安裝智能芯片或外接智能設(shè)備的方式讓設(shè)備具備一定計(jì)算能力,從而實(shí)現(xiàn)對(duì)設(shè)備自身簡(jiǎn)單生產(chǎn)流程的把控。
(責(zé)任編輯:fqj)
-
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14245瀏覽量
169946 -
邊緣計(jì)算
+關(guān)注
關(guān)注
22文章
3302瀏覽量
50667
發(fā)布評(píng)論請(qǐng)先 登錄

什么是低速無(wú)人駕駛,讓你一分鐘秒懂 #無(wú)人駕駛 #5g無(wú)人駕駛 #低速無(wú)人駕駛
無(wú)人駕駛技術(shù)未來(lái)在哪里?低速才是突破口

易控智駕無(wú)人駕駛技術(shù)再次取得新突破
無(wú)人駕駛解決方案包含哪些方面?感知、決策與控制
易控智駕發(fā)布礦山無(wú)人駕駛應(yīng)用落地成果
DeepSeek眼中的礦山無(wú)人駕駛
為什么聊自動(dòng)駕駛的越來(lái)越多,聊無(wú)人駕駛的越來(lái)越少?

測(cè)速雷達(dá)與無(wú)人駕駛技術(shù)的結(jié)合 測(cè)速雷達(dá)故障排除技巧
飛譜電子榮獲江蘇省科學(xué)技術(shù)一等獎(jiǎng)
無(wú)人駕駛的前世今生:一部充滿爭(zhēng)議的革命史

UWB模塊如何助力無(wú)人駕駛技術(shù)
無(wú)線充電技術(shù)為低速無(wú)人駕駛清掃車注入無(wú)限動(dòng)力
特斯拉推出無(wú)人駕駛Model Y
邊緣計(jì)算的實(shí)際應(yīng)用和使用案例
5G賦能車聯(lián)網(wǎng),無(wú)人駕駛引領(lǐng)未來(lái)出行






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論