 如何使用很少的組件制作arduino移動車
如何使用很少的組件制作arduino移動車
第1步:零件和工具
這些是所需的零件和工具。制作這輛機器人漫游車:
?微伺服器
?Hc sr04超聲波傳感器
?車輪2個電動和1個可以移動360度的車輪(如辦公椅中使用的車輪)
?光傳感器(CDS光電管)可選
?led可選
??Arduino UNO或類似產品??9伏電池到直流桶形適配器
?機器人底座(我使用了激光切割機丙烯酸片)
?9伏電池
?3d印刷伺服支架(我在本地Makerspace上挖了我的地殼)
步驟2:將超聲波傳感器連接到Arduino
將Adafruit盾牌放在arduino上,然后將導線焊接到Ping傳感器上的每個引腳上,您可以使用母頭來完成此操作,但我發現直接焊接起來更容易。將VCC連接到五伏接地觸發器到A4,并將回聲連接到A5,將微型伺服連接到屏蔽板上的伺服2引腳
步驟3:連接每個電動機
將其中一個電機連接到電機4,將另一個電機連接到電機1。然后使用熱膠,然后將非電動車輪上的膠粘到基座的前面
步驟4:將伺服膠粘到基座上
將微型伺服膠粘到在流動站的基座上,然后使用隨伺服器提供的伺服喇叭,將其置于伺服器的頂部(確保伺服器位于中心位置),將伺服器安裝座粘在伺服喇叭上,然后將其擰到伺服器上
第5步:將超聲傳感器推到安裝座上
將超聲傳感器推到應該安裝的安裝座上
步驟6:編寫Arduino
使用此代碼:
步驟7:文件 H2》
文件:
http://www.thingiverse.com/thing:42499
此不是我的文件,我將全部歸功于該文件的創建者wsolstice69
步驟8:其他功能:
這是我所包含的另一個功能代碼中的:光傳感器功能,可將光傳感器連接到該流動站,當天黑時,它將打開LED,可以隨意更改代碼上的光敏閾值。
將LED插入A1并接地,將光傳感器插入5伏,另一側連接到10 kohm電阻,該電阻接地并連接到A0
步驟9:插入電池并將9伏電池的
插入到9伏直流桶式插頭適配器中。開啟它,它應該可以正常工作,但有時會擊中墻壁,否則效果很好。
責任編輯:wv
-
機器人
+關注
關注
213文章
29513瀏覽量
211660 -
Arduino
+關注
關注
189文章
6492瀏覽量
190166
發布評論請先 登錄
免費分享Arduino入門+進階(全套例程+書籍)

《ESP32S3 Arduino開發指南》第二章 Arduino基礎知識
一種永磁電機用轉子組件制作方法
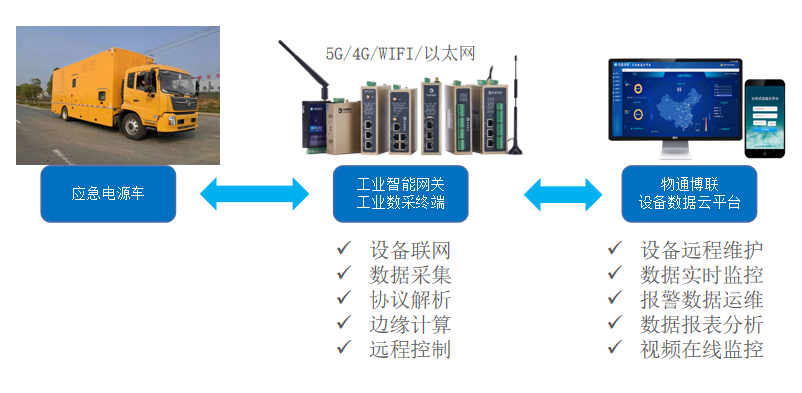
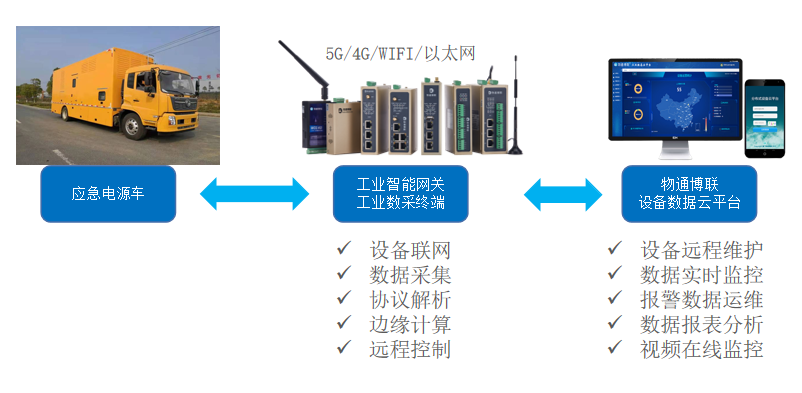
移動儲能車(應急電源車)遠程監控智能管理系統方案
移動儲能車遠程監控集中管理系統方案
開源項目!打造一款FPV頭部追蹤相機,讓你仿佛置身遙控車之中!
移動電源車運維管理IoT平臺解決方案
開源項目!基于 Arduino 的 MIDI 架子鼓
移動儲能車遠程監控管理系統
車用多芯片組件AEC-Q104規范






 工商網監
工商網監
評論