完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > slam
SLAM (simultaneous localization and mapping),也稱為CML (Concurrent Mapping and Localization), 即時定位與地圖構建,或并發建圖與定位。問題可以描述為:將一個機器人放入未知環境中的未知位置
文章:410個 瀏覽:32485次 帖子:26個
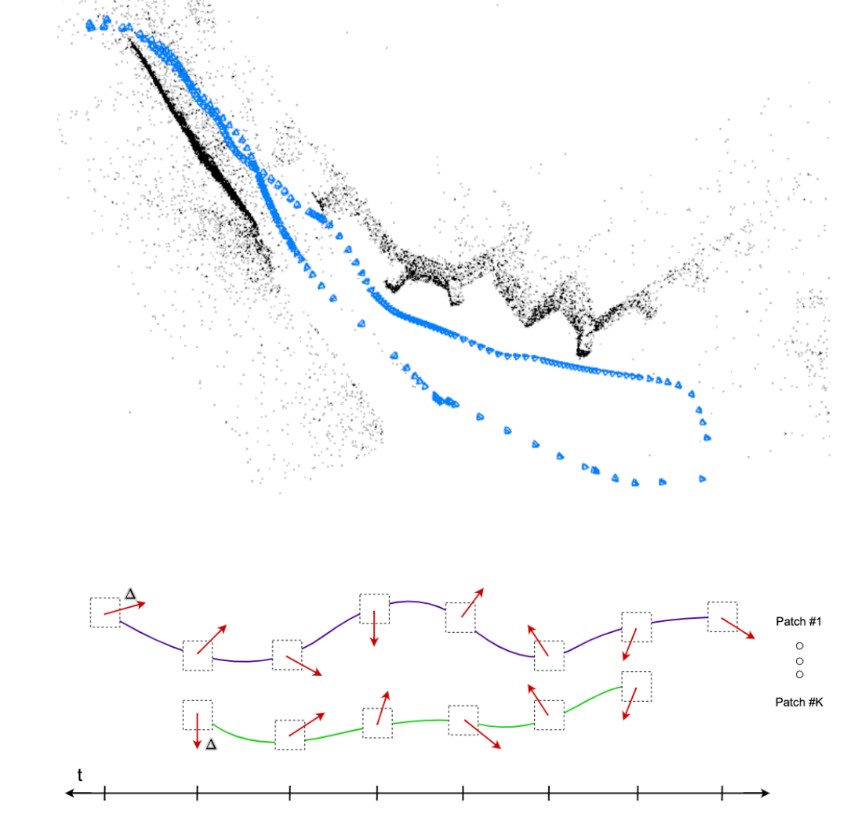
同時定位和映射(SLAM)是大多數自主系統所需的基本能力。在本文中,我們討論了基于自動駕駛汽車記錄的3D激光掃描的SLAM閉環問題。

服務機器人、巡檢機器人、自動駕駛車輛等SLAM應用,需要進行長時間的定位和導航,但是可能會遇到很多光照變化(甚至天氣季節變化)、不同視角提取的不同特征、...

k-d樹是一種常用的多維數據結構,它可以用于范圍搜索、最近鄰搜索等問題。但是,在實際應用中,我們經常需要對動態數據進行查詢和修改操作。
基于動態環境中的魯棒BA和選擇性全局優化的魯棒VI-SLAM框架
視覺慣性里程計和SLAM算法廣泛應用于各種領域,如服務機器人、無人機和自主車輛。大多數SLAM算法都是基于靜態環境假設。然而,在現實世界中,存在各種動態...
結構光測距是用一個光源(常用是紅外)將一定的圖案投射到物體上,再用攝像頭收集變形后的圖案進行深度計算。

激光 SLAM 任務是搭載激光雷達的主體于運動中估計自身的位姿,同時建立周圍的環境地圖。而準確的定位需要精確的地圖,精確的地圖則來自于準確的定位,定位側...
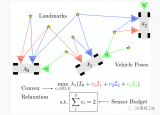
在本文中,我們提出了OASIS方法,用于優化地在一個用于執行SLAM的移動機器人上布置傳感器。我們的方法將設計任務形式化為在一個可計算的E-最優性性能度...
大多數無人機利用全球導航衛星系統(GNSS)技術和慣性傳感器(INS)來估計自己的地理空間定位。無人機通過GNSS接收器進行增強,這些接收器受益于從衛星...
Camera是自動駕駛系統中的主要傳感器,它們提供高信息密度,最適合檢測為人類視覺而設置的道路基礎設施。

神經隱式表示已經被探索用于增強視覺SLAM掩碼算法,特別是在提供高保真的密集地圖方面。
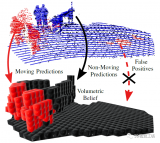
算法將雷達點云做為輸入,可以直接判定點是否屬于動態物體。還能構建Volumetric Belief地圖(可以理解為存儲每個點是否動態的概率),構建完地圖...
后面計算的是特征點主方向上的描述子,計算過程中要將特征點周圍像素旋轉到主方向上,因此計算一個半徑為16的圓的近似坐標,用于后面計算描述子時進行旋轉操作.
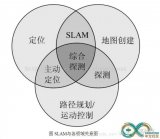
正如圖中所示,機器人自主定位導航技術中包括:定位和地圖創建(SLAM)與路徑規劃和運動控制兩個部分,而SLAM本身只是完成機器人的定位和地圖創建,二者有所區別。

可以看一下單目深度估計效果,這個深度圖的分辨率是真的高,物體邊界分割的非常干凈!這里也推薦工坊推出的新課程《單目深度估計方法:算法梳理與代碼實現》。
雖然在SLAM和SFM中,特征點已經被廣泛研究,但在圖像中分布不均勻的特征點可能會導致不穩定和不準確的姿態估計。

相似結構一直是SLAM和SfM中很難處理卻又不得不處理的問題,如果機器人遇到了非常相似但實際不同的結構,很容易因為匹配數量足夠多而引發假陽性回環和重建失...
如何去使用深度學習的model SLAM位姿估計的自訓練方法
如何進行魯棒的位姿圖優化來得到比較可靠的SLAM估計?提出了一種自動協方差調整的位姿圖優化,這里如果展開講可能需要很長時間,在這邊只做一個比較宏觀的介紹。
 換一批
換一批
編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1