完善資料讓更多小伙伴認(rèn)識(shí)你,還能領(lǐng)取20積分哦,立即完善>
標(biāo)簽 > 機(jī)械臂
機(jī)械臂是指高精度,多輸入多輸出、高度非線性、強(qiáng)耦合的復(fù)雜系統(tǒng)。因其獨(dú)特的操作靈活性,已在工業(yè)裝配、安全防爆等領(lǐng)域得到廣泛應(yīng)用。
文章:384個(gè) 瀏覽:25305次 帖子:50個(gè)
選擇每個(gè)關(guān)節(jié)的角度并添加到一堆命令。任何兩個(gè)命令之間都可能使用延遲。請(qǐng)注意,在發(fā)送新命令之前,延遲必須足夠大以確保先前的命令已結(jié)束(機(jī)器人已達(dá)到最后設(shè)定點(diǎn))。
注意 - 發(fā)現(xiàn)如果使用的這些特殊的柔性傳感器變得太臟,它會(huì)開(kāi)始影響柔性傳感器的工作方式,因此,將磁帶放在傳感器上以保持其清潔
2019-11-07 標(biāo)簽:機(jī)械臂 3646 0
第一財(cái)經(jīng)全力構(gòu)建媒體發(fā)展新生態(tài),新科技驚艷首發(fā)
第一財(cái)經(jīng)秉承專業(yè)創(chuàng)造價(jià)值的品牌理念,在認(rèn)真總結(jié)參與2018世界人工智能大會(huì)的經(jīng)驗(yàn)基礎(chǔ)上,更深入滲透到2019世界人工智能大會(huì)的框架搭建、嘉賓邀請(qǐng)、主題設(shè)...
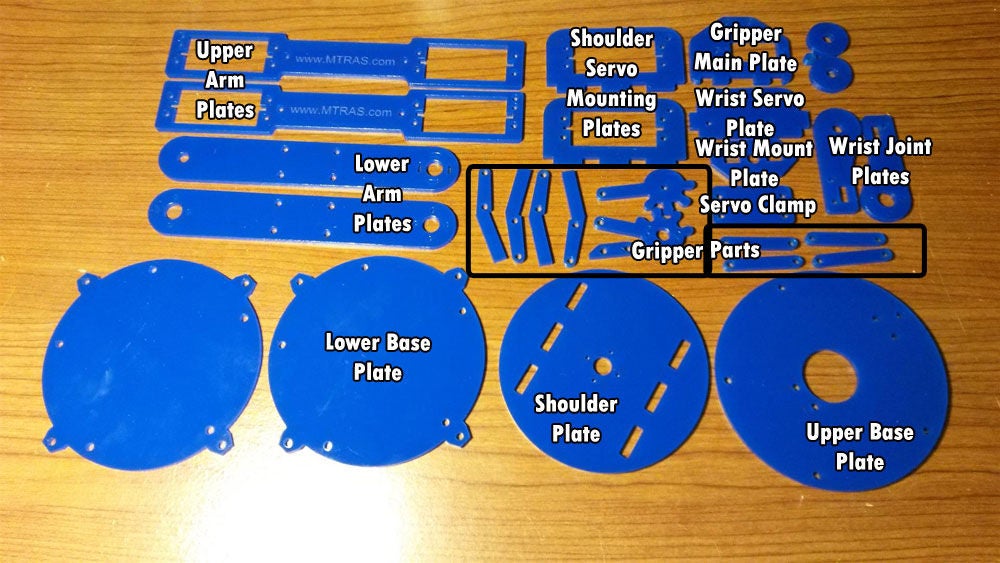
在組裝之前,我必須測(cè)試零件并選擇合適的烙鐵,這是通過(guò)繪制虛擬精加工項(xiàng)目作為我的指導(dǎo)。
建筑工人的短缺看來(lái)是一個(gè)全球問(wèn)題,特別是我們這種基建狂魔的國(guó)家,很多科技寡頭都投資在未來(lái)的機(jī)器人領(lǐng)域,很多人都在納悶,建筑行業(yè)真能被機(jī)器人顛覆嗎?
在開(kāi)始之前,請(qǐng)確保將所有的伺服系統(tǒng)!如果在施工過(guò)程中的任何時(shí)候,如果您手動(dòng)移動(dòng)伺服的位置,則需要在將其固定到框架之前重新定位。對(duì)于始終需要一致移動(dòng)的肩...
2019-08-22 標(biāo)簽:機(jī)械臂 1.2萬(wàn) 0
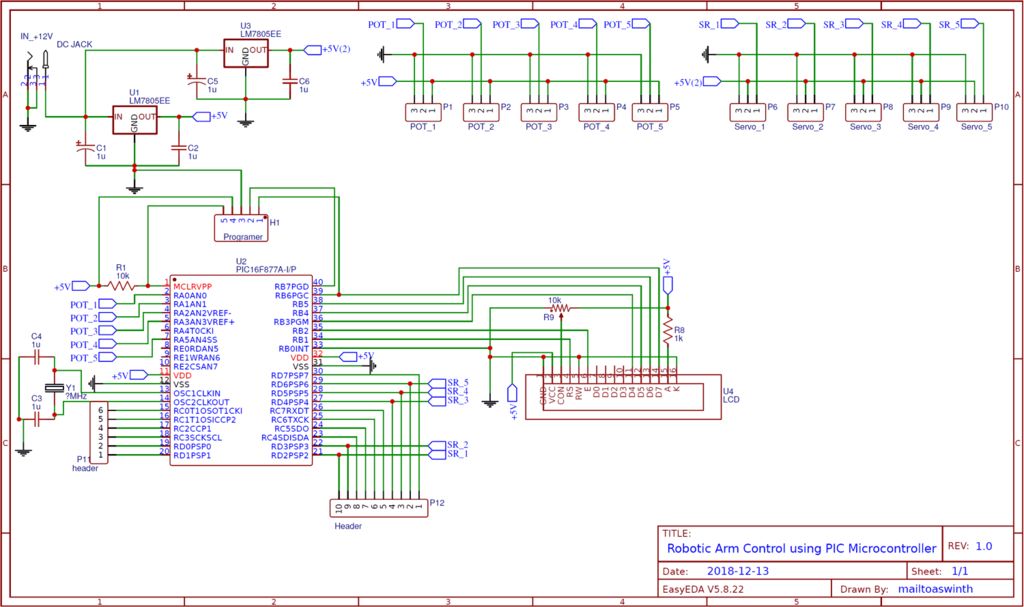
電路圖非常簡(jiǎn)單;整個(gè)項(xiàng)目由12V適配器供電。然后使用兩個(gè)7805電壓調(diào)節(jié)器將此12V轉(zhuǎn)換為+ 5V。一個(gè)標(biāo)記為+ 5V,另一個(gè)標(biāo)記為+ 5V(2)。具有...
2019-08-08 標(biāo)簽:PIC單片機(jī)機(jī)械臂 7881 0
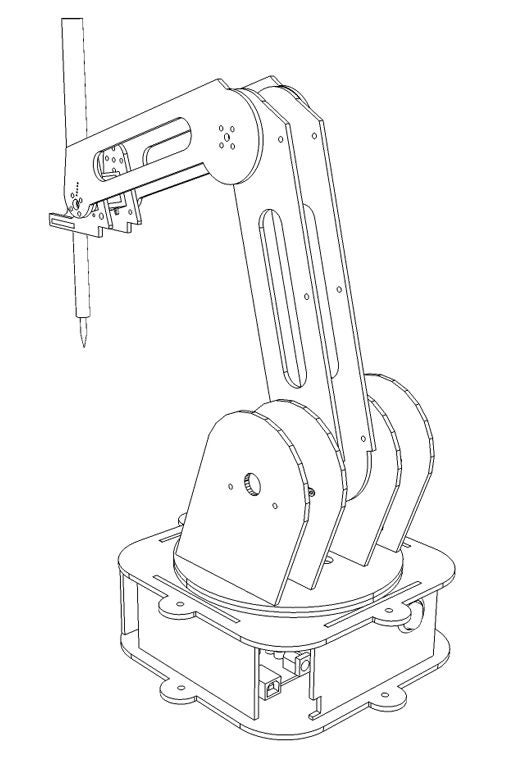
可以看出,它有一個(gè)可以握筆的夾子,或者在我們的情況下是一個(gè)油漆瓶,當(dāng)夾具盡可能閉合時(shí),可以擠壓。
指尖設(shè)計(jì)用于雙擠壓3D打印機(jī),因?yàn)楹谏P尖太薄而無(wú)法自行打印。
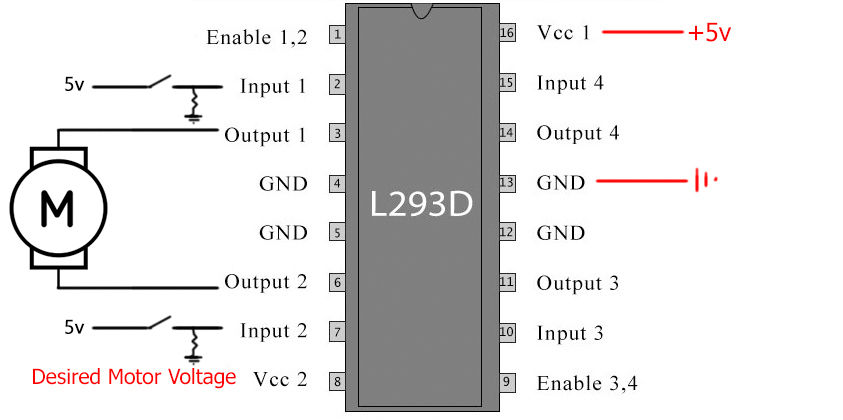
連接組件根據(jù)這些示意圖到L293D。 H橋使您能夠控制電路中流動(dòng)的電流方向,從而控制電機(jī)的旋轉(zhuǎn)方向。

關(guān)于MATLAB中的機(jī)械臂算法的分析和介紹
可以看到,隨著 end-effector 的移動(dòng),它的方向也在不斷做出平滑的調(diào)整,在 end-effector 運(yùn)行到目標(biāo)位置后,它的方向也調(diào)整到位。當(dāng)...
怎樣通過(guò)外部電位計(jì)控制的伺服電機(jī)創(chuàng)建簡(jiǎn)單的機(jī)械臂
機(jī)器人有多種形式,包括無(wú)人機(jī),汽車,流動(dòng)站和甚至是步行者。讓機(jī)器人在其環(huán)境中移動(dòng)非常重要,讓它與環(huán)境進(jìn)行交互同樣重要。
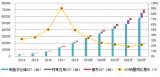
AGV迅速發(fā)展起來(lái) 無(wú)論產(chǎn)品還是市場(chǎng)融資 堪稱火爆
受益于電商物流的崛起,AGV取代了人的雙腳,迅速發(fā)展起來(lái),尤其是從2015年開(kāi)始,無(wú)論從產(chǎn)品落地還是市場(chǎng)融資,堪稱火爆。GGII數(shù)據(jù)顯示,2018年AG...
涉及機(jī)器視覺(jué)、圖像處理、模式識(shí)別/機(jī)器學(xué)習(xí)等相關(guān)人工智能技術(shù)。配合傳感器或機(jī)器人等不同的載體,計(jì)算機(jī)視覺(jué)能夠輔助生產(chǎn)流程中需求“感知”的任務(wù)。如配合機(jī)械...
2019-07-11 標(biāo)簽:物聯(lián)網(wǎng)人工智能機(jī)械臂 9192 0
工業(yè)機(jī)器人企 業(yè)開(kāi)始瞄準(zhǔn)制鞋行業(yè)了!
面對(duì)這一大“蛋糕”,在汽車、3C 等產(chǎn)業(yè)領(lǐng)域應(yīng)用已趨于成熟的工業(yè)機(jī)器人企業(yè),開(kāi)始將新場(chǎng)景落地方向瞄準(zhǔn)制鞋行業(yè)。
生產(chǎn)事故不斷發(fā)生,工業(yè)機(jī)器人安全規(guī)程豈能置若罔聞
事故頻發(fā)
2019-07-11 標(biāo)簽:工業(yè)機(jī)器人機(jī)械臂 4246 0
全球首個(gè)自適應(yīng)機(jī)械臂 應(yīng)用場(chǎng)景可遷移
而且這也是世界上第一個(gè)自適應(yīng)機(jī)器人,結(jié)合力覺(jué)控制和AI技術(shù),可以為最終在制造業(yè)、醫(yī)療、零售等多個(gè)領(lǐng)域通過(guò)機(jī)器人完成復(fù)雜工作任務(wù)而奠定基礎(chǔ)。
2019-07-10 標(biāo)簽:人工智能計(jì)算機(jī)視覺(jué)機(jī)械臂 6697 0
關(guān)于垃圾分類,這些機(jī)器人可能將來(lái)會(huì)大賣(mài)哦!
垃圾分類看似是舉手之勞,但真正做起來(lái)難度卻不小。
 換一批
換一批
編輯推薦廠商產(chǎn)品技術(shù)軟件/工具OS/語(yǔ)言教程專題
| 電機(jī)控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動(dòng)駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無(wú)刷電機(jī) | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機(jī) | PID | MOSFET | 傳感器 | 人工智能 | 物聯(lián)網(wǎng) | NXP | 賽靈思 |
| 步進(jìn)電機(jī) | SPWM | 充電樁 | IPM | 機(jī)器視覺(jué) | 無(wú)人機(jī) | 三菱電機(jī) | ST |
| 伺服電機(jī) | SVPWM | 光伏發(fā)電 | UPS | AR | 智能電網(wǎng) | 國(guó)民技術(shù) | Microchip |
| Arduino | BeagleBone | 樹(shù)莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開(kāi)發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1

