 基于PIC單片機的機械臂制作教程
基于PIC單片機的機械臂制作教程

步驟1:電路圖
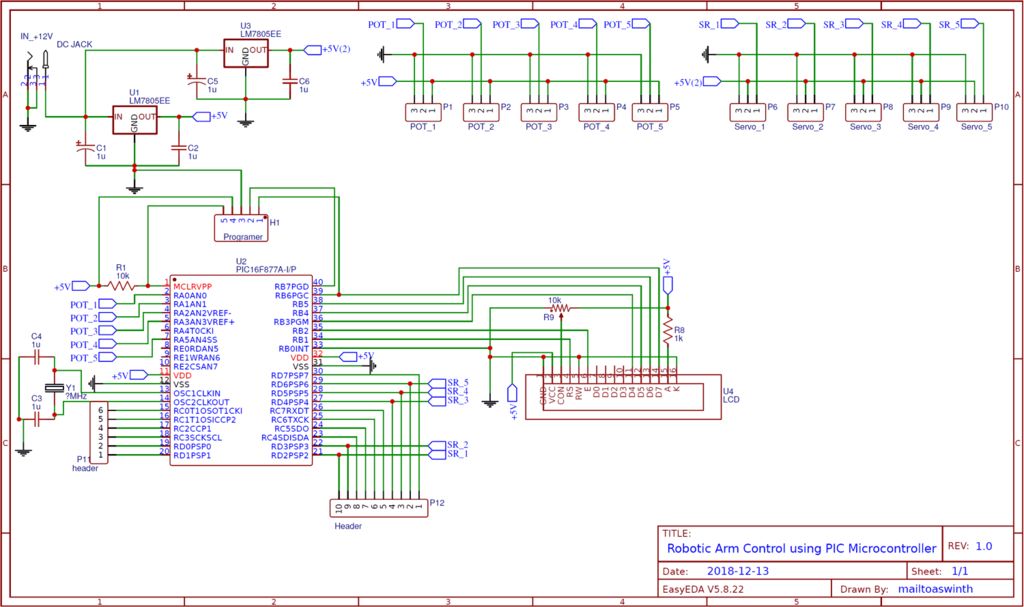
電路圖非常簡單;整個項目由12V適配器供電。然后使用兩個7805電壓調節器將此12V轉換為+ 5V。一個標記為+ 5V,另一個標記為+ 5V(2)。具有兩個調節器的原因是當伺服旋轉時,它會吸入大量電流,從而產生電壓降。這種電壓降迫使PIC重新啟動,因此我們無法在同一+ 5V電壓軌上同時運行PIC和伺服電機。因此標有+ 5V的電源用于為PIC單片機,LCD和電位計供電,標有+ 5V(2)的獨立穩壓器輸出用于為伺服電機供電。
提供0V至5V可變電壓的電位器的五個輸出引腳連接到PIC的模擬引腳An0至AN4。由于我們計劃使用定時器來產生PWM,因此伺服電機可以連接到任何GPIO引腳。我為伺服電機選擇了RD2到RD6的引腳,但它可以是您選擇的任何GPIO。
由于程序涉及大量調試,因此16x2 LCD顯示器也連接到PIC的portB。這將顯示正在控制的伺服電機的占空比。除此之外,我還擴展了所有GPIO和模擬引腳的連接,以防將來需要連接任何傳感器。最后,我還連接了編程器引腳H1,使用ICSP編程選項直接使用pickit3對PIC進行編程。
步驟2:在GPIO引腳上生成PWM信號以進行伺服電機控制
電路準備就緒后,我們必須弄清楚如何生成PWN PIC的GPIO引腳上的信號用于控制伺服電機。我們已經使用Timer中斷方法累了類似的東西并且成功了。在這里,我們將建立在它之上。
所有業余愛好伺服電機的工作頻率為50Hz。這意味著伺服電機的一個完整脈沖周期為1/50(F = 1/T),即20ms。在這20ms內,控制信號僅為0到2ms,而其余信號總是關閉。下圖顯示了ON時間如何僅在0到2ms之間變化,將電機從0度旋轉到180度持續20ms。
考慮到這一點,我們必須在這樣的情況下編寫程序PIC從電位計讀取0到1204的方式并將其映射到0到100,這將是伺服電機的占空比。使用此占空比,我們可以計算伺服電機的ON時間。然后我們可以定期中斷初始化定時器中斷,使其與Arduino中的millis()函數類似。這樣,我們可以將狀態GPIO引腳切換為高電平達到所需的持續時間,并在20ms(一個完整周期)后將其關閉,然后重復相同的過程。現在,我們已經了解了邏輯,讓我們進入程序。
步驟3:為機器人臂編程PIC16F8771A
總是像完整的程序一樣視頻可以在本頁末尾找到,代碼也可以從這里下載所有必要的文件。在本節中,我們將討論該程序背后的邏輯。該程序采用ADC模塊,定時器模塊和LCD模塊來控制機械臂。如果您不了解如何使用ADC功能或定時器功能或將LCD與PIC連接,則可以回退到相應的鏈接以了解它們。假設讀者熟悉這些概念,下面給出了解釋。
定時器0端口配置
代碼中最重要的部分是將Timer 0設置為過流具體延遲。計算此延遲的公式可以給出為
Delay = ((256-REG_val)*(Prescal*4))/Fosc
通過使用OPTION_REG和TMR0寄存器,我們將Timer 0設置為以預分頻值32運行,REG val設置為248.我們硬件中使用的晶體頻率(Fosc)為20Mhz。使用這些值,延遲可以計算為
Delay = ((256-248)*(32*4)) / (20000000)
= 0.0000512 seconds (or)
= 0.05 msec
所以現在我們已經將計時器設置為每0.05ms溢出一次。下面給出了執行相同操作的代碼
/*****Port Configuration for Timer ******/
OPTION_REG = 0b00000100; // Timer0 with external freq and 32 as prescalar // Also Enables PULL UPs
TMR0=248; // Load the time value for 0.0001s; delayValue can be between 0-256 only
TMR0IE=1; //Enable timer interrupt bit in PIE1 register
GIE=1; //Enable Global Interrupt
PEIE=1; //Enable the Peripheral Interrupt
/***********______***********/
在伺服電機的總0ms到2ms控制窗口中,我們可以用0.05msec的分辨率控制它,這使得我們可以在0度之間為電機提供(2/0.05)40個不同的位置到180度。如果您的MCU可以支持它以獲得更多位置和精確控制,您可以進一步降低此值。
中斷服務程序(ISR)
現在我們將Timer 0設置為每0.05ms溢出一次,我們將TMR0IF中斷標志設置為0.05ms。因此,在ISR函數中,我們可以重置該標志并將名為count的變量遞增1。所以現在這個變量每0.05ms增加1。
void interrupt timer_isr() {
if(TMR0IF==1) // Timer flag has been triggered due to timer overflow -》 set to overflow for every 0.05ms {
TMR0 = 248; //Load the timer Value
TMR0IF=0; // Clear timer interrupt flag
count++; //Count increments by 1 for every 0.05ms }
計算占空比和導通時間
接下來,我們必須計算所有五個伺服電機的占空比和導通時間。我們有五個伺服電機,每個伺服電機用于控制臂的各個部分。因此,我們必須讀取所有五個的ADC值,并計算每個的占空比和導通時間。
ADC值將在0到1024的范圍內,只需將0.0976(100/1024 = 0.0976)乘以獲得的值即可轉換為0%至100%占空比。然后必須將此0到100%的占空比轉換為ON時間。我們知道,在100%占空比時,ON時間必須為2ms(180度),因此乘以0.02(2/100 = 0.02)將0到100占空比轉換為0到2ms。但是我們的定時器變量計數設置為每0.05ms增加一次。這意味著每1ms計數值將為20(1/0.05 = 20)。所以我們必須將20乘以0.02來計算我們程序的準確時間,這將給出0.4(0.02 * 20 = 0.4)的值。相同的代碼如下所示,你可以看到它使用for循環重復5次。結果值存儲在T_ON數組中。
for (int pot_num=0; pot_num《=3; pot_num++)
{ int Pev_val = T_ON[pot_num];
POT_val = (ADC_Read(pot_num)); //Read the value of POT using ADC
Duty_cycle = (POT_val * 0.0976); //Map 0 to 1024 to 0 to 100
T_ON[pot_num] = Duty_cycle* 0.4;//20*0.02
選擇要旋轉的電機
我們無法控制所有五個電機,因為它會使ISR代碼大幅減速整個微控制器。所以我們一次只能旋轉一個伺服電機。要選擇旋轉哪個伺服,微控制器會監控所有五個伺服電機的開啟時間,并將其與之前的準時進行比較。如果ON時間發生變化,我們可以得出結論,必須移動特定的伺服。相同的代碼如下所示。
if (T_ON[pot_num] != Pev_val) {
Lcd_Clear();
servo = pot_num;
Lcd_Set_Cursor(2,11); Lcd_Print_String(“S:”);
Lcd_Print_Char(servo+‘0’);
if (pot_num==0)
{Lcd_Set_Cursor(1,1);
Lcd_Print_String(“A:”);}
else if (pot_num==1)
{Lcd_Set_Cursor(1,6);
Lcd_Print_String(“B:”);}
else if (pot_num==2)
{Lcd_Set_Cursor(1,11);
Lcd_Print_String(“C:”);}
else if (pot_num==3)
{Lcd_Set_Cursor(2,1);
Lcd_Print_String(“D:”);}
else if (pot_num==4)
{Lcd_Set_Cursor(2,6);
Lcd_Print_String(“E:”);}
char d2 = (Duty_cycle) %10;
char d1 = (Duty_cycle/10) %10;
Lcd_Print_Char(d1+‘0’);Lcd_Print_Char(d2+‘0’);
我們還在LCD屏幕上打印伺服占空比,以便用戶了解其當前位置。基于接通時間的變化,可變伺服系統用0到4的數字更新,每個數字代表各個電動機。
控制ISR內部的伺服電機
在ISR內部,變量計數每0.05ms增加一次,這意味著每1ms變量將增加20。使用它我們必須控制引腳以產生PWM信號。如果count的值小于導通時間,則使用下面的行
打開該電機的GPIOPORTD = PORTD | servo_code[servo];
此處,數組servo_code []具有所有五個伺服電機的引腳細節,并根據變量伺服中的值,將使用該特定伺服電機的代碼。然后邏輯OR(|)與現有的PORTD位,這樣我們就不會干擾其他電機的值,只更新這個特定的電機。類似地,關閉引腳
PORTD = PORTD & ~(servo_code[servo]);
我們使用邏輯反轉(?)運算符反轉了位值,然后在PORTD上執行AND(&)操作以僅關閉所需的引腳,同時將其他引腳保持在先前的狀態。完整的代碼段如下所示。
void interrupt timer_isr() {
if(TMR0IF==1) // Timer flag has been triggered due to timer overflow -》 set to overflow for every 0.05ms {
TMR0 = 248; //Load the timer Value
TMR0IF=0; // Clear timer interrupt flag
count++; //Count increments by 1 for every 0.05ms -》 count will be 20 for every 1ms (0.05/1 = 20)) }
int servo_code[] = {0b01000000, 0b00100000, 0b00010000, 0b00001000, 0b00000100 };
if (count 》= 20*20)
count=0;
if (count 《= (T_ON[servo]) )
PORTD = PORTD | servo_code[servo];
else
PORTD = PORTD & ~(servo_code[servo]); }
我們知道在GPIO引腳再次打開之前,總周期必須持續20ms。因此,我們通過將count的值與400(上面討論的計算相同)進行比較來檢查計數是否超過20ms,如果是,我們必須再次將計數初始化為零。
步驟4:PIC機械臂代碼的模擬
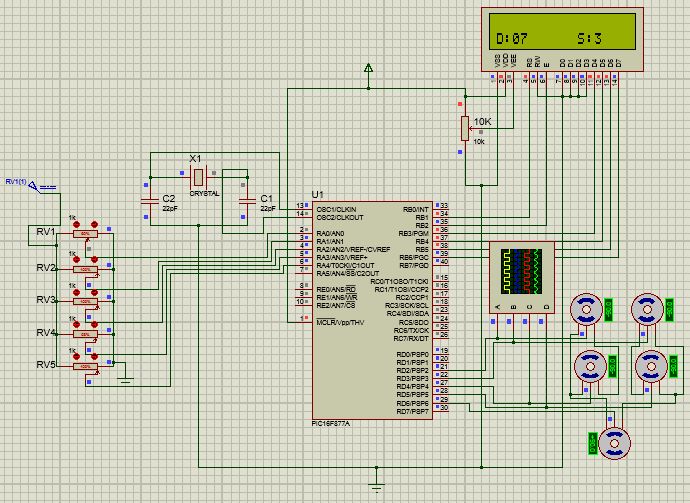
在將代碼送到真實硬件之前,最好先模擬代碼。所以我使用Proteus來模擬我的代碼并驗證它是否正常工作。用于仿真的電路如下所示。我們使用示波器檢查是否按要求生成PWM信號。此外,我們可以驗證LCD和伺服電機是否按預期旋轉。
正如您所見,LCD根據第3電機的電位值顯示電機D的占空比為07。類似的,如果移動另一個電位器,則該電位器的占空比及其電機編號將顯示在LCD上。示波器上顯示的PWM信號
使用示波器上的光標選項測量的總循環周期為22.2ms,非常接近所需的20ms。最后,我們確信代碼有效,因此要繼續使用電路,我們可以將其焊接在穿孔板上或使用PCB。它不會在面包板上輕松工作,因為POT總是會因連接不良而產生一些問題。
設計此PIC機器人手臂,我們選擇了名為EasyEDA的在線EDA工具。我已經使用它很長一段時間了,因為它占地面積大,易于使用,所以非常方便。在設計PCB之后,我們可以通過其低成本PCB制造服務訂購PCB樣品。他們還提供組件采購服務,他們擁有大量電子元件,用戶可以訂購他們所需的組件以及PCB訂單。
在線計算和訂購樣品
完成此設計后PIC Robot PCB,您可以通過JLCPCB.com訂購PCB。要從JLCPCB訂購PCB,您需要Gerber File。要下載PCB的Gerber文件,只需單擊EasyEDA編輯器頁面上的Generate Fabrication File按鈕,然后從那里下載Gerber文件,或者您可以單擊JLCPCB上的Order,如下圖所示。這會將您重定向到JLCPCB.com,在那里您可以選擇要訂購的PCB數量,所需的銅層數,PCB厚度,銅重量,甚至PCB顏色,如下圖所示:
選擇所有選項后,單擊“保存到購物車”,然后您將進入可以上傳我們從EasyEDA下載的Gerber文件的頁面。上傳您的Gerber文件,然后單擊“保存到購物車”。最后安全地點擊Checkout以完成您的訂單,然后您將在幾天后獲得PCB。他們以非常低的速率制造PCB,價格為2美元。他們的建造時間也非常少,這是48小時DHL交付3-5天,基本上你會在訂購后一周內獲得你的PCB。
訂購PCB后,您可以查看PCB的生產進度以及日期和時間。您可以通過進入“帳戶”頁面并點擊“生產進度”進行檢查。
訂購PCB后幾天,我將PCB樣品裝在漂亮的包裝中。
在獲得這些碎片之后,我已經在PCB上焊接了所有必需的元件。我也直接焊接POT而不是使用連接線,因為我最初使用的母線到母線可能會因為接觸松動而產生奇怪的模擬輸出電壓。組裝完所有組件后,我的PCB看起來像這樣。
你可能已經注意到這塊板上只有一個7805。那是因為最初我認為我可以通過調節器為PIC和伺服電機供電,后來我意識到我需要兩個。所以我使用外部電路通過你在這里看到的綠線為伺服電機供電。
然而,你不必擔心它,因為;我現在已對PCB進行了更改。您可以使用修改過的PCB并焊接板上的穩壓器。
PIC機器人手臂的工作
經過所有的疲勞工作后,我們需要付出代價。焊接電路板上的所有組件并將程序上載到PIC控制器。完整代碼如下,或者可以從這里下載。電路板上提供的編程連接器可以幫助您直接使用Pickit 3上傳程序,而不會有太多麻煩。程序上傳后,您應該看到LCD顯示當前正在控制的伺服。要了解有關PIC單片機編程的更多信息,請按照上一個教程進行操作。
從那里你可以簡單地轉動電位器并檢查伺服電機如何響應每個電位器。一旦您了解了格式,您就可以控制機器人手臂執行您需要執行的任何操作并獲得樂趣。
-
PIC單片機
+關注
關注
65文章
693瀏覽量
102975 -
機械臂
+關注
關注
13文章
551瀏覽量
25305
發布評論請先 登錄
輝芒微FT61FC23-RB單片機兼容微芯PIC16F676芯片

Microchip發布PIC16F17576系列單片機
AN4873-使用PIC單片機的集成運算放大器測量水中的總溶解固體

單片機Debug工具性能對比 單片機調試常用命令
機械臂的高效運作,連接器起關鍵作用
單片機的中斷機制
PIC單片機的優勢和不足之處
單片機燒錄程序的基本步驟是什么
OrangePi AIpro應用:機械臂應用開發指南

大象機器人開源協作機械臂機械臂接入GPT4o大模型!






 工商網監
工商網監
評論